自升式平台桩腿下放长度对其运动响应的影响
2018-03-06,,,
,,,
(太重(天津)滨海重型机械有限公司 技术中心,天津 300457)
0 引 言
自升式平台是目前海洋油气勘探开发中应用最为广泛的移动式钻井设施之一[1]。平台就位过程是指平台经拖船拖航到达指定海域,通过拖船协助放锚进行精确定位后,下放桩腿直至平台升起的过程。在桩腿下放的过程中,平台处于漂浮状态,随着桩腿下放长度的不断增加,平台整体的重心位置和浮心位置不断变化,作用在桩腿上的波浪载荷、流载荷也不断变化,增加了平台受力的复杂性。如果平台在纵荡、横荡和垂荡方向运动过大,很可能使平台偏离预定位置,导致桩腿和海底发生碰撞,进而影响平台的顺利就位。因此,研究自升式平台在桩腿下放过程中的运动响应问题,对平台安全准确就位具有重要的意义。
何堃等[2]利用SESAM软件对自升式平台就位过程中桩腿触底问题进行计算分析,对平台运动响应进行短期统计预报;张兆德等[3]对沉垫自升式平台就位过程中沉垫下放1 m时平台垂荡、横摇、纵摇3个自由度的运动响应和锚链张力进行计算分析,研究结果表明波浪的入射角和周期对平台运动有很大影响,纵摇和横摇对波浪入射的方向更敏感;勾莹等[4]对自升式平台桩腿下放过程中的平台运动响应进行物理模型试验研究;李龙祥等[5]通过大量的模型试验,研究环境荷载角度和载量的变化对系泊时自升式钻井平台运动响应的影响。现有研究大多集中在对桩腿与基础的相互作用和插桩过程碰撞问题上,对平台模型在不同波浪海况条件下的运动响应进行对比分析,而对自升式平台桩腿下放过程中平台整体运动响应变化的研究相对较少。
本文针对平台桩腿下放过程中的运动响应特性进行研究。以TZ 400自升式平台为计算模型,基于三维势流理论和Morison方程,利用AQWA软件对不同桩腿下放长度进行不规则波下的时域模拟,同时考虑海流对平台的作用。根据计算结果对自升式平台在不同桩腿下放长度下的运动响应进行统计分析,重点考虑平台在纵荡、横荡和垂荡方向上的运动,以便为平台安全就位过程提供参考。
1 理论方法
1.1 势流理论
采用势流理论计算作用在主船体上的波浪载荷。通过速度势描述流场,速度势应在流体各处满足拉普拉斯方程,以及物体表面、自由液面、海底和无穷远处的边界条件。单位波幅入射波的速度势可以表述为
(1)
式中:φI为入射速度势;φd为绕射速度势;φj为j自由度运动引起的辐射速度势;xj为j自由度上的运动;ω为入射波圆频率。
1.2 Morison方程
自升式平台桩腿的弦杆、水平杆、斜撑杆等构件的直径与波长的比值小于0.2,属于细长柱体。根据Morison方程,作用在单位长度细长柱体上的波浪载荷可以表示为

(2)
式中:Cd为拖曳力系数;D为特征直径;uf为垂直于细长柱体方向的水质点速度;us为垂直于细长柱体方向的结构运动速度;CM为惯性力系数;A为细长柱体的横截面积;ρ为流体的密度。
1.3 时域运动方程
在多种外部环境载荷作用下,自升式平台在系泊定位状态时的运动响应方程可以表述为
(3)

2 模型与环境参数
2.1 平台主要参数
本文以TZ 400自升式平台为计算模型,平台主要结构包括近似三角形的箱型船体、悬臂梁结构以及桁架式桩腿,桩腿的下端为碟形的桩靴。平台各部分的主要参数见表1。

表1 平台主要参数 m
TZ 400自升式平台主船体艏艉两端各有2个定位锚,可用于平台在就位下桩时进行精确定位。锚及系缆的布置形式如图1所示,系缆参数见表2。

图1 自升式平台系泊形式

表2 系缆参数
2.2 坐标系统
在建立平台模型的过程中,定义如下坐标系统:坐标原点位于船艉、船体底部基线以上5.4 m的位置,x轴正向由船艉指向船艏,y轴正向由船中指向左舷,z轴正向竖直向上。
2.3 三维水动力计算模型
在上述定义坐标系的基础上,建立自升式平台的计算模型。TZ 400自升式平台主船体和3个碟形桩靴采用面单元Shell 63建立其计算模型,如图2所示。桁架式桩腿采用杆单元Pipe 59建立其计算模型,如图3所示。图4为自升式平台整体水动力计算模型。

图2 面元模型 图3 Morison模型 图4 整体模型
2.4 环境参数
为保证自升式平台就位过程安全进行,所选取的海况窗口一般都相对良好。本文选取的海况参数见表3。在计算作用在Morison单元上的波浪力时,拖曳力系数和惯性力系数的选取对计算结果有较大影响[7],但目前为止对两参数的选取尚无明确的规定。《CCS海上移动平台入级规范2012》中规定:圆形截面杆件Cd的取值为0.6~1.2,CM取值为2.0;文献[8]提到对于细长圆形杆件Cd的取值为1.0,CM的取值为2.0。本文所选取的拖曳力系数Cd=1.0,惯性力系数CM=2.0。

表3 海况参数
2.5 计算工况
自升式平台在拖行过程中,为了降低平台的重心,一般都会将桩腿下放一定长度,虽然增加了拖行阻力,但降低了拖行过程中的风险,当平台到达指定位置后继续下放桩腿。为此,从桩腿下放15 m时开始计算(此时桩靴下表面至到海面的距离为20.4 m),桩腿下放长度每增加10 m计算1次,直至桩腿下放长度达到85 m。此外当桩靴下表面到达海底3 m时再计算一次,此时桩腿下放长度为91.6 m,共进行9种工况的计算,以此模拟平台桩腿下放的过程。
在利用AQWA软件进行水动力时域计算时,考虑波浪和海流分别以0°,30°,60°和90°方向入射,共进行36种工况计算,每种工况都进行3 h的计算模拟,数据采样间隔0.05 s。
3 结果分析
通过对36种工况的模拟计算,可以得到自升式平台在6个自由度上的运动时间历程曲线。本文主要对纵荡、横荡和垂荡3个自由度上的运动特性进行统计分析。
图5为波浪在0°入射时平台在一段时间内的纵荡运动时间历程曲线。图6为波浪在90°入射时平台在一段时间内的横荡运动时间历程曲线。可以看出:在系泊定位状态下,自升式平台在纵荡方向和横荡方向上会发生明显的大幅低频慢漂运动,随着桩腿下放长度的增加,平台的纵荡运动和横荡运动的范围明显变小。

图5 纵荡运动时间历程曲线

图6 横荡运动时间历程曲线
对平台纵荡运动和横荡运动的时间历程曲线进行快速傅里叶变换,得到平台运动过程中的纵荡运动和横荡运动的频率,其中,纵荡运动的峰值频率为0.031 6 rad/s,横荡运动的峰值频率为0.029 7 rad/s,平台在纵荡和横荡方向上的低频慢漂运动周期分别为198.835 s和211.555 s。在平台桩腿下放就位过程中须特别注意低频慢漂运动的影响。
图7和图8为在不同波浪入射角下平台纵荡运动和横荡运动平均位置随桩腿下放长度增加而变化的情况,可以看出:随着桩腿下放长度的增加,平台偏离初始位置的距离逐渐增大。这主要是由于随着桩腿下放长度的增加,作用在桩腿上的波浪力和海流的拖曳力逐渐增大。

图7 纵荡运动平均位置变化情况 图8 横荡运动平均位置变化情况
图9为在不同波浪入射角下平台纵荡运动2倍均方根统计值随桩腿下放长度的增加而变化的情况,可以看出:随着桩腿下放长度的增加平台纵荡运动幅值逐渐减小。
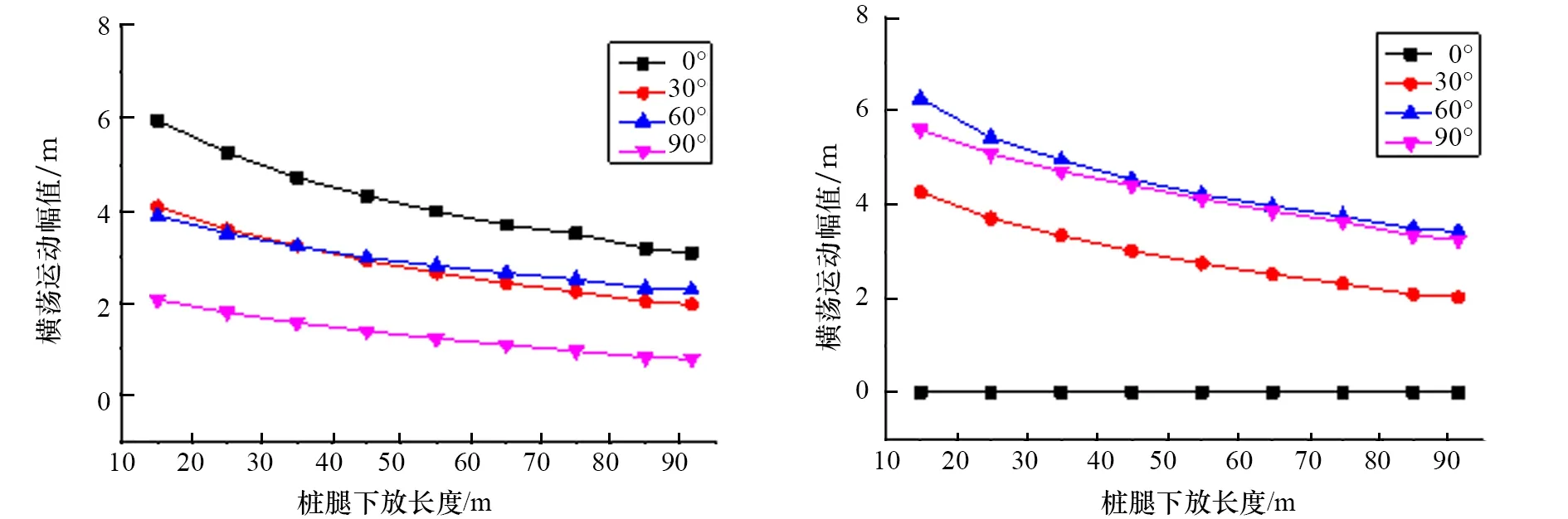
图9 纵荡运动2倍均方根统计结果 图10 横荡运动2倍均方根统计结果
图10为在不同波浪入射角下平台横荡运动2倍均方根统计值随桩腿下放长度的增加而变化的情况。由于平台左右对称,当波浪0°方向入射时其横荡运动幅度几乎为0。当波浪以其他角度入射时,横荡运动幅度同样随着桩腿下放长度的增加而逐渐减小。
图11为在不同波浪入射角下平台垂荡运动2倍均方根统计值随桩腿下放长度的增加而变化的情况,可以看出:当桩腿下放长度未达到35 m时,垂荡运动的幅度迅速减小;之后桩腿继续下放,平台的垂荡运动幅度也会逐渐减小,但变化很微小。统计结果见表4。

图11 垂荡运动2倍均方根统计结果

表4 平台垂荡运动2倍均方根统计结果
4 结 论
本文以TZ 400自升式平台为研究对象,利用AQWA水动力计算软件模拟分析了波浪入射方向和来流方向分别为0°,30°,60°和90°时,平台整体运动随桩腿下放长度的增加而变化的情况。通过对时域计算结果的统计分析,可以得出以下结论:
(1) 平台在系泊定位状态下在纵荡和横荡方向存在明显的大幅低频慢漂运动,慢漂运动的周期分别在198.835 s和211.555 s左右。为保证平台在桩腿下放过程中能够准确就位,需要不断调整系缆保证平台处于预定位置附近。
(2) 就位过程中随着桩腿下放长度的增加,平台偏离初始位置的距离逐渐增大,但变化相对平缓;在不同波浪入射角的情况下,平台偏离初始位置的程度不同。
(3) 就位过程中随着桩腿下放长度的增加,平台纵荡运动和横荡运动的幅度逐渐减小;在桩腿下放长度到达35 m以前,平台垂荡运动幅度会迅速减小,当下放长度超过35 m时,平台垂荡运动幅度变化微小。
[1] 罗宏志,蒙占彬.国内深水自升式钻井平台发展概况[J].中国海洋平台,2010,25(08):4.
[2] 何堃,唐友刚,邵卫东,等.自升式钻井平台就位过程桩腿触底分析[J].中国海洋平台,2012(02):41-46.
[3] 张兆德,王玉红,陈伟.沉垫自升式平台就位过程运动响应频域与时域分析[J].船舶与海洋工程,2016(01):1-6.
[4] 勾莹,沈洁,滕斌,等.自升式平台举升状态运动响应试验研究[J].中国海上油气,2011(04):279-281,284.
[5] 李龙祥,裴玉国,邵忠安.系泊自升式钻井平台运动响应试验研究[J].中国水运,2011,11(12):250-251.
[6] 竺艳蓉.海洋工程波浪力学[M].天津:天津大学出版社,1991.
[7] 马良.对莫里森方程中曳力系数C_D浅析[J].中国海洋平台,1998(03):16-18,45.
[8] KRENK S.Time-Domain Analysis of Frequency Dependent Inertial Wave Forces on Cylinders[J].Computers & Structures,2013,126:184-192.
