基于51单片机自控越障寻迹小车设计
2018-03-05胡云霄赵文宝安旭松
胡云霄,丁 颂,赵文宝,安旭松
(长春师范大学工程学院,吉林长春 130032)
根据全国大学生工程训练综合能力竞赛主题“重力势能驱动的自控行走小车越障竞赛”要求设计重力小车,其驱动行使的动能是由质量为1kg的标准砝码(钢制φ50mm×65mm)铅垂下降400mm来获得。并由除人工交互遥控外的机械或电控装置自动实现具有赛道障碍识别、轨迹判断及自动转向功能和制动功能,小车示意图如图1所示。为使小车在如图2所示的赛道中行驶,其分为平赛道和坡道,坡道位置位于直赛道中央,出发线在平赛道上,距离坡道起始位置大于1m,具体位置在两端直线、半圆弧切点处,赛道边缘设有高度为80mm的道牙挡板,并间隔不等(随机)交错设置多个高度约80mm的障碍板,其最小板间距为1m,每个障碍板从赛道一侧边缘延伸至超过中线130mm。本文中设计了一种机电结合的基于51单片机自控越障寻迹小车以满足竞赛主题要求。

图1 小车示意图
1 小车传动系统设计
砝码的重力势能转化为小车动能驱动小车前行,砝码重力势能一定,传动系统的转化效率越高,小车行驶的距离越远。本文设计的传动系统由齿轮、定滑轮、绕线轮组成,该系统用于进行运动传递和能量转换。
[指导教师]丁 颂(1984- ),男,副教授,博士,从事机械传动研究。

图2 赛道示意图

图3 滑轮传动简图
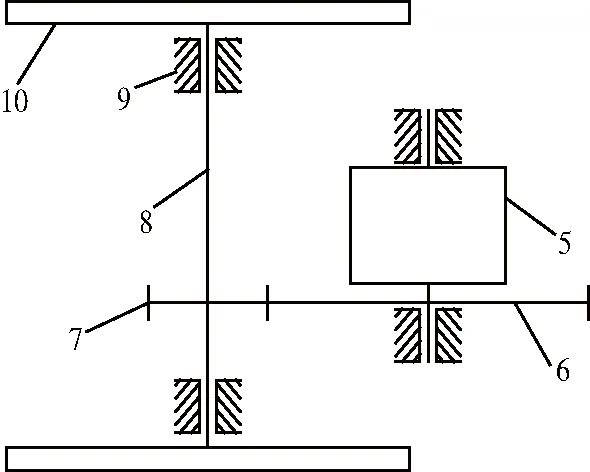
图4 系统传动简图
传动系统结构简图如图3和图4所示,其中,1和9为支撑,当砝码2下落时,重力势能通过绳子4经定滑轮3传到绕线轮5,以顺时针方向将绳子缠绕在绕线轮5上。随着砝码2的下落,绳子4带动绕线轮5以逆时针方向转动,使齿轮6、7以逆时针方向转动,后轮轴8和后轮10以逆时针方向转动,从而将重力势能转化成使小车向前行驶的动能,小车向前行驶。SolidWorks虚拟建模小车如图5所示。

图5 小车三维图

图6 转向控制系统结构
2 小车电控硬件设计
2.1 障碍检测模块
障碍检测模块为自控越障寻迹小车的主要模块之一,障碍检测模块要精准、高速地采集障碍物信息,选用E18-d50NK型光电开关作为障碍检测模块的检测元件,光电开关利用被检测物对光束的反射,由同步回路选通电路,检测物体有无。运用光电开关来检测小车到障碍物的距离,得到小车的位置信息,通过反馈控制使小车产生相应动作。
2.2 转向控制模块
主控模块通过反馈作用调用障碍检测模块检测到的位置信息,对其进行处理,通过改变STC12C5410单片机的PWM端口输出的脉宽调制输出信号控制舵机转角大小,实现对小车转向控制,改变小车的行驶方向,其控制结构图如图6所示。
2.3 硬件总体电路设计
控制系统是由信号输入装置、执行器和控制单元组成,本文是以STC12C5410单片机作为主控模块的主芯片,该控制系统由主控模块、障碍检测模块、转向控制模块等组成,总体框图如图7所示。

图7 系统总体框图

图8 系统总体电路
系统的总体电路如图8所示。分别选用P3.2引脚和P3.3引脚作为光电开光P6、P7检测小车位置信息的信号输入端口,光电开关P6、P7检测得到小车与障碍物的位置信息,经预处理通过信号输入端口进入STC12C5410单片机U1内部自带的A/D转换器,将模拟信号转换为数字信号,经处理后通过PWM产生一个可调的高低电平信号输出,输出信号通过单片机U1的P1.1引脚传送给舵机P5,调节舵机P5转角,控制小车的转向,ISP端口在本系统作为程序下载和在线调试。
3 小车控制程序设计
自控越障寻迹小车在前行过程中,单片机控制系统需要接收识别电路信号,采用PWM脉宽调制,产生一个可调高低电平信号,控制舵机的转角,从而实现小车转向。控制系统基于KeiluVision 4软件采用C语言编程,并采用模块化设计方法以便于程序调试。
主程序根据小车所处位置的不同,确定舵机的任务,使小车产生相应的动作。程序流程图如图9所示,当小车在赛道上行走时,系统对光电开关信号进行快速的判断处理,当距离等于25cm时,为可调的光电开关检测距离值,当距离小于25cm时,光电开关检测到障碍物灯亮,反之无障碍物灯灭,具体情况如下:左边光电开关灯亮右边灯灭,舵机右转120度;左边光电开关灯亮右边灯亮,舵机保持该时刻状态;左边光电开关灯灭右边灯亮,舵机左转60度;左边光电开关灯灭右边灯灭,舵机保持该时刻状态。

图9 程序流程图
4 结语
本文进行基于51单片机自控越障寻迹小车的传动系统、电控硬件和控制程序进行设计。实现小车靠重力势能转化进行动力驱动,51单片机自动控制小车的行进方向,实现自控越障寻迹平稳运行,达到预期效果。
[1]徐冰,印江,陈俊君.不完全齿轮与曲柄摇杆的无碳小车设计[J].实验室研究与探索,2016,35(2):59-61,134.
[2]吴新良,刘建春,郑朝阳.重力驱动的避障小车设计与制造[J].机械设计,2014,31(10):25-28.
[3]季元进,任利惠,顾建.利用变心齿轮传动的无碳小车的机构创新设计[J].机械设计,2014,31(3):71-74.
[4]张铮,张江宁,薛竹村,等.循迹避障灭火功能智能小车设计[J].实验室研究与探索,2016,35(11):141-145,205.
