不同GNSS的单站时差监测评估
2017-12-06李双钦郭美军洪英杰
孙 广, 李双钦, 郭美军, 翟 伟, 洪英杰, 张 敏
(西安航天天绘数据技术有限公司,西安 710054)
不同GNSS的单站时差监测评估
孙 广, 李双钦, 郭美军, 翟 伟, 洪英杰, 张 敏
(西安航天天绘数据技术有限公司,西安 710054)
随着GPS、GLONASS导航系统的不断完善和更新,以及后续GALILEO、BDS等系统的逐步建立,多系统组合导航成为GNSS当前研究热点。为了实现不同GNSS系统之间的兼容和互操作,准确确定不同系统间时差是关键。基于此,利用天宝R9多模双频接收机输出的GNSS观测数据、导航电文以实现监测GNSS系统的时差。由于国际计量局(BIPM)T公报缺少BDS相关数据,只对GLONASS和GPS实测的时差数据和BIPM T公报中对应的时差数据进行评估,统计了BDS、GPS和GLONASS三系统时差数据的最大值、最小值、均值、标准差、均方根误差。利用2016年1月到10月的连续时差数据进行时差监测评估,结果表明: GLONASS与GPS时差与T公报结果的残差标准差为4.28ns,北斗与GPS、GLONASS系统时差的标准差最优可达到4ns和5ns。
系统时差;GNSS;监测评估;BIPM
0 引言
当前BDS服务于亚太地区,欧盟的GALILEO也正在建立,多模卫星导航已成为当前热点。多模卫星导航是利用不同导航系统进行联合导航,实现优劣互补,可在一定程度上提高导航精度[1]。
不同的GNSS导航系统均有自身的时间系统,GPS系统时为GPST,溯源至美国海军天文台的协调世界时;GLONASS系统时为GLONASST,溯源至俄罗斯的协调世界时;Galileo系统时为GST[2-5],采用欧洲几个时间实验室的UTC综合计算作为其时间基准;北斗系统时为北斗时(BDT),是由北斗地面控制站的钟组产生,并溯源至UTC(NTSC)[6]。不同的系统间会有时间偏差,实现多模卫星导航的基础是对不同系统的时间进行统一。
由于系统时间偏差会对定位、测速和定时产生影响,会导致多模导航达不到预期的精度,所以对系统间时差的研究是有必要的。系统时间偏差监测方法主要有两种,分别为系统级和用户级[7]。
本文利用系统级监测方法,通过多模接收机获取的伪距观测量分别解算本地时与BDS系统、GLONASS系统以及GPS系统的时差,最后对三系统时差进行性能评估。
1 时差监测原理
本文采用空间信号法进行时差监测,利用一个监测站(单站)的单模/多模接收机获取GNSS系统的空间信号,最后利用导航定位原理对系统的时间偏差进行解算,监测原理如图1所示,用相关算法即可解算出三系统的系统时差[7-9]。
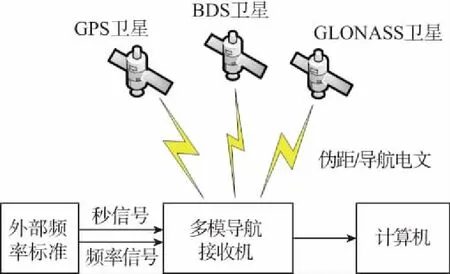
图1 时差监测示意图Fig.1 Diagram of time difference monitoring
伪距观测方程如式(1)所示
P=ρ+cdtt-cdts+dorb+dtrop+dion+
dmult+dcha+dode+ε
(1)
式中,P是伪码距观测值,ρ是测站与卫星距离,cdtr是接收机钟差改正,cdts是卫星钟钟差改正,dorb是卫星轨道误差,dtrop是对流层误差,dion是电离层误差,dmult是多路径时延,dcha是接收机通道时延,dode是电缆参考时延,ɛ是伪距测量噪声。通过伪距观测量和导航电文可计算获取接收机钟差,如式(2)
(2)
假设GPS、GLONASS、BDS的导航电文和伪距观测量获得接收机钟差分别为REFG、REFR、REFC,由此可用式(3)计算两系统的时差:
(3)
其中,TCG、TCR、TRG分别为BDT与GPST的时差、BDT与GLONASST的时差、GLONASST与GPST的时差。
2 误差模型
GNSS系统时差监测中主要误差项有:卫星钟差、卫星星历误差、相对论效应、地球自转效应、电离层时延、对流层时延、电缆时延和多路径效应。
(1)卫星钟差
以BDS系统为例, BDT在t时刻的卫星钟差[6]为式(4)
Δtsv=a0+a1(t-toc)+a2(t-toc)2
(4)
式中,a0是初始时刻卫星时钟相位偏差,a1是初始时刻卫星时钟频率偏差,a2是卫星时钟频率漂移,t是信号发射时刻的BDT,由信号发射时刻的卫星测距码相位时间代替,toc是卫星钟数据的参考时间。
对于B1I信号的用户,还需要使用进一步修正,如式(5)所示
(Δtsv)B1I=Δtsv-Tgd1
(5)
式中,Tgd1为星上设备时延差,可由卫星导航电文获得。
(2)卫星星历误差
与卫星钟误差修正相同,通过主控站对卫星位置最佳预测值进行拟合,上传至卫星,以导航电文的形式播发给用户[7]。
(3)相对论效应
由于卫星钟和地面钟所处的运动状态和受力不同,会使卫星钟和地面钟产生相对偏差,对相对论效应修正的计算公式如式(6)所示

本实验确定了超声波辅助提取红枸杞多糖的最佳工艺条件为:料液比为1∶50、超声温度:60℃、萃取时间3min、超声次数:1,在此条件下红枸杞多糖的提取率为5.12%。
(6)

(4)地球自转效应
由于地球自转会引起接收时刻和发射时刻卫星位置的相对论误差,考虑Sagnac效应。卫星坐标改正公式为式(7)
(7)
式中,[xyz]表示修正后的卫星位置,ω表示地球自转角速率,τ表示卫星信号在空间中的传播时间。
(5)电离层时延改正
电离层时延改正采用双频伪距观测量的组合消除电离层时延,计算公式如式(8)
(8)
(6)对流层时延改正
通常利用包含气象参数的模型来估算对流层延迟。常用的改正模型有Hopfield和Saastamoinen模型,本文采用Hopfield模型进行修正。
3 实验结果分析
3.1 2016年时差波形
本文利用天宝R9多模接收机获取三系统的相关测试数据,接收机外接参考主钟的1pps/10MHz信号,选取接收机接收到的2016年10个月的BDS、GPS、GLONASS三系统相关数据,采用第3节中的各种误差模型进行修正,利用导航电文、伪距通过式(3)可获取GPST、GLONASST和BDT的系统间时差,实测时差数据间隔为15min,通过中位数法剔除时差数据的粗差,最后应用vondrak进行滤波[10]。时差波形如图2~图4所示,为2016年1月~10月GNSS导航系统时差数据波形图,其中图2为BDT与GPST的时差波形,图3为GLONASST与BDT的时差波形,图4为GLONASST与GPST的时差波形,图中红色部分为滤波后的曲线图。
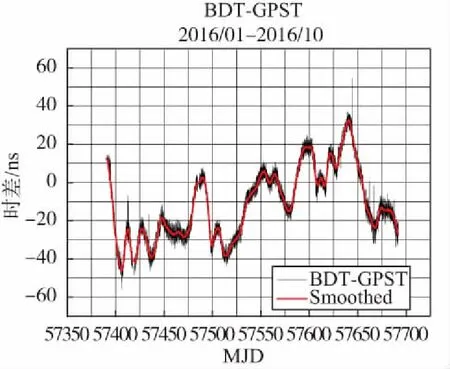
图2 2016年1月-10月BDT与GPST时差波形Fig.2 Curve of BDT and GPST time difference in 2016.01 to 2016.10

图3 2016年1月-10月BDT与GLONASST时差波形Fig.3 Curve of BDT and GLONASST time difference in 2016.01 to 2016.10
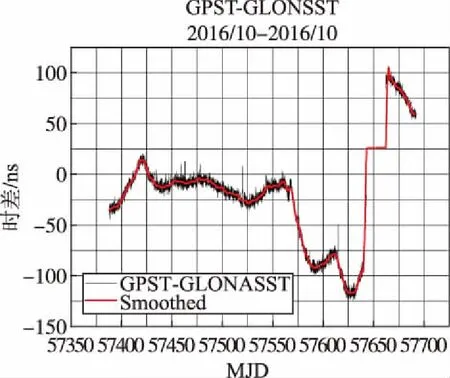
图4 2016年1月-10月GLONASST与GPST时差波形Fig.4 Curve of GLONASST and GPST time difference in 2016.01 to 2016.10
从图2中可以看出,测试数据中BDT-GPST时差在-60ns~60ns之间变化,图3和图4中可以看出2016年1月~10月GLONASST-GPST、GLONASST-BDT波形在-150ns~100ns上下浮动,在9月份波形出现跳变。
3.2 统计结果分析
测试数据的统计结果如表1所示,表1中RG表示GLONASST-GPST,CG表示BDT-GPST,RC表示GLONASST-BDT,统计了2016年1月~10月BDT、GLONASST、GPST两两系统时差的最大值(MAX)、最小值(MIN)、平均值(MEAN)、标准差(STD)、均方根误差(RMS)和95%置信度(Upper)。
用柱状图描述了各导航系统测试数据每月的变化情况,纵轴为测试数据标准差。如图5~图7所示,从其中可以看出,GLONASST与GPST、BDT 的标准差除9月均优于17ns。由于9月以后,GLONASST数据整体出现向上跳变, GLONASST与GPST、BDT标准差增大到60ns,10月份标准差恢复到20ns以内。从图6中可以看出,BDT与GPST的标准差测试数据各月优于17ns,标准差最好可达到4ns。
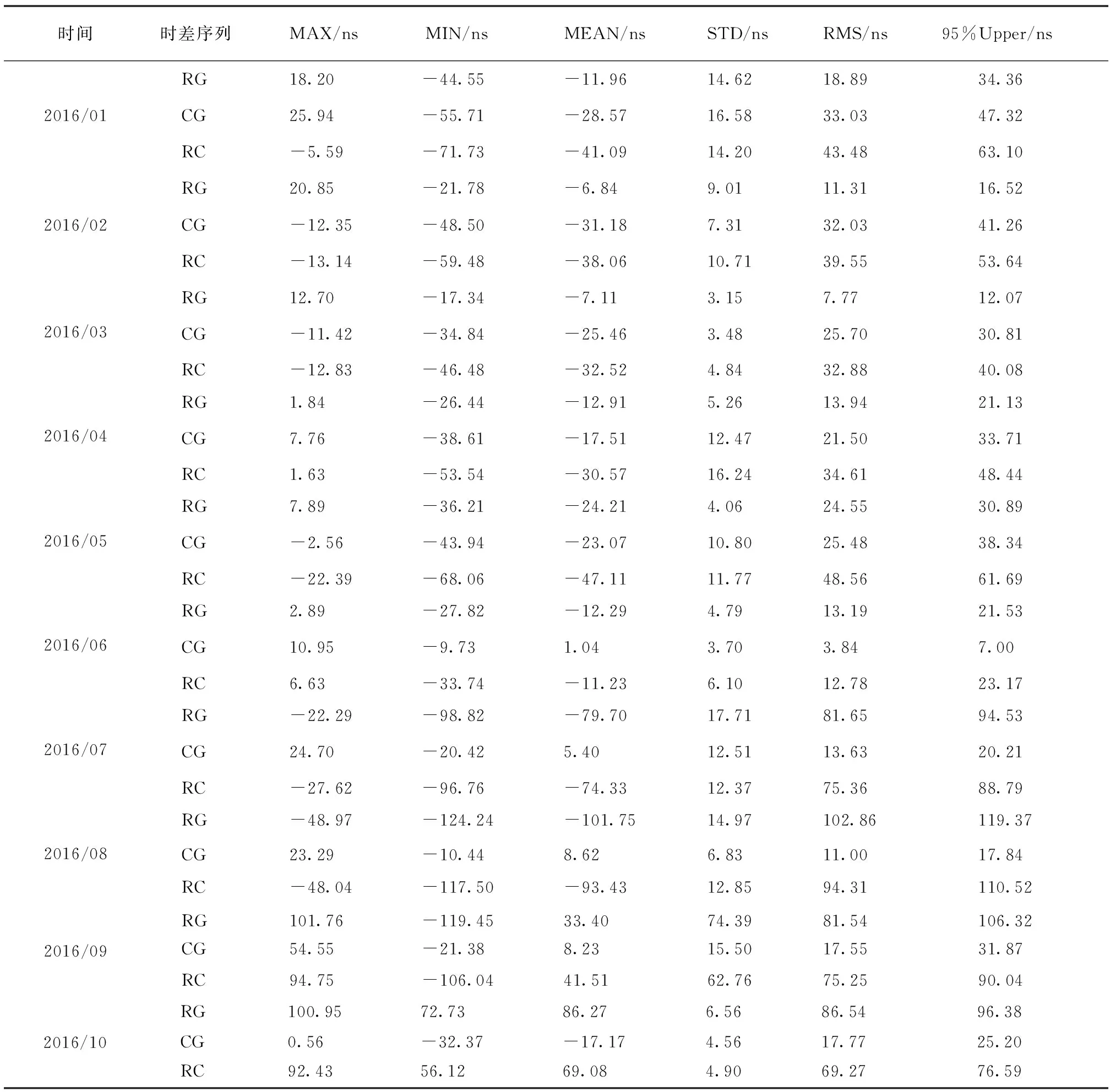
表1 2016年1月-10月GNSS时差统计结果
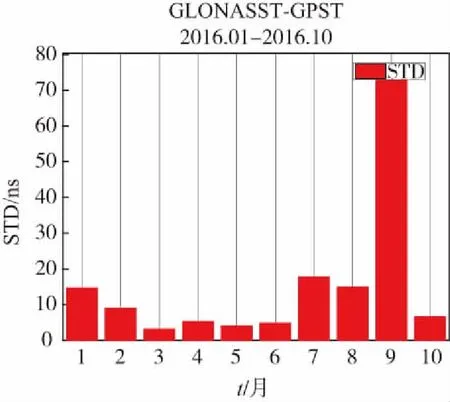
图5 2016年1月-10月GLONASST与GPST时差STDFig.5 STD curve of GLONASST and GPST time difference from 2016.01 to 2016.10
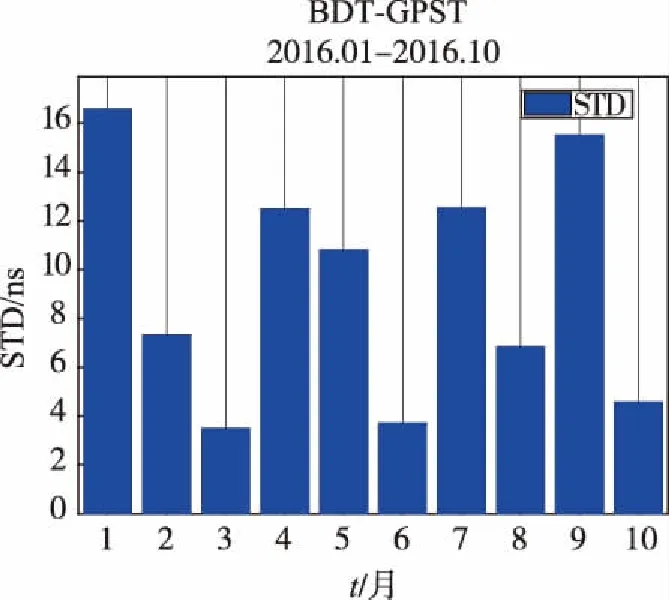
图6 2016年1月-10月BDT与GPST时差STDFig.6 STD curve of BDT and GLONASST time difference from 2016.1 to 2016.10
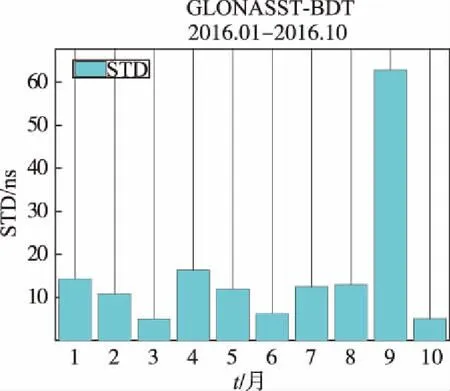
图7 2016年1月-10月GLONASST与BDT时差STDFig.7 STD curve of GLONASST and GPST time difference from 2016.1 to 2016.10
3.3 与BIPM结果比较
在BIPM网站下载T公报数据,其中每天一组数据UTC-GNSST。目前,T公报缺少BDT数据,本文只对比T公报数据和实测的GLONASST-GPST时差数据,操作步骤如下。
1)T公报第五部分UTC-GLONASST与UTC-GPST两列时差序列作差,获得GLONASST-GPST;
2)将从T公报获得时差序列与实测的时差序列作差,用T公报的真值来评估实测的GLONASST-GPST。
图8所示为GLONASST-GPST与T公报真值和实测值波形图,其中点画红线的为实测值,点画黑线为T公报真值。图9所示为T 公报真值和实测值的残差曲线图。表2所示为残差结果各项具体参数。从表2中可以得出,GLONASST-GPST的监测结果与T公报结果绝对值最大值不超过13ns,标准偏差优于5ns。

图8 GLONASST-GPST实测值和T公报对比Fig.8 Curve of GLONASST and GPST time difference, BIPM T bulletin
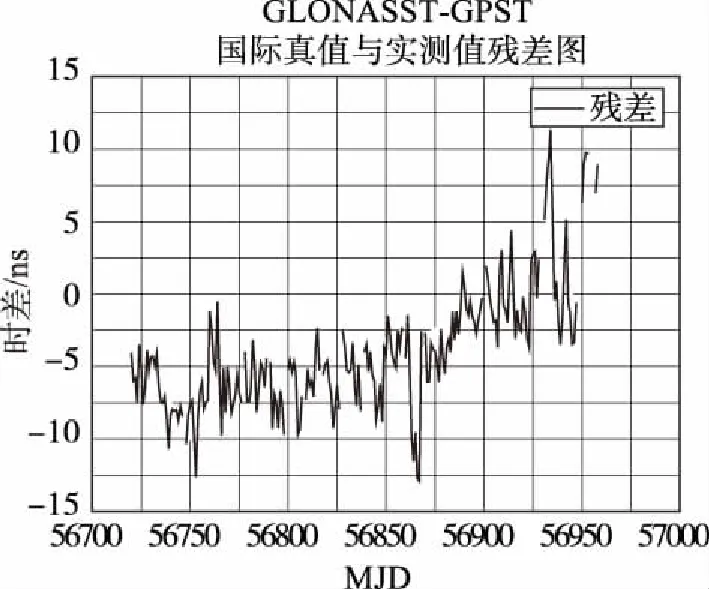
图9 GLONASST-GPST T公报值与实测值残差Fig.9 The residual curve of GLONASST and GPST time difference, BIPM T bulletin

时差类型MAX/nsMIN/nsMEAN/nsSTD/ns残差值11.35-12.9-3.984.28
4 结论
本文介绍了GNSS时差监测的原理和各种误差修正模型,分析了2016年1月~10月BDT、GPST、GLONASST三系统时差各项指标,分析结果显示,由于GLONASST在9月出现跳变,BDT与GPST、GLONASST标准差除9月外,均优于17ns。用BIPM T公报时差结果对实测的GLONASST-GPST时差序列进行评定,评定结果显示,监测结果与T公报结果绝对值最大值不超过13ns,标准差优于5ns,表明本文方法进行时差监测是可行的。
时差监测是一项非常有意义的工作,对于用户进行多模导航具有辅助的作用[11]。本文中时差监测的算法是基于伪距的,若要提高监测结果的精度,可利用载波相位平滑伪距或非差相位数据进行时差监测。
[1] 吴海涛,李孝辉,卢晓春,等. 卫星导航系统时间基础[M]. 北京: 科学出版社,2011.
[2] 杨元喜,陆明泉,韩春好. GNSS互操作若干问题[J]. 测绘学报,2016,45(3): 253-259.
[3] Galluzzo G, Mudrak A, Binda S, et al. GGTO and UTC dissemination results in the GIOVE-mission[C]//European Frequency and Time Forum Meeting, 2010.
[4] Allan D W, Thomas C. Technical directives for standardization of GPS time receiver software[J]. Metrologia,1994,31(1):69-79.
[5] Hahn J H,Powers E D. Implementation of the GPS to Galileo time offset [C]//Proceedings of the 2005 Joint IEEE International Frequency Control Symposium and Precise Time and Time Interval Systems and Applications Meeting. Vancouver, Canada, 2005:33-212.
[6] 朱琳. GNSS系统时差单站和多站联合监测方法研究[D]. 北京: 中国科学院大学,2013.
[7] 李晓瑞. 单站GPST_GLONASST实时监测与预报研究[D]. 北京: 中国科学院大学,2013.
[8] 于合理, 郝金明, 刘伟平, 等. 附加原子钟物理模型的PPP时间传递算法[J]. 测绘学报, 2016, 45(11): 1285-1292.
[9] 刘晓刚, 吴晓平, 张传定. 卫星双向共视法时间比对计算模型及其精度评估[J]. 测绘学报, 2009, 38(5): 415-421.
[10] 王宁波, 袁运斌, 张宝成, 等. GPS民用广播星历中ISC参数精度分析及其对导航定位的影响[J]. 测绘学报, 2016, 45(8): 919-928.
[11] 田力,陈俊平,裴霄,等. GNSS时差及其在多系统组合定位中的应用[J]. 测绘通报,2012(10): 45-47.
MonitoringandEvaluationontheSingleStation
TimeOffsetontheGNSSDataofDifference
SUN Guang, LI Shuang-qin, GUO Mei-jun, ZHAI Wei, HONG Ying-jie, ZHANG Min
(Xi’an Aerorspace Remote Sensing Data Technology Corporation, Xi’an 710054, China)
With the improvement and updating of GPS and GLONASS and the gradual establishment of GALILEO and BDS navigation system, Multi-system GNSS navigation systems have become hot spot. In order to achieve the compatibility and interoperability among the different GNSS systems, it is the key to accurately determine the time difference between different systems. Based on this, the GNSS observation data output by the Trimble R9 multi-mode dual-band receiver and the GNSS system’s navigation message are used to monitor the time difference between different GNSS. Because there is no BDS data in the BIPM T bulletin, the data of the measured time difference of GLONASS and GPS and the corresponding time difference data of BIPM T bulletin are used to be evaluated. For BDS, GPS and GLONASS, the maximum, minimum, mean, mean square error, RMSE of their time difference data are taken into account statistically. Time difference evaluation and monitoring is carried out based on time difference data from January to October 2016. The results show that the residual standard deviation between time difference of GLONASS, GPS and the results of T bulletin is 4.28ns, and the residual’ standard deviation between BDS with GPS and GLONASS can reach 4ns or 5ns in optimal conditions.
System time difference; GNSS; Monitoring and evaluation; BIPM
10.19306/j.cnki.2095-8110.2017.06.013
TN697.1
2095-8110(2017)06-0080-06
2017-05-10;
2017-06-22
地理信息工程国家重点实验室开放研究基金资助项目(SKLGIE2015-M-1-4)
孙广(1986-),男,工程师,主要从事GNSS数据处理方面研究。E-mail:sunguang216@163.com
