驾驶员头部运动与换道意图的分析研究
2018-01-25黄贤丞唐阳山李栋梁
黄贤丞,唐阳山,李栋梁
(辽宁工业大学 汽车与交通工程学院,辽宁 锦州 121001)
前言
驾驶人头部位置及头的转动方向都会影响驾驶人的视线方向。研究表明在视线搜索过程中,头部运动在时序上先于眼睛运动2s[2]。因此,在驾驶人的视觉行为特性的研究当中,对头部参数的研究是优先考虑的。驾驶人头部位置参数较多,本文只对转动参数进行研究,分析头部水平方向的转动角度。采用高倍摄像头对驾驶人头部进行跟踪拍摄,通过对录像分析,逐帧分析每幅画面中的注视点位置,进而确定每个注视点所对应的注视目标。
1 头部姿势估计
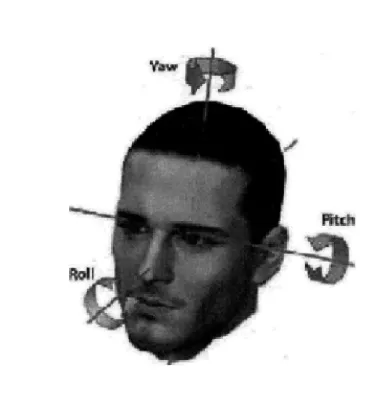
图1 头部三维标示
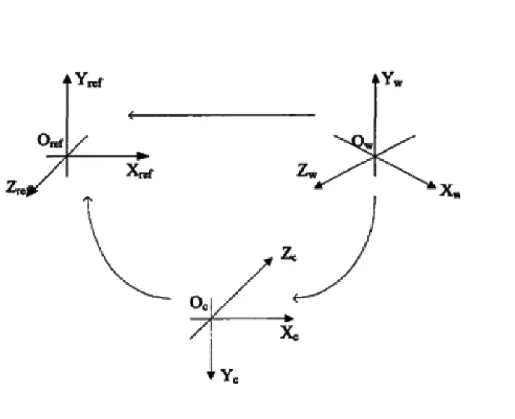
图2 三维头部转换过程图
利用摄像机对头部运动进行拍摄和检测,在三维世界中表示出人体头部的位置和角度,即通过采集人体面部图像,并设为参照,利用POSIT算法,将提取的待测图像的特征点信息进行迭代估计,得到了头部相较于标准正面头部姿势的三个自由度,获得头部姿势估计[4]。
驾驶人头部位置参数较多,本文只对转动参数进行研究,分析头部水平方向的转动角度就,即图中yaw方向。
2 头部姿势特征分析
2.1 头部转动姿势
基于驾驶人注视兴趣区域的划分,结合实际情况分析,头部转动姿势可分为前向,左向和右向,这里借鉴眼部注视的区域划分,对头部转动的区域和角度进行划分。
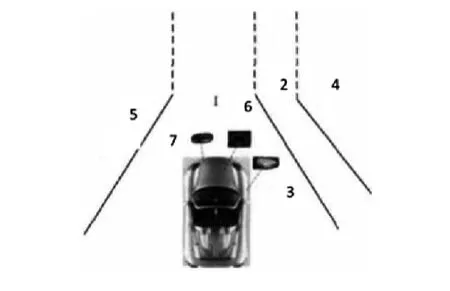
图3 驾驶员注视范围

图4 驾驶员头部转动区域
头部转动区域中,1—前向区域,2—左向区域,3—右向区域。
2.2 头部姿势保持时间
驾驶人对交通环境(如道路、行人情况、车流信息)进行信息观察时,会产生注视时间,相应的会产生头部姿势保持时间,下图可以看出,头部姿势在左向、右向保持时间百分比要小于前向区域,但是比例都是超过 60%,说明驾驶人观察道路环境时,头部姿势的保持和观察是主要方式。也就是说,驾驶人在换道的过程中需要对交通情况进行包括安全性和可通过性评估,也就是需要通过头部姿势的保持专注观察,但是还需要摆动头部关注如后视镜、相邻车道等的情况,导致减少头部姿势的保持时间。
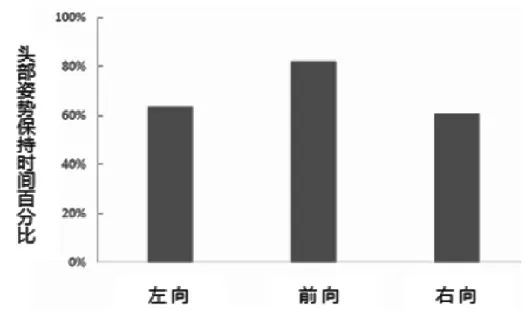
图5 不同行驶阶段头部姿势保持时间
2.3 头部转动次数
头部转动次数指的是单个样本时间段头部转动落在某个区域的次数,该指标反映的是驾驶人对某一区域关注的频繁程度。通常注视次数越多,表示驾驶人观察的目标物越多,分配到每个目标物上的注意力越少。箱线图给出了不同意图阶段的总注视次数的分布情况。
可以看出,左、右换道意图阶段的头部姿势保持次数分布范围较广,中位数以上数据显著大于车道保持阶段。左、右换道意图阶段的头部姿势保持次数平均值约为6次,而车道保持阶段为4次。分别对左、右换道意图阶段和车道保持阶段的头部姿势保持次数进行独立样本T检验,P值分别为0.003和0.005,均小于0.05,说明不管是左换道意图阶段还是右换道意图阶段都和车道保持阶段的头部姿势保持次数存在显著差异。
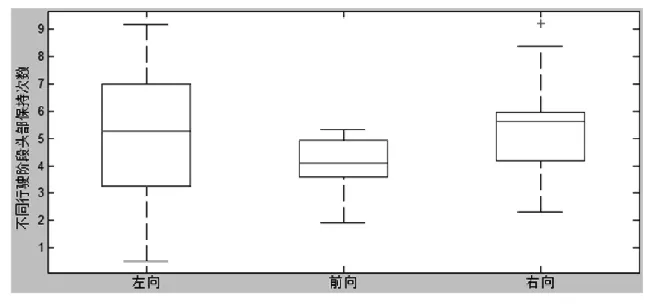
图6 不同行驶阶段头部保持次数
3 数据预处理和正态性检验
样本实验中无可避免会出现异常值,去除异常值的意义有利于提高检查结果的准确性和精度。实验过程中的驾驶人的一些随机动作,有可能会导致异常数据的产生。
这里采用拉伊达法则法则进行数据预处理,基本思想可表示为:|xi-¯x|>3δ,即当样本中的测量数据xi与其测量结果的均值¯x之差的绝对值大于3δ(标准差δ)时,该数据就是异常值。拉伊达法则法则操作简单,理论清晰。
通过研究头部转动角度的均值与方差,证明头部转动角度能否应用于驾驶员换道意图的判断。对数据进行正态性检验,这里利用matlab中Statistics Toolbox工具箱函数进行处理,基于概率纸检验正态分布的原理,对样本观测值进行由小到大的次序排列:X(1)≤X(2)≤…≤X(n),将(X(i),(i=1,2….n)进行概率纸处理可以观测:
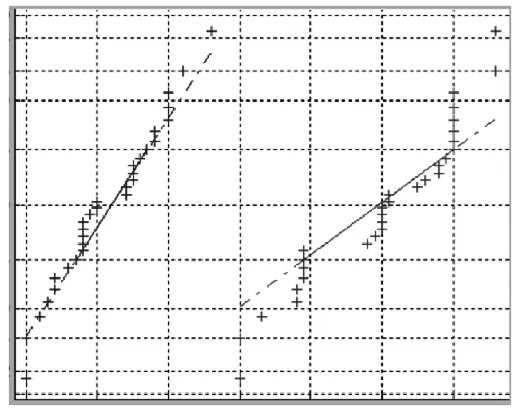
图7 正态概率纸检验
从结果来看,这些点明显接近一条直线,所以说这些观测值的为正态分布是适当的[3]。
4 头部水平方向转动角度标准差
为驾驶人头部水平方向转角标准差的分布情况,车道保持阶段的样本的标准差分布较为集中,且大都在分布在 5°以下,说明在车道保持阶段驾驶人头部在水平方向上转动较平稳;左换道意图阶段的水平方向转角标准差的平均值为9.14 0,右换道意图阶段为10.52 0,车道保持阶段为1.83 0,可以看出不论是左换道意图阶段还是右换道意图阶段,驾驶人水平转角标准差总体分布都大于车道保持阶段,说明换道意图阶段,驾驶人通过头部转动进行视觉补偿观察交通情况。
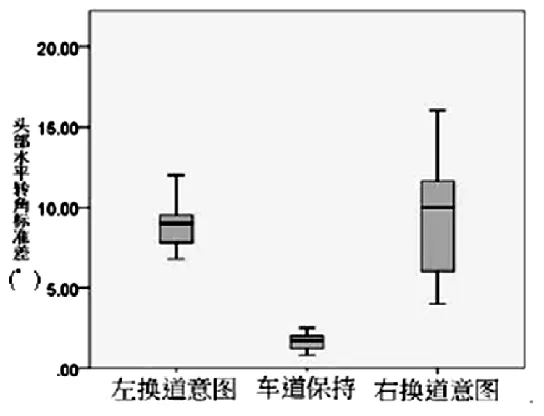
图8 驾驶人不同行驶意图头部运动标准差
进一步对比发现,右换道意图阶段的分布比左换道意图阶段更分散,这主要是因为左、右后视镜相对于驾驶人位置的差异性造成的。进行独立样本T检验,p(L&S)=0.004<0.05,p(R&S)=0.001<0.05,说明换道意图阶段和车道保持阶段的驾驶人头部水平方向转角标准差存在明显差异。驾驶人头部水平方向转角标准差可以作为表征驾驶人换道意图的参数[5]。
5 结论
本文对驾驶员头部运动的姿势进行分析和视频分析,得到头部姿势估计,然后对驾驶过程中的头部转动进行区域划分,对视频采集的数据进行预处理和独立样本T检验,得到表征指标,确定了头部运动姿势可以表征驾驶人换道意图的结论。为后续模型的训练提供支撑。
[1] 李航.统计学习方法[M].清华大学出版社,2012:187-188.
[2] Doshi A, Trivedi M M. On the Roles of Eye Gaze and Head ynamics in Predicting Driver's Intent to Change Lanes[C], IEEE Transactions on Intelligent Transportation System, 2009, 10(3):453-462.
[3] 周洪伟.正态性检验的几种常用的方法[J].南京晓庄学院学报,2012(3):13-18.
[4] 邢世蒙.头部运动姿态检测分析与设计[D].西安工业大学,2015年.
[5] 杨诚.基于隐马尔可夫理论的驾驶人换道意图识别研究[D].吉林大学,2016.
