基于PWM的远程控制新型变量喷雾系统设计
2017-12-16武同昆周超英
武同昆,周超英,谢 鹏
(1.哈尔滨工业大学(深圳),广东 深圳 518000;2.深圳市先进制造技术重点实验室,广东 深圳 518000)
基于PWM的远程控制新型变量喷雾系统设计
武同昆1,2,周超英1,2,谢 鹏1,2
(1.哈尔滨工业大学(深圳),广东 深圳 518000;2.深圳市先进制造技术重点实验室,广东 深圳 518000)
针对目前地面植保喷雾机械的局限性,开发了一种新型的变量喷雾系统。该系统在保持电动离心喷头压力和流量不变的前提下,采用离心雾化方式,雾化盘由三相无感无刷直流电机带动,利用ARM控制器输出频率固定占空比不同PWM信号作为无刷直流电机电子调速器的油门转速信号,改变雾化盘的转速,从而改变雾滴的粒径大小及覆盖率等参数。该系统采用了一个功率较大的无线收发模块SI4432,最大距离达到2km范围(这也是和其他远程喷雾系统相比根本的优势),用单片机和上位机远程实时地控制雾化盘的转速,同时在上位机和液晶屏幕上显示占空比。最后,利用设计的变量喷雾平台,在喷头压力为0.5MPa、流量为2L/min、雾化盘直径为58mm的条件下,获得了离心雾化喷头在不同的占空比对应的雾滴中值直径和覆盖率大小,通过上位机就可以实现电动离心喷头转速的较大范围的调整,可以在不同喷雾环境下针对不同的农作物使用这套系统。
PWM;远程控制;离心雾化; 喷雾系统;单片机
0 引言
我国是一个农业大国,农业的发展关系到国计民生。在施药方面,我国的农药生产水平已经达到国际领先水平,但在施药技术和施药机械上[1],特别是精准施药领域,相比西方发达国家,还有很大的差距,远远不能称为农业强国。现有的地面植保机械受我国地形多变的影响,有很大的局限性。而目前的空中施药机械,大多仅仅是方便众多地形的施药,没有严格按照“精准施药”的要求,没有考虑到天气和农作物的不同情况[2-6],即使考虑了变量,也没有得出喷头的转速和雾化效果之间的明确关系。
2010年,玄子玉[7]等人研究了基于单片机的喷雾控制系统硬件电路设计,对大田喷雾机喷雾控制系统加以改进,首次提出了同步喷雾技术的理念,并设计了一套非常实用的同步喷雾控制和决策方案。
2011年,吴小伟[8]等人研究了基于STC12单片机实现变量喷雾的工作原理和实现方案,设计的控制系统能够根据需要自动地调节喷雾参数,实现了变量施药作业。
2012年,茹煜[9]等人设计了基于无人直升机的远程控制喷雾系统,对影响离心雾化喷雾效果的主要因素进行了理论研究和性能试验,得出了电动离心喷头的最佳参数。
为了适应农作物和天气的变化,设计了一套控制系统,可以通过按键和上位机,通过无线收发芯片SI4432[10],利用PWM原理,远程控制电动离心喷头的转速。这样就可以在不同的喷雾温度、湿度和高度等天气条件下,针对不同的农作物,调节雾滴粒径的大小和覆盖率,达到精准施药的目的。
1 变量喷雾系统的原理及技术方案
1.1 工作原理
PWM调速有3种方式:定宽调频法、调频调宽法及定频调宽法。前两种方法由于在调速时改变了控制脉冲的周期(或频率),当控制脉冲的频率与系统的固有频率接近时,将会引起振荡,因此这两种方法用得很少,本设计选用定频调宽法。
系统工作时,ARM控制器输出频率一定占空比可变的PWM信号,PWM信号作为无感无刷电机电子调速器的油门调速信号[11-12],驱动无刷直流电机转动从而带动雾化盘以可变的速度转动。无刷电子调速器合适的频率为500Hz,所以PWM信号频率设为固定的500Hz。
电动离心喷头与电子调速器连接图如图1所示。

图1 电动离心喷头与电子调速器连接图
1.2 工作原理
变量喷雾控制系统的技术方案框图如图2所示。整个喷雾系统分为3部分(图中3个虚线框),包括离心喷头调速系统、远程控制系统和上位机控制系统。

图2 变量喷雾控制系统的技术方案框图
2 药液回路、硬件电路及软件编程的实现
2.1 药液回路设计
药液回路设计所需要的组件主要由密闭药箱、隔膜泵、过滤器及水管等组成。结构图如图3所示。

图3 药液回路结构图
2.2 隔膜泵
选用雷泰机电科技有限公司生产的LS-0116型微型电动隔膜泵作为其工作泵。该水泵配有一个水泵调压器,调节系统压力和流量,根据本实验的要求,喷头压力为0.5MPa、流量为2L/min。
2.3 电动离心喷头
离心喷头由连接件、三相无感无刷直流电机[11-12]和雾化盘组成。连接件用于固定喷杆;无感无刷直流电机带动雾化盘旋转,相对有刷直流电机,无刷直流电机效率更高、噪音更小、寿命更长,解决了有刷电机电刷打电弧火花对其他电子器件的干扰;雾化盘上面有均匀的锯齿状的凹槽,用于将药液离心雾化成极细的雾滴。电动离心喷头及电子调速器的技术参数如下:
工作电压/V:12 DC
KV值:1 000
转速/r·min-1:<13 000
最大直径/mm:58
2.4 硬件电路设计
2.4.1 主控制器
本设计中,电动离心喷头调速系统和远程控制系统的两个主控芯片采用ST公司生产的ARM控制器[13-16]STM32F103RBT6,主要有如下特点:低电压、超低功耗;64引脚;丰富的通信接口,多达9个通信接口,包括2个IIC接口,3个USART接口,2个SPI接口;较高的时钟频率;4个通用定时器和2个高级定时器可以同时产生30路的PWM信号。这些特点可以满足系统的需求,且保证了快速运算功能,这里使用控制器的最小系统包括主控制芯片、时钟电路、复位电路及调试电路。
2.4.2 电源集成模块
本系统采用12V锂电池供电,需要将12V电压转化为3.3V和5V为控制器及其外围电路供电。12V转5V可以一级降压,采用线性稳压器件78M05外加辅助电路构成的电源转换电路。12V转3.3V一级压降较大,发热大,需要采用二级降压,在5V的基础上采用稳压芯片REG1117-3.3将电压转化为3.3V。
78M05是常用的三端稳压器,能提供DC 5V的输出电压。REG1117-3.3是一款线性稳压电路,能固定输出3.3V电压。
另外,锂电池容易过放,易造成电池报废。这里在电源和电压转换部分接入了锂电池电压保护板,当锂电池电压低于9.7V时就自动断开。
电源集成模块电路原理如图4所示。

图4 电源集成模块电路原理图
2.4.3 人机交互模块
人机交互模块包括3部分:按键、LCD和无线通信芯片。
按键用于向控制器输入数据或指令,按键的类型有独立式键盘和矩阵式键盘,本课题选择独立式键盘。独立式键盘的一端接地或者电源,另外一端接入单片机输入的I/0口,通过检测I/0口的电平状态就可以判断是哪个按键按下了。按键接口电路设计,如图5所示。

图5 按键接口设计电路原理图
对于LCD,本设计选用的是Nokia 5110 LCD液晶显示器,与其它类型的产品相比,该模块具有采用串行接口,接线大大减少;传输速率高;体积小等优点。LCD模块电路接口原理图如图6所示。

图6 LCD接口电路原理图
通信模块分为两部分:一是上位机和控制器1的有线通讯;二是控制器1和控制器2的无线通讯。
有线通信方式采用串行通信方式,UART是一种通用串行数据总线,用于异步通信,该总线双向通信,可以实现全双工传输和接收。PC机的串行口是RS232信号电平,单片机用到的是TTL电平,所以本课题采用MAX232芯片把RS232电平转换为单片机的TTL电平。串口通信电路如图7所示。

图7 串口通信电路连接图
无线通讯方式采用433MHz无线串口通信,相比于2.4GHz等无线,433MHz无线穿透性更强,传输距离更远,这也是相对于其他远程喷雾系统的根本优势。由于本课题设置的变量喷洒装置要和小型多旋翼无人机配套使用,所以要求无线通信能够达到一定的距离,无线串口通信采用多频段的无线收发芯片SI4432,集成了单片机STC15,采用接线简单的串口通信,最远距离可以到2km,完全能够满足对传输距离的要求。无线收发芯片SI4432接口电路图如图8所示。

图8 无线串口模块通信接口电路原理图
利用面包板制作出实物图,远程控制系统和调速系统如图9和图10所示。
2.5 软件编程
整个系统分为3个部分:电动离心喷头调速系统、远程控制系统和上位机系统。
2.5.1 电动离心喷头调速系统的软件设计
采用ARM控制器STM32F103RBT6的通用定时器TIM3的通道CH1和CH2,产生两路完全相同的PWM波信号,驱动两个完全相同的电动离心喷头。这里将PWM的频率固定在8kHz,PWM占空比分为0~100%,调整的间隔为1%,这里重点介绍产生PWM波的软件配置,如图11所示。

图9 远程控制系统实物图

图10 调速系统实物图

图11 PWM输出的软件配置流程图
PWM频率设置关键代码:
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIMx, ENABLE);//初始化 TIMx
TIM_TimeBaseStructure.TIM_Period = arr;
//设置自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc;
//设置时钟频率预分频值
TIM3_PWM_Init(143,999);//设置arr和psc的值
经过以上设置,PWM信号频率计算公式为
(1)
其中,Tclk为系统时钟频率,Tclk=72MHz;arr为自动重装载寄存器周期的值;psc为时钟频率预分频值。
PWM占空比改变部分程序为:
TIM_SetCompare2(TIM_TypeDef* TIMx, uint16_t Compare2);
修改捕获/比较寄存器TIMx_CCRx中的值,与自动重装载寄存器TIM3_ARR中的值比较,就可以得到不同的占空比。
则占空比公式为
(2)
PWM信号波形图采用软件仿真的方法查看,PWM占空比分别为75%、45%、30%和10%的波形仿真图,如图12所示。

图12 PWM占空比分别为75%、45%、30%和10%的波形仿真图
2.5.2 远程控制系统的软件设计
远程控制系统上电后,先配置主控制器时钟信息,然后初始化所有外设,LCD显示开机画面,并不断的进行按键扫描;当按键按下时,将信息通过SI4432和串口线分别传输到调速系统和上位机,同时LCD刷新占空比显示,主程序框图如图13所示。
主函数关键代码如下:
int main(void)
{
SystemInit();//时钟系初始化
comInit(); //串口初始化
LED_GPIO_Config();
Key_GPIO_Config();//外设初始化TIM3_Int_Init(4999,7199);//TIM3初始化
TIM_Cmd(TIM3, ENABLE);//使能TIM3
while(1)
{
if(Key_Scan(GPIOC,GPIO_Pin_0)== KEY_ON );comSendBuf(COM2, mott, strlen(mott));//发送数据到上位机和SI4432
}
}

图13 远程控制系统主程序框图
2.5.3 上位机系统的软件设计
上位机系统显示和调节占空比的大小,与远程控制系统配合使用。通过电机按钮控件,将设置的数值远程传输到电动离心喷头调速系统,修改 TIM3_CCR2的值来改变占空比的大小。上位机界面和系统的流程如图14和图15所示。
关键代码如下:
Private Sub Command7_Click()
If Val < 100 Then '增加占空比
Val = Val + 1
Else
Val = 100
End If
Private Sub Command8_Click()
If Val > 0 Then'减小占空比
Val = Val - 1
Else
Val = 0
End If

(a)

(b)
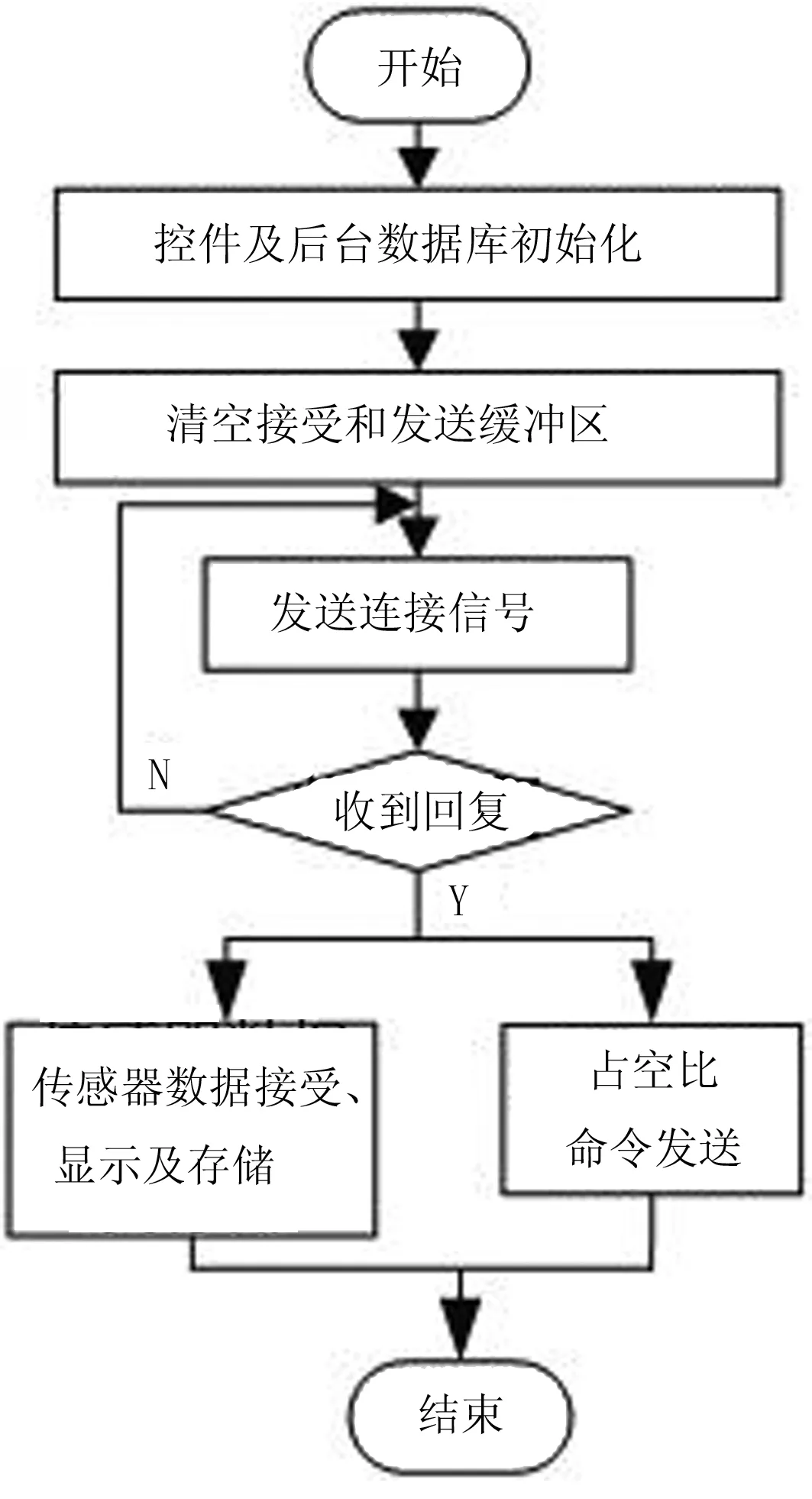
图15 上位机流程图
3 试验分析
3.1 PWM占空比与转速关系
利用设计的变量喷雾系统,在不同的PWM占空比下,采用高精度转速计多次测量求喷头转速的平均值,分析PWM占空比大小和电动离心喷头转速之间的关系,试验条件如下:
喷头流量为2L/min;喷头压力为0.5MPa;离心喷头雾化盘直径为58mm。
经过测试,PWM油门信号占空比和电动离心喷头转速数据对比如表1所示。

表1 PWM占空比和电动离心喷头转速表
由表1可以看出:当占空比较小时,由于无刷直流电机自身的阻力,电机并不会转动;当占空比接近100%时,转速基本饱和,变化已经很小,PWM有效占空比范围大约是10%~100%。为了更准确根据数据表拟合出函数表达式,采用5次多项式来拟合,拟合结果如图16所示。
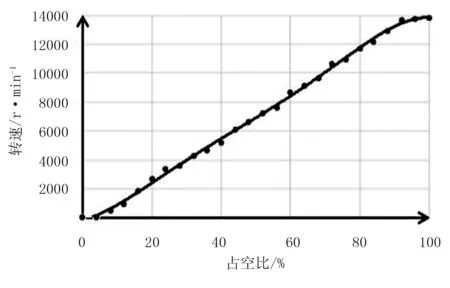
图16 占空比和转速五次函数拟合曲线
拟合曲线的函数表达式为
(3)
其中,y为电动离心喷头转速(r/min);x为PWM波占空比的百分数。R2=0.998 4,说明拟合效果比较好。
3.2 喷雾试验
利用设计的喷雾平台,在适宜的天气条件下,利用雾滴采集卡(水敏纸)采集雾滴,测得不同占空比下的雾滴试样。以PWM占空比为40%、70%和95%为例,经过图像处理软件去背景、去噪、阈值设定和二值化等一系列处理后,得到雾滴的体积中值直径(Dv50)分别为289、177、87μm,覆盖率分别为5.68%、15.6%和17.9%,由此可见,该变量喷雾装置可设定的雾滴粒径范围较大。雾滴试样如图17所示。

(a) Dv50为289μm,覆盖率5.68%的雾滴试样

(b) Dv50为177μm,覆盖率15.6%的雾滴试样

(c) Dv50为87μm,覆盖率17.9%的雾滴试样
4 结论
本文设计的新型变量喷雾系统装置应用于小型多旋翼无人机的农药喷洒,主要考虑了喷雾环境和农作物的种类的不同,通过脉宽调制信号改变雾化盘转速,从而改变雾滴的沉积特性。该系统硬件电路简单明了,ARM可以直接输出数字PWM信号,软件采用模块化编程,程序层次分明,容易调试。在此喷雾平台上,建立了PWM占空比和雾化盘转速之间的五次方程函数关系,可对后续的喷雾作业进行指导。通过喷雾试验验证,该系统性能稳定,可调雾滴粒径范围广,从几十微米到几百微米,在保证雾滴尺寸的基础上测试了雾滴的覆盖率,证明雾滴的覆盖率也满足航空喷雾的要求。该变量喷雾装置,可以满足大多数喷雾环境和大多数农作物对雾滴尺寸的要求,适用场合广,有很强的实用性。
[1] 高圆圆. 无人直升机(UAV)低空低容量喷洒农药雾滴在禾本科作物冠层的沉积分布及防治效果研究[D]. 哈尔滨:东北农业大学,2016.
[2] 工业和信息化部.JBT 9782-2014 《植物保护机械 通用试验方法》[S].北京:中华人民共和国工业和信息化部,2014.
[3] 中国民用航空总局.MH/T1002-1995 《农业航空作业质量技术指标》[S].北京:中华人民共和国工业和信息化部,1995.
[4] 黄丽娟.气象条件对农用飞机航空作业的影响[J]. 现代化农业,2008(5):11.
[5] 冯鹏.提高农药施用效果勿忽视天气因素[J]. 农药科学与管理,2011(7):60-61.
[6] 袁会珠,王国宾.雾滴大小和覆盖密度与农药防治效果的关系[J].植物保护,2015(6):9-16.
[7] 玄子玉,刘立意,张玉峰.基于单片机的喷雾控制系统硬件电路设计[J].农机化研究,2010,32(2):183-184.
[8] 吴小伟,茹煜,周宏平.基于单片机的雾化装置控制系统设计[J].农机化研究,2011,33(5):104-106.
[9] 茹煜,贾志成,范庆妮,等.无人直升机远程控制喷雾系统[J].农业机械学报,2012(6):47-52.
[10] Silicon Labs .SI4432芯片编程指南[K].美国:Silicon Labs,2013:35-65.
[11] 王严.基于单片机的无刷直流电机控制系统设计与实现[D].南京:南京邮电大学,2013.
[12] 何昱.基于无刷电机的航模系统的研究[D].武汉:武汉理工大学,2008.
[13] 罗佳,孙运强. 51系列单片机与ARM处理器的比较[J].工业控制计算机,2007(5):64-66.
[14] 刘军.STM32F103RBT6最小系统板原理图[R].广州:广州市星翼电子科技有限公司,2013:1-2.
[15] 意法半导体(ST). STM32F103xx固件函数库使用手册[R].意大利:意法半导体(ST),2011:72-112.
[16] 刘军. STM32参考手册[R].广州:广州市星翼电子科技有限公司,2011:70-88.
Remote Control Variable Rate Sprayer Controller System Based on PWM
Wu Tongkun1,2, Zhou Chaoying1,2, Xie Peng1,2
(1.Harbin Institute of Technology ( Shenzhen),Shenzhen 518000,China;2.Key Laboratory of Advanced Manufacturing Technology,Shenzhen 518000,China)
Due to the limitations of ground plant protection spraying machinery, a new type of variable spray system was designed. Under the premise of constant pressure, centrifugal atomization was adopt in the spray system, the atomizing disk is driven by three phase brushless DC Motor, apply different duty cycles PWM principle from ARM Controller, change the speed of atomizing disk, thus changed the parameters, such as particle size of the droplet, coverage etc. The variable spray system adopt a radio frequency chip SI4432, MCU and PC to control the speed of atomizing disk remotely, at the same time, the duty cycle of PWM is shown on LCD and PC. At last, when the diameter of atomizing disk is 58mm,nozzle pressure is 0.5MPa and the flow is 2L/min ,use the variable spray platform, get the Dv(50) and coverage size of droplet that correspond to different duty cycles. A wide speed range of atomizing disk can be changed by PC. So, the system can be used in different occasions.
PWM; remote control; centrifugal atomizing; spray system; MCU
2016-06-02
深圳市创新环境建设计划重点实验室提升项目(ZDSYS201 40508161547829);深圳市科技计划基础研究项目(JCYJ20150625142543480);深圳市科技计划基础研究项目(JCYJ20150625142543480,JCYJ20150625142543449)
武同昆(1989-),男,山东济宁人,工学硕士,( E-mail)wutongkun1989@163.com。
周超英(1967-),女,湖北荆州人,教授,博士生导师,( E-mail)cyzhou@hit.edu.cn。
TP273+.5;S126
A
1003-188X(2017)07-0076-07
