基于智能相机的分拣技术研究与应用
2018-02-14谢超明
谢超明


摘要:针对传统分拣作业工业机器人采用示教编程方式程序不易修改、效率低的缺点,提出利用智能相机、PLC和工业机器人构建视觉识别系统,可以快速准确判断工件类型、位置等信息并提供给工业机器人实现智能分拣,提高了柔性和生产效率。
关键词:智能相机;分拣;视觉
中图分类号:TP242 文献标识码:A 文章编号:1007-9416(2018)10-0000-00
随着现代制造技术的发展,用人工视觉检查产品质量效率低且精度不高,用机器视觉检测方法可以大大提高生产效率和生产的自动化程度。尤其是在智能分拣系统中,机器视觉能快速准确的判断工件类型,位置等信息,并通过通讯将上述信息传递给PLC,从而控制执行系统工业机器人动作,是智能生产中非常重要的一个组成部分。本文基于信捷SV4-30mL智能相机,研究机器视觉在分拣技术中的应用。
1 系统硬件组成
通过Modbus-TCP通讯协议实现智能相机、PLC和工业机器人之间数据和信号交换,把相机识别的工件类型、位置等特征数据传递给中央控制器,控制工业机器人产生相应的分拣动作。
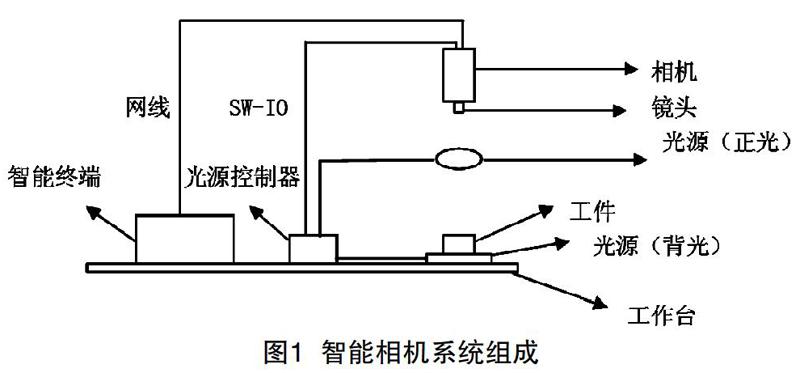
视觉识别系统由智能相机、镜头、光源控制器、光源等硬件组成,如图1所示。相机选用信捷SV4-30mL系列,为智能化一体相机,通过内含的CCD/CMOS 传感器采集高质量现场图像,内嵌数字图像处理(DSP)芯片,能脱离PC 机对图像进行运算处理,PLC 在接收到相机的图像处理结果后,进行动作输出。
相机连接时,用交叉网线连接相机RJ45 网口与编程电脑,用SW-IO串口线连接相机DB15串口与电源控制器。
光源采用背光方式即光源在工件下面,当工件运行到相机下方拍照工位时,可以通过PLC程序利用手动或者自动方式给光源控制器输入端一个触发相机拍照。
2 相机软件设定
根据相机固件对上位机软件 X-Sight STUDIO进行设定,选择相应的软件版本并确定相机站号。通过焦距调节图像的清晰度,通过光圈调节图像的亮暗,从而使软件窗口界面能清楚获得工件轮廓形状。
2.1 相机学习
连接相机后,在相机下方放置需要识别的物体,在放置物体的时候,尽量将物体放正,如果工具是矩形物体,使其两条边与相机坐标系平行,以提高相机精度。利用图案定位工具对工件样本进行学习,每个图案定位工具都自带有一个学习框,选中要识别的物体的几何特征,然后点击“学习”选项,完成后相机就具有了识别框中物体的能力。根据识别要求通过图案工具参数可以调节相似度阈值和目标搜索最大个数及目标搜索角度,如图2所示。
2.2 脚本编辑
如果是一次识别多个物体,计数工具的输出结果如“目标的重心坐标集合”可以用动态数组表示,如对于不同类型的工件依次完成相机学习后,通过脚本程序将坐标信息收集到一个数组中,完成输出。添加变量工件类型WpType、工件品质WpQ、孔数WpHoleNum等,通过脚本程序可以判断工件类型、坐标及是否为合格品等信息,部分脚本程序如下:
tool6.WpQ = 0; //工件是否合格(0=不合格 1=合格)
tool6.WpType = 0;
if(tool3.Out.objectNum > 0 )
{
tool6.WpType = 3;
if(tool5.Out.targetGroupNum == 3)
{
tool6.WpQ = 1; //合格
}
tool6.WpH=20;
tool6.WpX=tool3.Out.centroidPoint[0].x;
tool6.WpY=tool3.Out.centroidPoint[0].y;
tool6.WpA=tool3.Out.centroidPoint[0].angle;
}
2.3 Modbus配置输出
通过Modbus配置将智能相机拍照数据按照相机存储地址依次输出,如图3所示。根据相机采用外部X0端口触发相机拍照,并通过Y4发出拍照完成信号,修改智能相机作业配置触发方式为外部触发,通过软件界面“一键下载”将程序下载到相机。切换到“相机”界面,可以看出“仿真”与“相机”界面结果一致。
图3 Modbus配置输出
2.4 PLC程序处理
由于相机与PLC处理的数据类型不一致,如相机拍照获得的数据单位是像素,与实际尺寸之间需要通过相机系数进行转换。可以在西门子博途软件中编写相机通讯、相机运行、工件类型转换、数据转存等程序块,完成数据处理才能将智能相机拍照获得的有效信息如工件类型、坐标、旋转角度等传递给PLC,同时需要编写机器人程序实现对相机数据的调用从而实现工業机器人对不同类型,不同位置的产品进行智能分拣。
3 测试
编写视觉系统人机界面,可以将工件信息包括位置、角度和工件编号等显示在触摸屏HMI上,如图4所示。通过实验证明,智能相机系统能够快速的完成拍照并显示工件信息,工业机器人能准确的完成分拣作业。
4 结语
本文基于智能相机系统,通过系统硬件设置、相机学习、脚本编写、Modbus配置输出及PLC程序编写,能快速准确完成对工件信息的提取并传递给主控PLC从而控制工业机器人完成分拣,并通过相机学习和脚本程序可以实现残缺件的识别,提高生产的柔性和自动化程度,对于产品的智能分拣有着非常重要的意义。
参考文献
[1]李相旭.机器视觉检测系统关键技术研究[D].天津:天津科技大学,2014.
[2]王玉萍,郭峰林.基于机器视觉的PCB板缺陷检测系统关键技术研究[J].科技通报, 2017,33(1):101-105.
[3]凌双明.汇博机器人视觉系统在工件分拣中的应用[J].长沙航空职业技术学院学报,2017,(03):96-99.
[4]吴继方.浅谈机器视觉技术在自动化制造业中的应用[J].山东工业技术,2016,(11):235-235.
[5]王诗宇,林浒,孙一兰,王品.基于机器視觉的机器人分拣系统的设计与实现[J].组合机床与自动化加工技术,2017,(3):125-129.
Research and Application of Sorting Technology Based on Smart Camera
XIE Chao-ming
(College of Mechanical and Electrical Engineering, Hubei Vocational and Technical College, Xiaogan Hubei 432000)
Abstract: In view of the shortcomings of the traditional sorting operation, the industrial robot adopts the teaching programming program, which is difficult to modify and low in efficiency. It is proposed to use a smart camera, PLC and industrial robot to construct a visual recognition system, which can quickly and accurately judge the type and position of the workpiece and provide it to the Industrial robots achieve intelligent sorting, increasing flexibility and productivity.
Keywords: smart camera; sorting; vision
