基于虚拟样机的ATV转向系统优化
2017-12-28赵东升刘进伟严天雄朱明超
赵东升,刘进伟,严天雄,朱明超
(隆鑫通用动力股份有限公司,重庆400052)
基于虚拟样机的ATV转向系统优化
赵东升,刘进伟,严天雄,朱明超
(隆鑫通用动力股份有限公司,重庆400052)
针对某公司现有ATV产品存在的问题,运用虚拟样机技术建立了“前悬架-转向系统”动力学模型,结合转向系统设计相关理论对转向系统进行优化并获得优化方案。基于现有试验条件制定了合适的试验方案,经实车验证优化方案效果达到预期。
虚拟样机;ATV;转向系统;优化
某700cc排量ATV是某公司现有产品,专业评价人员认为该车转向困难。由于该车已基本设计定型,设计部门要求在尽可能少改动零件的前提下改善该车的转向性能,目标是该车的转向性能优于现状并接近竞品(同行业相近排量标杆产品)的水平。
1 基础理论
1.1 阿克曼转角误差
车辆低速转向行驶时,在可忽略轮胎侧偏角的影响情况下,为使车辆转向过程中车轮都尽可能保持纯滚动,转向内、外轮转角应该满足阿克曼转角几何关系[1]:
cotα -cotβ =K/L
式中:α是外轮转角,β是内轮转角,K是车轮主销中心线的延长线与地面交点之间的距离,L是轴距。
车辆转向时满足阿克曼转角几何的程度常用阿克曼转角误差(Ackerman Error)Δ来表征[2]。阿克曼转角误差定义:外轮实际转角与理想转角的差值。该误差越小,转向系统满足阿克曼转角几何的程度越高,一般要求在最大转角时该误差低于3°[3]。
根据图1几何关系,可以确定车辆最小转弯半径Rmin,Rmin表征车辆机动性能。设ε为主销偏移距,αmax为外轮极限转角,则αmax与Rmin关系满足[1]:

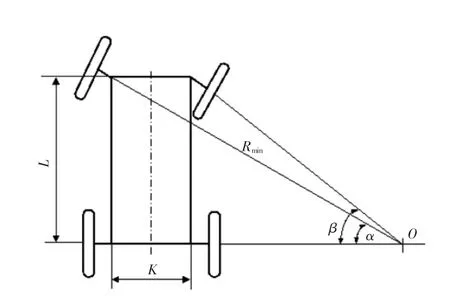
图1 理想阿克曼转角几何关系
1.2 转向系统基本设计原则
转向轮定位参数设置目的是:保证转向轻便、行驶稳定、防止轮胎磨损。这些参数主要包括:转向轮前束角δ,转向轮外倾角ε,主销后倾角τ及主销内倾角σ.转向系统与悬架系统是两套独立的系统,当把这两套系统作为整体分析时,它们的运动关系相互干涉[4]。转向系统的设计要尽量减小这种运动干涉,保证两套系统的匹配,减小车轮上下跳动时转向轮定位参数变化的范围,以保证转向性能稳定并减少轮胎的磨损。
2 建模仿真
2.1 多体模型建立
采用CAD软件建立的3D几何模型如图2所示。根据原状态ATV的相关几何坐标参数在ADAMS View中建立了“前悬架系统-转向系统”总成虚拟样机多体模型如图3所示。

图2 原始3D几何模型
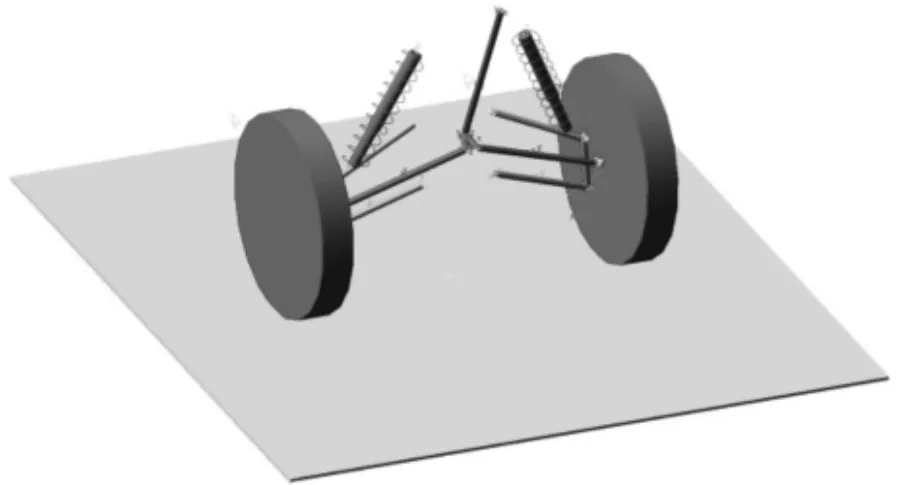
图3 “前悬架系统-转向系统”多体模型
该总成由转向系统和悬架系统组成。如图3所示,转向系统包括转向柱、转向柱下联板、转向拉杆;悬架系统包括转向节、轮毂、上摇臂、下摇臂和车架。各构件主要由运动副连接。试验台与大地由平移副连接可在竖直方向上滑动,车架与大地固联。
2.2 试验设计与仿真分析
2.2.1 原地转向试验设计
在进行仿真前模型简化假设如下:(1)模型中部件间运动副都视为理想运动副,内部无间隙及摩擦力;(2)零部件都视为不可变形的刚体。
第三,包容性和保护性。作为儿童福利制度的基础,困境儿童概念体系的建立,需要考虑到儿童保护的各个方面。尽量使用包容性的词汇,避免各种歧视性和排斥性的词汇。
对多体模型进行原地转向仿真,在转向柱上添加驱动以模拟转向柱由中心位置转动到某侧极限位置(0°~ 45°)的工况。
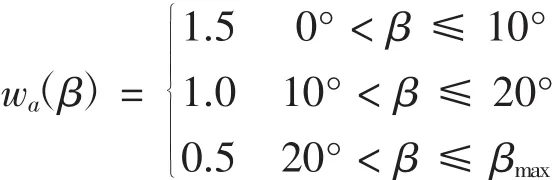
由cotα-cotβ=K/L可知,外轮的转角可由内轮的转角表示,理论外轮转角αβt可表示为:
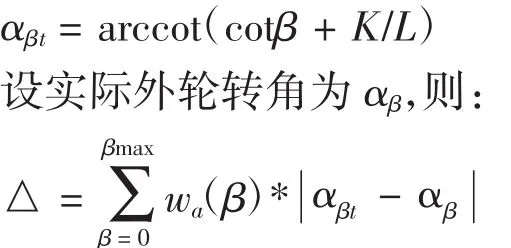
其中,wa(β)为权重系数。不同工况下对阿克曼转角误差要求也不同,一般在最常用的小转角以及车轮小幅跳动工况时应尽量小,而在不常用的大转角大幅跳动工况时,可以适当降低要求。对于wa(β),考虑到大部分工况下车轮转角都小于20°,并且10°以内的小转角使用频率较高,wa(β)可认为是分段函数:
2.2.2 车轮同步跳动试验设计
一般由两个标准来评价转向轮定位参数设置的合理程度:
(1)转向轮中心和车身静平衡时转向轮的定位参数和预设值之间的符合程度。
对多体模型进行转向轮同步跳动试验,在试验台上施加平移驱动模拟转向轮中心由最下端运动到最上端的工况(-40 mm~140 mm).
3 优化分析
转向梯形首先应满足阿克曼转向特性的要求,同时使得车轮在正常的跳动范围内车轮前束角变化量最小。优化时应根据这两个设计要求来设计约束条件和目标函数。
根据设计部门的要求只能对转向柱下联板的安装位置和几何形状进行调整,图4展示了该下联板的位置,对应的设计变量分别为:下联板偏移距、臂长、臂夹角。
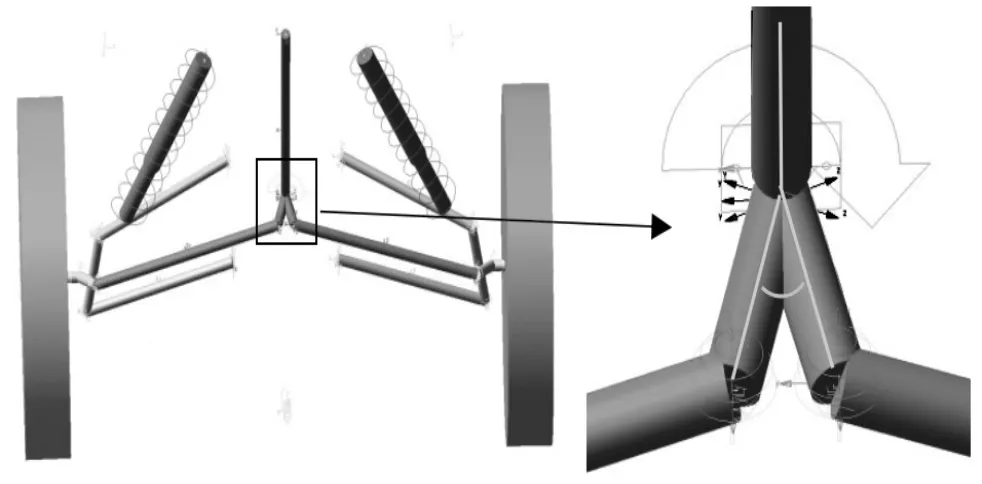
图4 下联板位置示意图
优化模型参数设置如表1所示,优化结果见表2,为了方便对比表2中同时展示了原状态的相关数据。
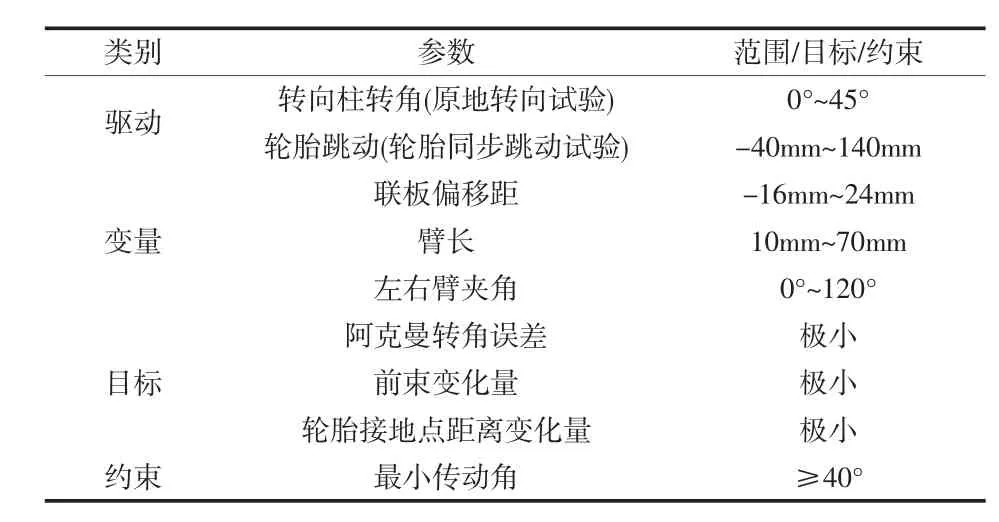
表1 优化模型参数设置
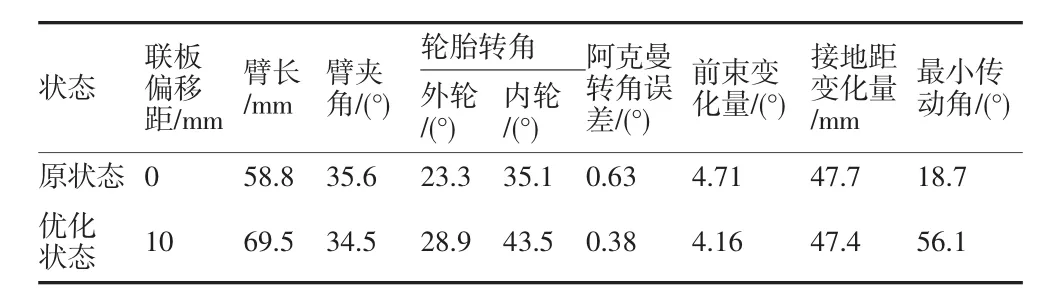
表2 优化结果
优化结果显示:在原地转向时,相同的方向盘转角,优化状态内轮和外轮的极限转角以及最小传动角都远大于原状态,同时阿克曼转角误差稍小于原状态,即转向能力更强更省力更顺畅;在轮胎同步跳动时,相同的轮胎跳动量,优化状态前束变化量和接地距变化量都稍小于原状态,即轮胎磨损机会稍小。
4 效果验证
为了验证优化效果,对原车、优化车和竞品车进行了最小转弯试验和蛇行试验。受试验条件所限,蛇行试验仅对比往返最短通过时间(同驾驶员、同场地、同路径)。试验现场如图5、图6所示,试验结果如表3所列。

图5 最小转弯试验

图6 蛇行试验
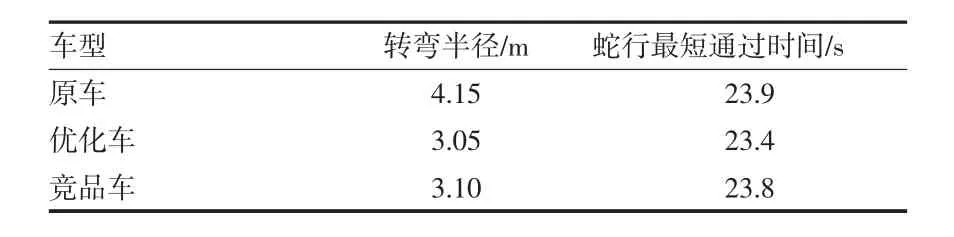
表3 试验结果
试验结果表明:优化车的转向性能远优于原车,接近甚至优于竞品车。
5 总结
本文以某ATV为载体,对转向性能进行了仿真分析,通过仿真优化分析确定了优化方案。经实车验证,确认优化方案达到了比较理想的效果,在基本不增加成本的基础上整车转向性能大幅提高达到竞品水平,专业驾驶员主观评价认为整车操稳性能甚至优于竞品,达到预期目标。
[1]王霄峰.汽车底盘设计[M].北京:清华大学出版社,2010.
[2]Er.Neeraj Singh Gautam,Prashant Awadhiya.Kinematic Syn thesis of a Modified Ackermann Steering Mechanism for Auto mobiles[C]//Vehicle Dynamics and Intelligent Control Systems,CA,USA:Asia Pacific Automotive Engineering Conference,August,2007.
[3]Manfred Mitschke.Dynamik der Kraftfahrzeuge[M].Version4.German,2009.
[4]周 兵,杨 凡,徐 琪.基于ADAMS的转向机构的优化设计[J].湖南大学学报(自然科学版),2008(12):23-26.
Optimization of ATV Steering System Based on Virtual Prototype
ZHAO Dong-sheng,LIU Jin-wei,YAN Tian-xiong,ZHU Ming-chao
(Loncin Co.,Ltd.,Chongqing 400052,China)
Aiming at the existing problems of ATV products in a company,the dynamic model of“front suspensionsteering system”was established by using virtual prototyping technology,and the steering system was optimized and optimized according to the theory of steering system design.Based on the existing experimental conditions to develop a suitable test program,verified by the actual vehicle to achieve the desired effect.
virtual prototyping;ATV;steering system;optimization
U489
A
1672-545X(2017)10-0225-04
2017-07-10
赵东升(1983-),男,河南南阳人,工程硕士,工程师,研究方向:车辆操稳平顺性控制。