一种多源组合定位系统中信息质量评估方法
2017-12-06邓中亮胡恩文
尹 露,邓中亮,朱 棣,胡恩文
(北京邮电大学 电子工程学院,北京 100876)
一种多源组合定位系统中信息质量评估方法
尹 露,邓中亮,朱 棣,胡恩文
(北京邮电大学 电子工程学院,北京 100876)
多源组合定位系统可有效提高定位精度及定位鲁棒性。但更多的信息源提高了引入低质量信号的可能性,从而影响组合系统的定位性能。针对该问题,提出了一种多源组合定位系统中信息质量评估方法。在单系统信息质量评估的基础上,分析了其虚警率与漏警率,发现了二者的影响因素,利用多系统拥有更多冗余信息的特点,通过一致性检验,实现了多源组合导航系统的信息质量评估。仿真实验结果表明,该方法可以同时降低信息质量评估的虚警率与漏警率,且随着组合定位系统数量的增大,虚警率与漏警率呈持续下降趋势,拥有较好的信息质量评估效果。
多源组合定位;信息质量评估;一致性检验;虚警率;漏警率
0 引言
随着位置服务(Location Based Service, LBS)的快速发展,人们对定位精度的要求越来越高[1]。传统的卫星定位系统,如全球导航卫星系统(Global Navigation Satellite System, GNSS),由于易受干扰、信号弱等缺点[2],很难满足当前对定位鲁棒性和定位精度的需求。因此,近年来出现了很多新的定位系统,如基站定位系统、Wi-Fi定位系统、超宽带(Ultra Wideband, UWB)定位系统等[3-5]。但是,各个定位系统各有优缺点,单一定位系统仍很难同时满足定位精度和定位鲁棒性的需求[6]。因此,多源组合定位成为了近些年的研究热点[7]。
多源组合定位系统往往存在一定数量的冗余信息,尤其当系统数量较多时,观测方程的维度会大幅增加,从而导致野值剔除的难度增加。如果不对定位信息进行质量评估,野值或不精确的定位信息可能会对组合定位结果产生很大影响,从而导致较低的组合定位精度。
针对该问题,已有一些学者进行了研究。文献[8]与文献[9]分别提出了针对GNSS系统的野值判断方法;文献[10]提出了一种基于似然的野值检测与剔除方法。但它们无法直接应用到多源组合定位系统中。文献[11]提出了一种基于归一化新息平方(Normalized Innovation Squared,NIS)的定位传感器信息质量评估方法;文献[12]提出一种基于H∞滤波器的组合导航系统抗野值滤波方法,但它们的漏警率与虚警率有待提高。文献[13]与文献[14]提出了WSN定位中的野值剔除方法,文献[13]利用范数正则化矩阵检测并剔除野值噪声,文献[14]利用鲁棒区域合并操作剔除野值;但它们计算复杂度较高。
针对上述问题,本文提出了一种多源组合定位系统信息质量评估方法,该方法利用所有系统的信息,共同评估某一系统的信息质量。仿真实验表明,本文提出的方法可同时减小漏警率与虚警率,拥有更加精确可靠的信息评估结果。
1 组合定位方式
在多源组合定位系统中,定位信息一般有两种组合方式[15-16]:1)通过测量值组合,即利用各个系统测量的距离、信号角度、信号强度等信息,通过一定的模型直接计算定位结果;2)通过定位结果组合,即将每个定位系统输出的定位结果,通过一定的算法融合为一个精度更高的结果。第一种组合方式中,由于每种定位系统的测量值类型不一、更新速率不同等原因,需寻找适当的定位模型进行组合,算法复杂度较高,甚至有时无法组合。第二种组合方式中,每个定位系统均会产生本次定位结果,只要将其转换到同一坐标系中(如GNSS定位结果一般为地固地心坐标(Earth-Centered, Earth-Fixed, ECEF),Wi-Fi定位结果一般为建筑物相对坐标),就可以利用一定算法进行组合定位,算法复杂度相较第一种大幅下降。
本文针对第二种组合方式,进行信息质量评估方法的研究,在单系统评估方法的基础上,提出基于一致性检验的多系统信息质量评估方法。
2 多源组合定位系统信息质量评估方法
2.1 单系统信息质量评估方法
设变量α符合标准正态分布,若|α|gt;T,其中T是由显著性水平确定的门限值,则认为α为野值。
多源组合导航系统中,定义第i个系统的新息为该系统的定位结果与一步预测之间的差值,即
(1)

(2)
其中,A表示状态转移矩阵,xk-1表示上一时刻状态。设新息的方差为
(3)

(4)
2.2 信息质量评估中虚警率与漏警率分析
由于一步预测值存在误差,其误差大小会影响信息质量评估结果。设x0,k表示k时刻真实状态,则可将第i个系统的定位结果写为
zk,i=x0,k±ak,iTσz,i
(5)
其中,比例因子ak,i≥0。因此有
(6)

设事件A表示定位结果zk,i是野值,事件B表示新息sk,i被判断为野值,“1”表示事件为“真”,“0”表示事件为“假”,则有4种情况如表1所示。

(7)
(8)
表1 信息质量评估的4种情况
漏检率与虚警率(表1中的p10,k,i和p01,k,i)是信息质量评估的重要指标之一,更高的漏检率与误检率一般均会导致更大的组合定位误差。通过表1及式(8)可以看出,由于参考系统存在误差,即βi存在上界,导致漏警率与虚警率的存在。为了降低漏检率与虚警率,除了利用一步预测值,本文还利用其他定位系统的定位结果,进行信息质量评估的一致性检验。
2.3 基于一致性检验的多系统信息质量评估
定义第i个系统和第j个系统的相对新息如式(9)所示
sk,ij=zk,i-zk,j
(9)
则其归一化相对新息为
(10)

(11)
其中,βij表示第i个系统和第j个系统测量值标准差的比值。当存在N个系统时,对于某一个系统的定位信息,一共有N个质量评估结果(N-1个结果由其他系统给出,1个结果由一步预测给出),当N个结果中判断该系统信息为野值的比例达到一定门限(本文设为50%)后,即判断该值为野值,否则该值为正常值,如表2所示(以1号系统出现野值为例)。
表2 信息评估一致性检测
p1,k,ij与βij有关,其关系如图1所示。注意到当βij较小时,p1,k,ij较大,此时无论zk,i是否为野值(即无论ak,i为多少),均有很大可能将其判断为野值,即虚警率过高。因此在实际应用中,若参照系统误差远大于被评估系统,则不以其为参照对象。
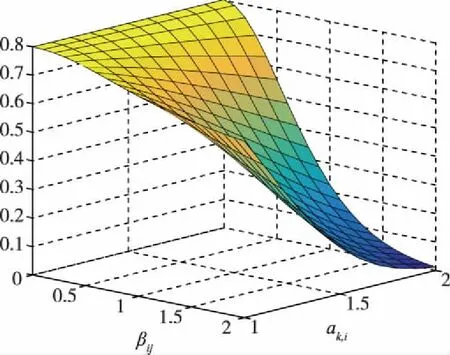
图1 p1,k,ij与βij关系(T=1.28)Fig.1 The relationship between p1,k,ijand βij (T=1.28)
3 性能分析

图2与图3所示分别为不同算法下漏警率与虚警率的对比(系统个数为3时)。从图中可以看出,本文所示方法在漏警率与虚警率角度均好于传统方法。另一方面,随着a0的增加,漏警率进一步降低,当a0=2时,本文方法的漏警率下降到1%附近,可近似认为此时信息质量评估中不存在漏警;而随着a0的降低,虚警率也进一步降低,当a0=0.5时虚警率仅为2%左右。

图2 不同算法下漏警率对比Fig.2 Comparison of false dismissal rate in different algorithms
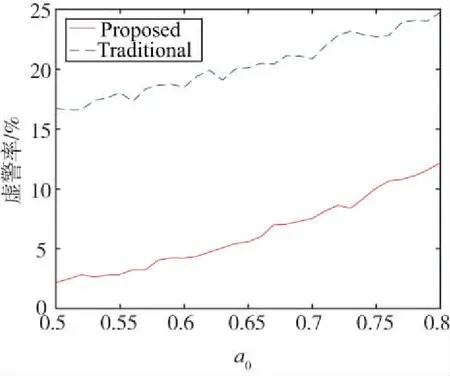
图3 不同算法下虚警率对比Fig.3 Comparison of false alarm rate in different algorithms
图4所示为a0分别为0.5与1.5时,本文方法漏警率、虚警率与系统个数的关系(N=1表示单系统定位,没有其他系统辅助评估信息质量)。从图4中可以看出,漏警率和漏警率均随系统个数的增大明显下降。特别地,漏警率由单系统时的28.4%下降到10系统时的8.2%;当系统数大于5时,虚警率下降到1%以下,可近似认为此时信息质量评估中不存在虚警。
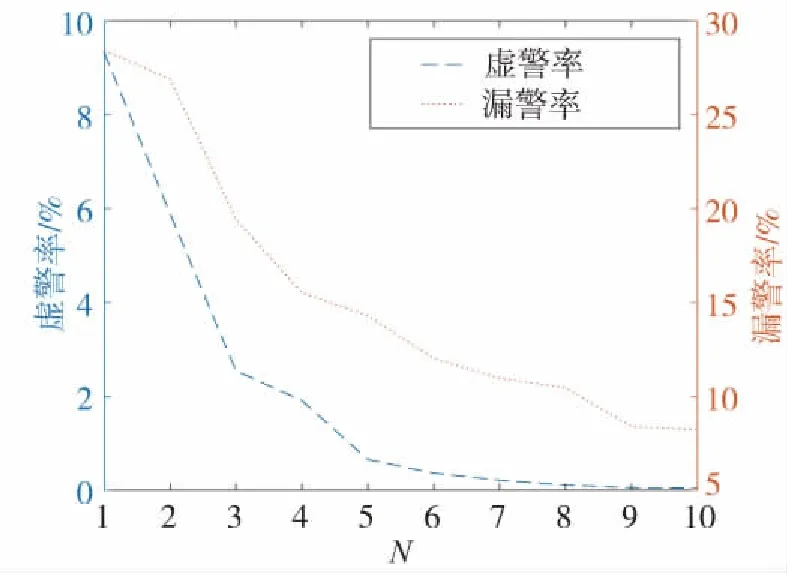
图4 漏警率、虚警率与系统个数的关系Fig.4 The relationship between false dismissal/alarm rate and system amount
综上可以看出,本文提出的信息质量评估方法,无论漏警率还是虚警率,均优于传统方法。同时,随组合导航系统中的系统个数的增大,虚警率与漏警率均呈现下降趋势。因此,本文提出的信息质量评估方法具有很好的准确性与鲁棒性。
4 结论
针对多源组合导航系统中容易引入低质量信息的问题,分析了虚警率与漏警率的影响因素,提出了一种基于一致性检验的多源组合导航系统信息质量评估方法。该方法比传统方法具有更低的虚警率与漏警率;同时随着组合导航系统数量的增加,虚警率与漏警率均呈现持续下降趋势。仿真实验结果表明了该方法的有效性。
[1] 陈空,宋春雷,陈家斌,等. 基于改进WKNN的位置指纹室内定位算法[J]. 导航定位与授时, 2016, 3(4):58-64.
[2] He Z, Petovello M. Performance comparison of Kalman filter and maximum likelihood carrier phase tracking for weak GNSS signals[C]//2015 International Conference on Indoor Positioning and Indoor Navigation (IPIN). IEEE, 2015: 1-8.
[3] Deng Z, Yu Y, Yuan X, et al. Situation and development tendency of indoor positioning[J]. China Communications, 2013, 10(3): 42-55.
[4] Zhuang Y, Syed Z, Li Y, et al. Evaluation of two WiFi positioning systems based on autonomous crowdsourcing of handheld devices for indoor navigation[J]. IEEE Transactions on Mobile Computing, 2016, 15(8): 1982-1995.
[5] 肖竹, 于全, 易克初, 等. 适用于 NLOS 环境的UWB定位方案研究[J]. 通信学报, 2008, 29(4): 1-7.
[6] Kawai Y, Yokokura Y, Ohishi K, et al. High-robust acceleration control using force and position sensors integrated disturbance observer[C]//IECON 2016-42ndAnnual Conference of the IEEE Industrial Electronics Society. IEEE, 2016: 5802-5807.
[7] 尹明新,武勇,冀华. 多传感器对编队目标无源定位的数据关联技术研究[J]. 导航定位与授时, 2016, 3(6):12-16.
[8] Innac A, Bhuiyan M Z H, Söderholm S, et al. Reliability testing for multiple GNSS measurement outlier detection[C]//2016 European Navigation Conference (ENC). IEEE, 2016: 1-8.
[9] 梁洪宝, 顾焕杰, 王友. GNSS 观测数据质量对坐标解算精度的影响分析[J]. 测绘科学, 2016, 41(5): 5-9.
[10] 杨军玲. 无源定位跟踪中野值的检测与剔除方法[J]. 电子科技, 2016, 29(6): 51-53.
[11] Ger M, van Ommeren C, Westenkirchner M, et al. Multiple model concepts in navigational applications[C]//2016 DGON Intertial Sensors and Systems (ISS). IEEE, 2016: 1-20.
[12] 张磊, 汪渤. 抗野值H∞滤波在组合导航中的应用[J]. 北京理工大学学报, 2009, 29(7): 600-604.
[13] 肖甫, 沙朝恒, 陈蕾,等. 基于范数正则化矩阵补全的无线传感网定位算法[J]. 计算机研究与发展, 2016, 53(1): 216-227.
[14] Xiao Q, Bu K, Wang Z, et al. Robust localization against outliers in wireless sensor networks[J]. ACM Transactions on Sensor Networks (TOSN), 2013, 9(2): 24.
[15] 何伟, 廉保旺, 张玲玲. 模糊控制辅助的 GNSS/INS 深耦合跟踪算法[J]. 西北工业大学学报, 2016(1): 98-105.
[16] Chen C, Han Y, Chen Y, et al. Indoor GPS with centimeter accuracy using WiFi[C]//2016 Asia-Pacific Signal and Information Processing Association Annual Summit and Conference (APSIPA). IEEE, 2016: 1-4.
[17] 邓中亮, 余彦培, 徐连明, 等. 室内外无线定位与导航[M]. 北京: 北京邮电大学出版社, 2014.
AnInformationQualityAssessmentMethodforMulti-sourceIntegratedPositioningSystem
YIN Lu, DENG Zhong-liang, ZHU Di, HU En-wen
(School of Electronic Engineering, Beijing University of Posts and Telecommunications, Beijing 100876, China)
Multi-source integrated positioning system can provide more accurate and robust positioning. However, it might introduce more low-quality signals as there are more systems. A new information quality assessment method for multi-source integrated positioning system has been proposed for the aforementioned problem. The influence factors of false alarm rate and false dismissal rate have been analyzed based on the information quality assessment method for single positioning system. Because more systems have more redundant information, the proposed information quality assessment method uses all of those information by employing the consistency check. According the simulation and experiment results, both the false alarm rate and false dismissal rate have been reduced by using the proposed method. Moreover, with the increasing of the system amount, the two rates have reduced continuously which means the proposed method has an excellent performance.
Multi-source integrated positioning; Information quality assessment; Consistency check; False alarm rate; False dismissal rate
10.19306/j.cnki.2095-8110.2017.06.012
TN967.2
A
2095-8110(2017)06-0075-05
2017-07-02;
2017-09-13
国家高技术研究发展计划(863计划)(2015AA124101)
尹露(1987-),男,博士,讲师,主要从事卫星定位、组合导航方面的研究。E-mail: inlu_mail@bupt.edu.cn
