玉米茎秆粉碎机悬挂装置设计
2018-01-06陈丹阳马跃进郝建军赵建国李建昌杨欣闫棠
陈丹阳+马跃进+郝建军+赵建国+李建昌+杨欣+闫棠


摘要: 为研制茎秆粉碎机前置穗茎兼收型自走式玉米联合收获机,保证割台和茎秆粉碎机可以互不干扰的进行工作,且能在一定范围内运动以达到合适的离地高度;利用三维设计软件的建模以及分析功能,设计茎秆粉碎机的悬挂装置;通过运动仿真和应力分析,获得悬挂架受力最大位置的等效应力、位移、安全系数分布云图。结果表明,悬挂架设计合理,可以达到作业要求;最后通过样机试制验证了该设计的可行性。
关键词: 茎秆粉碎机;运动仿真;悬挂架;应力分析;悬挂装置;有限元分析
中图分类号: S225.5+1 文献标志码: A
文章编号:1002-1302(2017)22-0239-05
我国是农业大国,玉米是主要的粮食作物之一。2014年我国玉米年产量高达215 646 300 kg[1]。按产粮和茎秆比 1 ∶ 1.2 计算,每年约产生258 775 600 kg玉米茎秆[2]。茎秆处理方式大多以焚烧为主,安全隐患严重,然而玉米茎秆具有多功能性,可用作燃料、饲料、肥料、生物基料、工业原料、新型能源等,与人民的生活息息相关[3-4]。
目前,大部分自走式玉米联合收获机只收获果穗,将茎秆还田,少量的玉米收获机配置有茎秆回收装置,但是大部分只完成茎秆切碎作业,后续的运输和打捆仍需要占用许多劳力和时间。因此,在现有玉米收获机的基础上研制了可以集摘穗与茎秆粉碎与打捆功能于一身的多功能玉米联合收获机。茎秆粉碎机粉碎摘穗后的秸秆同时被其输送到打捆机的入料口处,但是它如何与机架连接,如何保证它在运动范围内有合理的运动轨迹,满足收获要求,成了必须要研究的课题。使用三维设计软件对悬挂架进行设计,通过运动仿真将悬挂架在运动过程中受力最大的位置直接输出到有限元分析(简称FEA),得到悬挂架的应力应变云图,通过修改设计参数,得到最佳结构尺寸,为进一步的优化设计提供基础。
1 整机
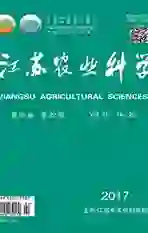
整机布置方案如图1所示。
茎秆粉碎机前置,避免了玉米茎秆受驱动前轮碾压而清除不净、碎茎秆含土量高等问题,实现穗、茎兼收且能做到果 穗与碎茎秆分别通过输送装置进入各自收集仓,将果穗收集仓的果穗装入果穗运输车,将碎茎秆直接输送到打捆机的入料处。
悬挂装置是茎秆粉碎机的关键部件之一,它连接着茎秆粉碎机与玉米收获机的机架,是茎秆粉碎机的固定基础,并承载着输送筒、风扇、减速箱、皮带轮等附件的质量。该设计主要针对茎秆粉碎机与玉米收获机架的连接。
2 茎秆粉碎机及悬挂架结构和工作原理
茎秆粉碎机包括碎茎秆输送筒、粉碎机悬挂臂、粉碎机悬挂支臂等,具体见图2。
茎秆粉碎机以前置悬挂安装连接方式安装在玉米联合收获机驱动前轮与果穗收割台之间,茎秆粉碎机下方设有顶出油缸,油缸通过悬挂架传递动力,使茎秆粉碎机能够在一定范围内旋转,达到最合适的离地高度。茎秆粉碎机通过发动机动力输出轮传递来的动力完成茎秆粉碎工作。割台与茎秆粉碎机间有安全限位装置,保证工作过程中的安全。
[FK(W15][TPCDY2.tif]
3 模型的建立
3.1 茎秆粉碎机模型的建立
建立茎秆粉碎机模型如图3所示。由于悬挂架承重主要为茎秆粉碎机自重,为了得到茎秆粉碎機的质量,为每个零件添加材料,茎秆粉碎机壳以及输送筒外壳均采用Q235A,刀轴以及绞笼轴采用45钢,刀片采用65 Mn,添加的材料属性见表1。其余零件使用软件材料库中的材料,电机、减速箱、皮带轮以及齿轮选用灰铸铁。通过软件分析功能得到茎秆粉碎机的质量为712 kg。
3.2 悬挂架模型的建立
3.2.1 悬挂架的设计
茎秆粉碎机通过悬挂装置与玉米联合收获机配套使用。由于茎秆粉碎机要进行回转运动,因而不能采用螺栓以及其他没有自由度的连接方式。设计采用矩管焊接的方式,茎秆粉碎机壳表面呈凹凸不平状,会使焊接更加容易。茎秆粉碎机与2根互相垂直的矩管焊接,整个机架与传动轴的轴套焊接(图3)。由于该机架还须要承载为减速器传递动力的皮带轮的小张紧轮的质量,因此设计了悬挂支臂,用来焊接连接小张紧轮的钢板,同时可以为悬挂臂分担载荷。
3.2.2 矩管挑选
材料采用矩形冷弯空心型钢,本设计选择尺寸为80 mm×40 mm×4 mm的矩管。在软件中添加悬挂架材料普通碳素钢Q235A[5],添加的所有材料见表1。
3.3 装配后模型
分别建立好2个部分的模型后,将2个部分装配到一起,装配完成后为各个部分定位。以茎秆粉碎机离地面距离最小时[CM(25]的位置作为定位基准,此时,油缸达到伸缩极限,油缸伸入
推杆25 cm,刀片离地3 cm。固定尺寸为最低的刀片距离悬挂架最低面25.5 cm、固定油缸的轴距离地面66.0 cm。由以上尺寸可以推断出当茎秆粉碎机处于最低位置时固定油缸的轴与悬挂架最低面距离37.5 cm。利用该三维软件检验尺寸的功能调整好距离,之后将安装轴套的轴和固定油缸的轴固定,为下一步的仿真做好准备。装配好的模型如图3所示。
4 运动仿真
对一个运动的零件进行有限元分析,首先须要知道它的受力,由于悬挂架和与它相连接的零件的相互作用在运动过程中不断变化,因此悬挂架受到的外力在运动过程中也不断变化[6]。虽然运动是一个连续的过程,但在该三维软件运动仿真模拟计算中将运动过程离散成了一定数量的时间点,可以对零件在每一个时间点进行有限元分析,或者对一个特定的时间点进行有限元分析[7]。
4.1 仿真前的准备
4.1.1 创建连接
该三维软件可以自动将约束转换为标准连接,转换后的标准连接有铰链(旋转)运动、平移、球面圆槽运动。
4.1.2 定义外部载荷endprint