波特率自适应的CAN驱动在嵌入式Linux下的实现①
2018-02-07史小燕朱建鸿
史小燕,朱建鸿
(江南大学 物联网工程学院,无锡 214122)
控制器局部网(CAN-CONTROLLER AREA NETWORK)是BOSCH公司推出的一种多主机局部网[1].它是一种非常有效的分布式控制串行通信网络,并且具有传输速度快、可靠性高、通信方式灵活等特点,因此在工业控制现场被广泛应用[2].CAN总线工作时要求通讯双方波特率一致,实现CAN波特率自适应将有效提高CAN总线的灵活性和使用效率.本文实现了一种基于嵌入式Linux的波特率自适应方法,该方法通过融合直接测量法和波特率表轮询法来加快波特率的配适速度;同时,加入波特率优先级的概念,保存用户选择数据并将其利用到波特率初始值设置中,增加了一次性命中正确波特率的概率.
1 CAN总线硬件平台介绍
硬件平台采用三星S3C2410芯片作为系统微控制器.CAN总线规范定义了OSI模型的数据链路层和物理层.这两层通常由CAN总线控制器和CAN总线收发器实现[3].本文CAN总线控制器和收发器分别采用Microchip的MCP2510和Philips的P82C50,二者通过SPI总线实现与控制器的数据传输.
S3C241X系列是由Samsung公司设计生产的低功耗,高集成微处理器芯片,能够对WINCE,EPOC32,LINUX系统提供支持.芯片接口资源丰富,可通过SPI同步串行接口和MCP2510相连.MCP2510是带有SPI接口的CAN总线控制器,支持回环、正常、监听、睡眠、配置5种工作模式,满足CAN总线使用需求.P82C50是Philips公司生产的can总线收发器,芯片作为CAN控制器与物理总线间的接口,提供对总线的差动发送和接收功能.当使用P82C50作为CAN收发器时,同一网络中允许挂接110个节点.CAN收发器,控制器与微控制单元之间的关系如图1所示.
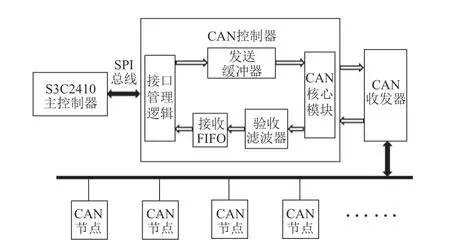
图1 CAN总线器件示意图
2 Linux下CAN驱动软件结构
Linux设备驱动是硬件设备和应用程序之间的接口,它为用户提供了统一的设备访问方式.Linux内核一般把驱动程序分为4种类型,而CAN总线设备属于其中的字符型设备,它以设备文件的方式建立在文件系统中的/dev目录下,并且可以像文件一样被访问[4].
Linux下设备驱动程序可以以模块的形式动态的加载和卸载,字符设备驱动程序一般包含5个部分:头文件、file_operation结构体变量、中断函数、加载函数以及卸载函数.file_operation结构体变量存储驱动内核模块提供的对设备进行各种操作的函数的指针,该结构体的每个域都对应着驱动内核模块用来处理某个被请求的事务的函数的地址.<linux/fs.h>对file_operations数据结构中各个变量做了详细定义[5].当用户调用如open(),read()等API接口时,系统将参数传递给file_operation结构体的成员函数,最终获得参数实控权的将是系统调用函数.
加载函数以及卸载函数为驱动提供了动态使用模式,系统通过调用module_init()来加载驱动,通过调用module_exit()来卸载驱动.module_exit()只在动态编译时有意义,因为静态加载时驱动已经被编译进内核,无法进行卸载.
中断函数即中断服务程序,它响应系统中断并作出相应的处理.本文所设计的波特率自适应方式就是通过中断服务程序来实现.Linux中断处理程序可以分为上半部和下半部[6].上部中断处理紧急中断任务,它应该尽量短小简单以便程序能迅速处理完中断并及时返回.底部中断用来处理较长的非紧急任务,linux2.6版本内核提供了三种底部中断处理方式:softirq、tasklet和work queue.tasklet和softirq都是基于软中断机制实现,而work queue则是依靠内核线程实现.这三种处理方式各有优缺点,如果专注性能提高应使用softirq,对底部中断处理的调度有特殊要求则必须使用work queue,除此之外,最优选择tasklet处理方式.
3 波特率自适应CAN驱动软件设计
CAN波特率自适应的一般方法有两种:轮询法和探测法.本方案将结合这两种常用检测法来设计自适应CAN驱动.
轮询法即将常用波特率记录进一张波特率轮询表中,然后将测试波特率按序填入CAN驱动,通过判断能否正确接收CAN数据帧决定是否进行下一次轮询.
探测法即对接收数据进行采样,通过采样数据来获得正确波特率.由于CAN波特率有一定容错空间,所以当MCU自带捕捉功能时,即使采样波特率有一定误差,很大程度上也能获得正确波特率.
这两种方法各有利弊,前者可以保证在波特率表范围内找到正确值,但因为要对数据依次轮询,所以往往耗时较长.后者虽然时耗短,但对设备有特殊要求,且如果偏差值超过波特率容错范围,则会造成无法获得正确波特率的错误.基于此本文将两种方法相结合,实现一种平均耗时短、匹配成功率高的波特率自适应CAN驱动.
3.1 CAN控制器MCP2510
MCP2510是一款独立CAN控制器,它的存在大大降低了软件开发的难度.MCP2510具有8个中断源,寄存器CANINTE是中断使能寄存器,它包含了各个中断源的中断使能位;寄存器CANINTF是中断标志寄存器,它包含了各个中断源的中断标志位.寄存器各个位设置如表1所示.
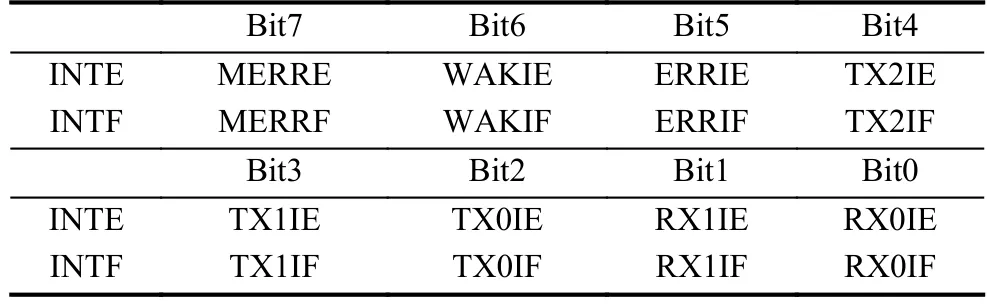
表1 中断寄存器CANINTE,CANINTF
Bit0–Bit1:接收中断位.MCP2510有两个接收缓冲寄存器,缓存器0和缓存器1,驱动将接收数据读入这两个寄存器再传递进用户层.在这两个位使能的情况下,若RX0IF置位,则缓存器0已满;若RX1IF置位则缓存器1已满.
Bit2–Bit4:发送中断位.MCP2510有三个发送缓存器,缓存器0,1和2.在这三个位使能的情况下,若TX0IF置位,则发送缓存器0是空;以此类推.
Bit5–Bit6:错误中断位和唤醒总线活动位.
Bit7:报文错误中断位.如果报文发送和接收过程中发生错误,将触发该位中断.该中断功能在与监听模式联用时被用来加快波特率的确定.
MCP2510提供五种工作模式:配置模式,正常模式,睡眠模式,监听模式,回环模式.这五种模式通过设置CANTCRL寄存器的值来切换,其中波特率必须在配置模式下才能成功设置;CAN总线的通信运行在正常模式下;监听模式仅接受数据帧而不能发送数据,应该在该模式下进行波特率自适应.
3.2 波特率自适应软件原理
本文所使用的硬件平台将外部中断4作为CAN专用中断引脚,SPI 总线将差分信号传输到 MCU 的外部中断引脚,驱动对该中断做出一系列响应从而得到传输数据.首先对MCP2510 的CANINIE进行设置,使能中断.当信号来临时会根据相应中断对中断标志寄存器进行设置,在中断服务程序中读取CANINIF寄存器的值并进行判断,完成中断响应.通讯双方波特率相匹配时,中断服务程序将会设置工作模式为正常模式并接收数据;波特率设置有误时,中断服务程序将会设置工作模式为正常模式并进入波特率自适应阶段.
在波特率自适应阶段,驱动首先对数据进行采样以获得预判波特率.中断触发方式有边沿触发和电平触发,边缘触发分为高电平触发和低电平触发.驱动中可调用set_irq_type函数对触发方式进行设置,do_gettimeofday函数可在高低电平触发时分别获得一个当前时间值.do_gettimeofday是系统函数,用户层函数gettimeofday实际调用的便是该函数,它可以实现微秒级的时间获取.将获得的当前时间与前一次获得的时间相减并不断比较可获得一个最小时间差Tmin.由于CAN总线采用反向不归零编码(NRZ),该种编码方式采用位填充的方法确保至少每6位时间发生一次跳变,即Tmin可以是实际码元长度的1–5倍.从提高驱动效率的角度出发,实际出现长时间不跳变的情况较少,所以本文仅考虑Tmin就是实际码元长度的情况.
获得预判波特率以后即使用该波特率进行测试,若再次进入报文错误中断,则依据该波特率所在位置对其周围波特率进行左右轮询直至波特率最终匹配成功.波特率自适应流程图如图2.
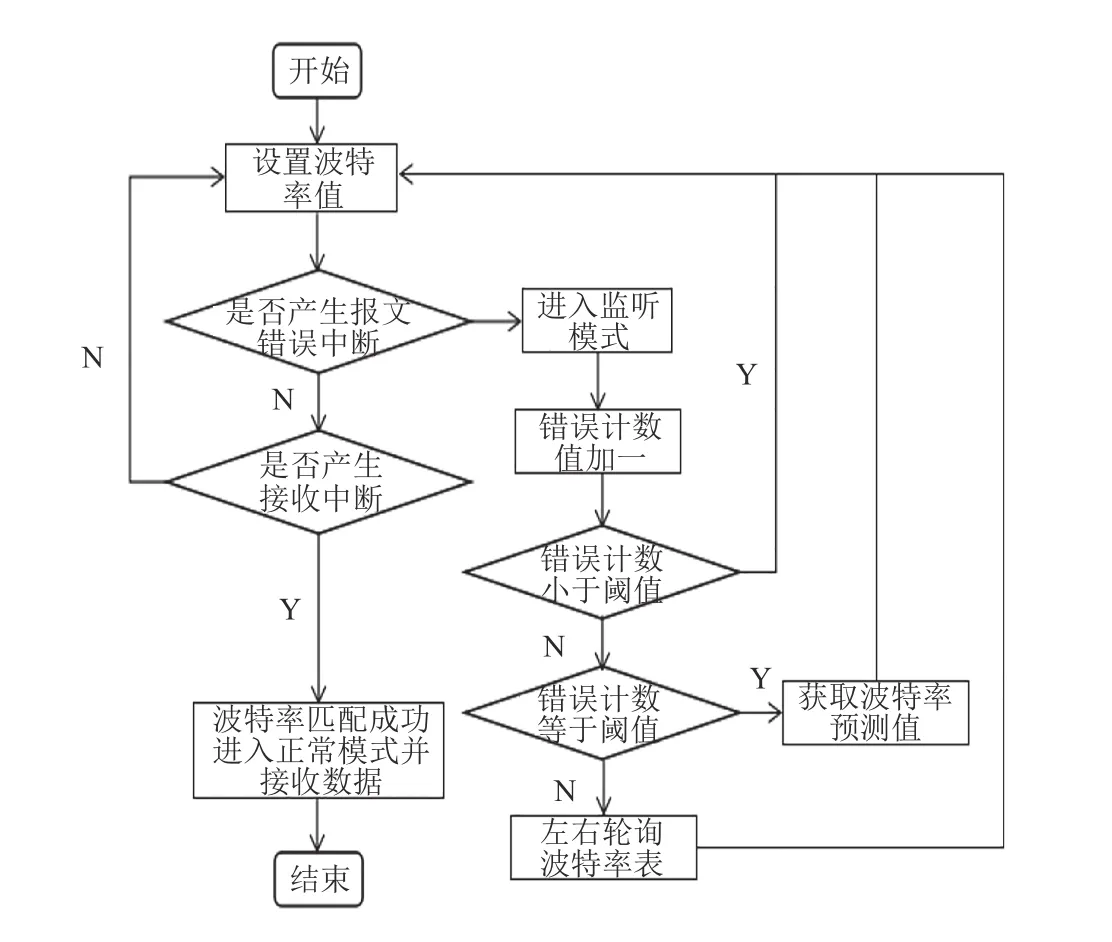
图2 CAN波特率自适应流程图
当产生报文错误中断后,首先获取波特率预测值并对该波特率进行测试.该预测值往往有一定的误差,将波特率表中的各值之间的中间值作为判定该值的边界,可使获得的波特率归束到波特率表中存在的值中.若再次进入报文错误中断,则进行波特率轮询.确定该波特率在波特率表中的位置,根据错误计数值的奇偶性向左右两个方向进行轮询,即一回合向左,下一回合向右.若一方先达到边界值,则专注向另一方向轮询直至找到正确值.轮询部分交由Linux底部中断完成.波特率匹配成功后进入接收中断,对CANINIF寄存器的接收缓存标志位进行问询,若缓存器0,1有空闲空间,则读取数据;若缓存器满,则唤醒等待队列,将数据传递到用户层.在中断服务程序执行完毕后,需要手动清除中断标志位,否则中断会一直响应陷入死循环.清除中断标志位最好使用按位清除的方式,以防未被响应的中断标志被一并清除.
3.3 用户优先级的设置
CAN波特率的设置与距离有关,波特率越高,能够稳定通信的距离越短.即在距离一定的情况下,往往波特率的设置区间也受到了一定的限制.CAN总线在不同波特率下允许的最大通讯距离是:6.7 km(10 Kbps)、1.3 km(50 Kbps)、620 m(100 Kbps)、530 m(125 Kbps)、270 m(250 Kbps)、130 m(500 Kbps)、40 m(1Mbps)[7].在CAN驱动中,波特率初值固定地设置为波特率表的第一个值,这对于波特率自适应来说是一种资源的浪费.基于此,本文将用户使用频率的影响添进波特率初始值的设置,增加了一次碰撞即可获得正确波特率的概率,提高了波特率匹配效率.
用户数据需要具有能够反复读取、即使驱动关闭也能继续存留数据的功能,因此仅将其作为变量写入驱动是不够的.在本方法中用户数据被写入文件,在驱动打开时读入数据,接收中断里进行优先级判定,驱动关闭时保存数据.驱动层调用读写程序之前需要使用set_fs()函数对内核空间进行保护.
用户数据中保存一个二维数组,该数组放置了波特率表中的各波特率及其所属优先级,程序每进入一次接受中断,证明该次波特率匹配成功,对该波特率进行判断并将其对应的优先级增加1,再进行排序后便可获得一个新的波特率优先级表.该表存放在一个掉电不擦除的目录下,每次初始化时读取到驱动中的数组里,使用后在关闭驱动时原路保存.
4 实验结果分析
本设计方案为用户设定了16个常见波特率,满足一般情况下的通讯需求.通过实验平台串口调试功能检测驱动运行情况,驱动初始化阶段打印优先级信息,userlist是波特率枚举值,priority为对应优先级信息.用户层运行CAN数据收发程序,进入波特率调试阶段,驱动首先获得波特率探测值再根据该值进行轮询.
图3首先以十六进制形式向ARM开发板发送一组随机数据AA 76 07 54 65 34 53 55,成功匹配波特率后顺利接收;然后ARM端向PC端发送如图4所示三组数据.
图4接收数据为ASSIC码转换而成.经过测试,本文所设计CAN驱动匹配时间基本维持在3秒以内,而仅使用轮训方式匹配波特率会有首尾波特率轮询时间差距大的情况出现,如文献[6]中波特率自适应时间从4 s到12 s时间不等.且本设计增加了用户选择频率的影响,当所设置波特率为常用波特率时,有很大几率会一次命中正确波特率.在实际实验中,当用户优先级第一的波特率被选中时,匹配时间会被缩短到1 s以内,驱动能够在毫秒级时间内完成波特率匹配,这进一步提高了波特率匹配效率.
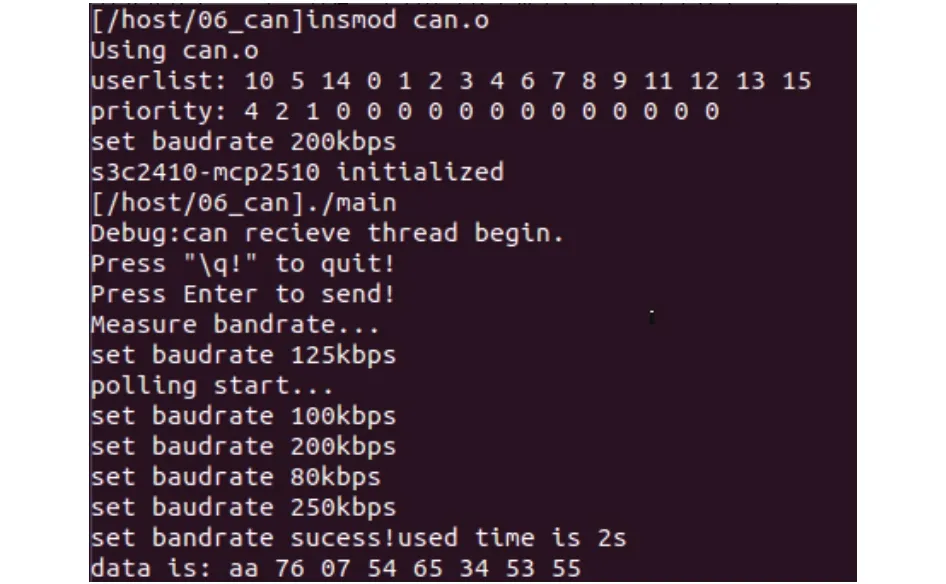
图3 驱动匹配测试图

图4 驱动数据收发测试图
5 结语
本文在对CAN驱动结构进行分析的基础上设计了一款可以实现CAN波特率自适应的驱动.以S3C2410微处理器为主控制器、MCP2510芯片为CAN控制器的嵌入式设备为实验硬件平台.设计方案融合了两种常用波特率自适应方法并增加了用户使用频率对波特率自适应的影响,文章对这部分内容进行了详细的解释.经过实验验证了该方案比原本的方法耗时更短,该驱动正常工作时数据能正确传输.
1 冯军,王耀南,刘宏立.Linux系统下CAN总线通信的设计及实现.微计算机信息,2008,24(32):71–72,81.[doi:10.3969/j.issn.1008-0570.2008.32.031]
2 田小刚,蔡启仲,邬军伟.基于嵌入式Linux下CAN设备驱动程序设计.微计算机信息,2009,25(17):155–157.
3 黄辉,范霁月,张明.CAN总线接口设计与应用.轻工科技,2013,(1):61–62.
4 陈在平,许东辉.Linux下S3C2440微控制器的CAN驱动设计与实现.化工自动化及仪表,2011,38(8):985–988.
5 张雪松,王鸿磊,徐钊.嵌入式Linux2.6内核的CAN驱动设计与实现.计算机工程与设计,2010,31(15):3396–3398,3426.
6 曾祥文,宋树祥,宾相邦.嵌入式Linux下波特率自适应的CAN总线驱动的实现.测控技术,2015,34(8):104–107.
7 谢云山,杨安种,龚建宇,等.自适应CAN总线波特率转换器设计.自动化与仪器仪表,2013,(5):62–63.
