非对称结构损伤飞机鲁棒容损控制器设计
2017-12-06左翩翩董希旺李清东
左翩翩,徐 兵,董希旺,李清东,任 章
(1.北京航空航天大学 自动化与电气工程学院飞行器控制一体化技术国防科技重点实验室,北京 100191;2.中国软件与技术服务股份有限公司,北京100081)
非对称结构损伤飞机鲁棒容损控制器设计
左翩翩1,徐 兵2,董希旺1,李清东1,任 章1
(1.北京航空航天大学 自动化与电气工程学院飞行器控制一体化技术国防科技重点实验室,北京 100191;2.中国软件与技术服务股份有限公司,北京100081)
当飞机发生非对称结构损伤时,飞机的质量、重心位置和气动特性都会发生突变,飞机机体的对称性遭到破坏,致使飞机的横纵向间运动产生强烈的耦合。针对飞机发生非对称结构损伤时导致的飞行控制问题,建立了非对称结构损伤飞机的损伤模型,并基于一种新型鲁棒容损控制策略,采用非线性扩张状态观测器和非线性动态逆相结合的方法,对飞机的姿态控制器进行了设计,兼顾了飞机系统的性能和对损伤的鲁棒性。最后,基于NASA的通用运输机模型,对所设计控制器的控制效果进行了仿真验证。仿真结果表明,设计的姿态控制器有效地抑制了非对称结构损伤给飞机控制系统带来的不确定性和扰动,具有较好的控制性能。
非对称结构损伤;鲁棒容损控制;非线性动态逆;非线性扩张状态观测器
0 引言
飞机发生非对称结构损伤时,会导致飞机的质量、重心和气动特性发生突变,从而破坏了飞机的轴向对称性,使得飞机变得难以控制,对飞机的飞行安全造成了威胁,严重时甚至会导致灾难性的后果。因此,研究具有较强鲁棒性的容损控制方法,使飞机在发生非对称结构损伤后仍能保持飞机姿态的稳定,并具有一定的飞行性能,对保障飞机的飞行安全具有重要意义[1-2]。
为解决这一问题,国内外学者进行了一系列相关的研究。文献[3]通过风洞实验对不同损伤情况下的飞机进行了气动特性研究和分析,为之后损伤飞机的建模打下了基础。文献[4]采用微元法,对受到非对称损伤的飞机进行了动力学建模,得到了较为准确的损伤飞机模型。在控制器设计方面,文献[5-8]针对非对称受损的常规布局飞机,设计了基于系统高频增益矩阵LDS 分解的多变量模型参考自适应控制器,并对其适用条件进行了研究。为了提高控制的快速性和精确性,文献[9]在多变量模型参考自适应控制器的基础上,设计了非线性扩展状态观测器用以估计损伤干扰的大小。文献[10]通过分析将结构非对称受损飞机的控制转化为对扰动等不确定性因素的抑制问题,提出了一种基于扩张状态观测器的轨迹线性化控制方法,并进行了损伤飞机飞行控制律的设计,使系统具有较强的鲁棒性。文献[11]针对结构损伤飞机,在非奇异终端滑模控制方法的基础上,结合自适应调节率,提出了自适应非奇异终端滑模控制方法,有效地提高了控制的快速性。文献[12]以机翼非对称受损飞机为研究对象,采用质量微元法建立重心偏移飞机的动力学模型,分析了其动态特性,并设计了基于自抗扰控制的姿态控制器。由此可见,在非对称结构受损飞机的建模和控制方法上已经取得了一些阶段性的成果,但大部分控制器的设计往往针对线性模型,需要对不同的工作点进行多次设计,较为繁琐;同时,设计控制器时多针对飞机损伤较为严重的情况,故而难以同时满足正常飞机较高的飞行性能和对损伤的鲁棒性。因此,针对非线性模型的容损控制方法仍有待进一步的研究。
本文首先建立了非对称损伤飞机的非线性动力学模型;其次,基于一种新型鲁棒容损控制器结构,采用非线性扩张状态观测器(Nonlinear Extended State Observer, NESO)和非线性动态逆(Nonlinear Dynamic Inverse, NDI)相结合的方法,针对非对称结构损伤飞机进行了姿态控制器的设计,同时兼顾了飞机的飞行性能和对损伤的鲁棒性;最后,采用NASA的通用飞机模型(Generic Transport Model,GTM)来进行数字仿真,验证了该方法的有效性。
1 非对称损伤飞机模型
非对称结构损伤,例如翼尖折损,通常会给飞机的质量、重心的位置和气动系数带来突然的变化,导致飞机机体纵向对称性遭到破坏。因此,正常飞机建模时,机体关于纵向对称的假设不再成立,需重新建立损伤飞机的模型。
由于损伤前后飞机传感器的位置不发生变化,测量时仍参考的是未受损伤前的重心位置。因此,选取损伤前飞机重心的位置为机体坐标系原点。损伤飞机的数学模型为:
(3)
其中,m为损伤后飞机的总质量;l为发动机安装位置到坐标系原点的距离;[uvw]T为飞行速度在机体坐标轴系各轴上的速度分量;ω=[pqr]T为体轴下的角速度;φ、θ、ψ为飞机的姿态角;[ΔxΔyΔz]T为飞机损伤后重心相对于原重心的位置在机体坐标轴系各轴上的偏移量;F=[FxFyFz]T为体轴下飞机受到的气动力;TL和TR为飞机左右两侧的推力,并假设其方向与机体x轴平行;M=[LMN]T为体轴下飞机受到的气动力矩;Ix、Iy、Iz为正常飞机的转动惯量;Ixy、Ixz、Iyz为正常飞机的转动惯量积。
由于飞机损伤的质量相比于飞机的总质量来说非常小,故可认为飞机损伤前后的质量一样。对式(2)进行化简和整理,可将其写成仿射非线性形式,有

(4)
其中
f(x)=I-1ω×Iω
(5)
g(x,δ)=I-1M(x,δ)
(6)
(7)
(8)
式中,Id=I+ΔI,I为正常飞机的转动惯量矩阵,ΔI为飞机损伤后转动惯量的改变量。M(x,δ)为正常飞机的气动力矩,ΔM(x,δ)为飞机损伤后气动力矩的改变量,M(x,δ)和ΔM(x,δ)的表达式为:
(9)

(10)
(11)

由此可见,飞机发生非对称损伤后,主要的影响来自于重心偏移导致的转动惯量改变和由于外形改变导致的气动参数变化。而式(2)可看成由正常飞机的转动运动f(x)+g(x,δ)和由损伤导致的转动运动Δf(x)+Δg(x,δ)组成。
2 鲁棒容损控制器设计
由于基于鲁棒控制的被动容损控制器在设计时考虑的多为系统可能出现的最大故障,因此,即使系统无故障时,能达到的性能也非常有限,难以兼顾系统的控制性能和对损伤的鲁棒性。本文采用一种新型鲁棒容损控制器结构[13]来进行飞机姿态控制器的设计。
非线性系统新型鲁棒容错控制器结构如图1所示,它的特别之处在于将控制器的设计分为两部分,一部分是以跟踪误差为输入的主控制器,一部分是以观测误差为输入的补偿控制器,且两种控制器可分开设计,同时兼顾系统的性能和鲁棒性[14]。本文中主控制器采用非线性动态逆控制方法,主要考虑系统的性能;补偿控制器则根据非线性扩张状态观测器对扰动的观测值进行补偿,用以消除损伤带来的扰动。
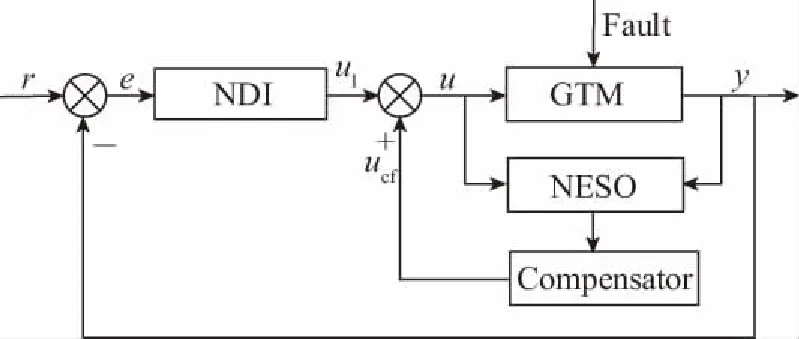
图1 鲁棒容损控制器结构Fig.1 The robust fault-tolerant control structure
2.1 非线性动态逆控制器设计
非线性动态逆控制器设计为内外双环控制结构,外环为角度控制回路,内环为角速度控制回路。
设期望的姿态角速度模型为
(12)
式中,pc、qc、rc为转动角速度指令,kp、kq、kr为常值增益,根据期望的动态特性确定。
对于未受损的飞机,由式(4)可得内环动力学模型为

(13)
根据式(9)和式(13),内环动态逆控制器可设计为
(14)
设期望的姿态角模型为
(15)
式中,φc、θc、ψc为姿态角指令,kφ、kθ、kψ为常值增益,根据期望的动态特性确定。
根据式(3),外环动态逆控制器可设计为
(16)
2.2 非线性扩张状态观测器设计
根据式(4),设计3个非线性扩张状态观测器分别对角速度p、q、r通道上的扰动进行观测。

(17)
对式(17)描述的扩张系统建立二阶扩张状态观测器,则有:
(18)
其中,βi1、βi2为适当的参数,fic(ei1)为适当的非线性函数,这里取
fic(ei1)=fal(ei1,α,δ)=
(19)
非线性扩张状态观测器的性能主要受观测器的设计参数影响,参数一般根据经验进行选择。选择合适的βi1、βi2,有zi1→xi1,zi2→xi2,即作为扩张状态量的扰动可以被很好地估计出来,z12、z22、z32即为非线性扩张状态观测器观测出来的扰动。
2.3 补偿控制器设计
令z2=[z12z22z32]T为非线性扩张状态观测器观测出来的扰动量,仍使用飞机原有执行机构进行补偿,则有
(20)
则补偿控制器可设计为
ucf=CIz2
(21)
其中,
(22)
3 仿真结构与分析
本文采用NASA GTM模型进仿真验证。仿真初始条件取高度为800英尺,飞行速度为75节;控制器设计参数为kφ=kθ=kψ=2,kp=kq=kr=10;观测器设计参数为δ=0.025,βi1=βi2=300(i=1,2,3)。仿真共进行25s,在第10s飞机进入稳定飞行时,飞机左边外侧后缘襟翼丢失,其仿真结果如图2~图5所示。
图2所示为新型鲁棒容损控制器和传统PID控制器控制效果的对比图。当飞机从初始状态进入到稳定飞行后,飞机的机翼发生了非对称结构损伤,给系统带来了不确定的扰动。由图2中可以看出,新型鲁棒容损控制器对损伤扰动具有更快速的响应和更平稳的过渡阶段,表明新型鲁棒容损控制器具有更好的控制效果。
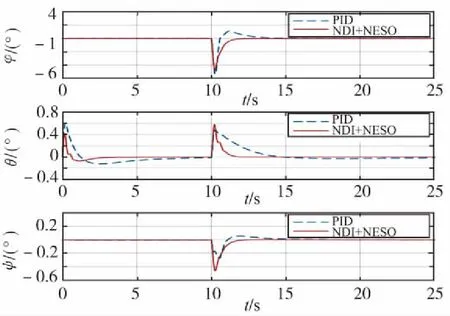
图2 姿态角控制响应Fig.2 The attitude angle control response
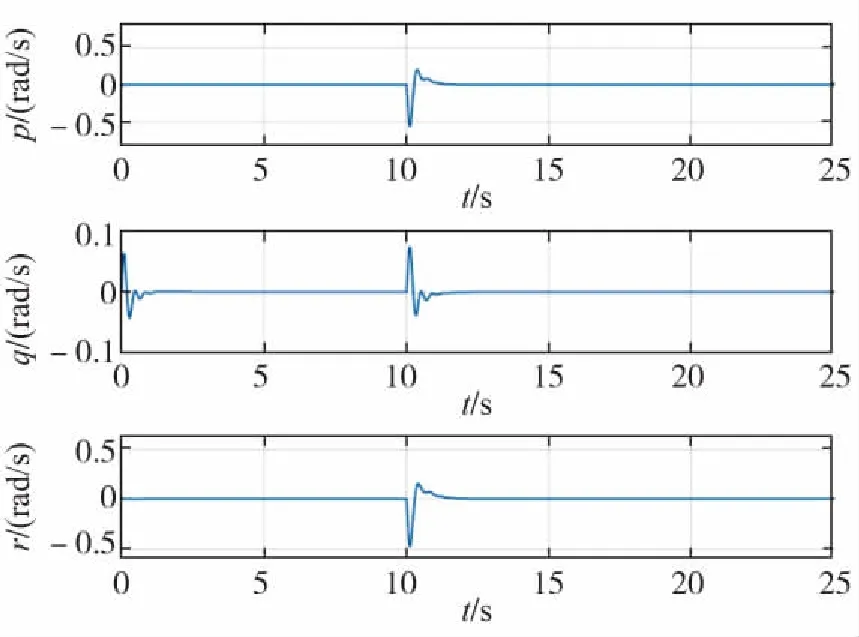
图3 角速度控制响应Fig.3 The angular velocity response
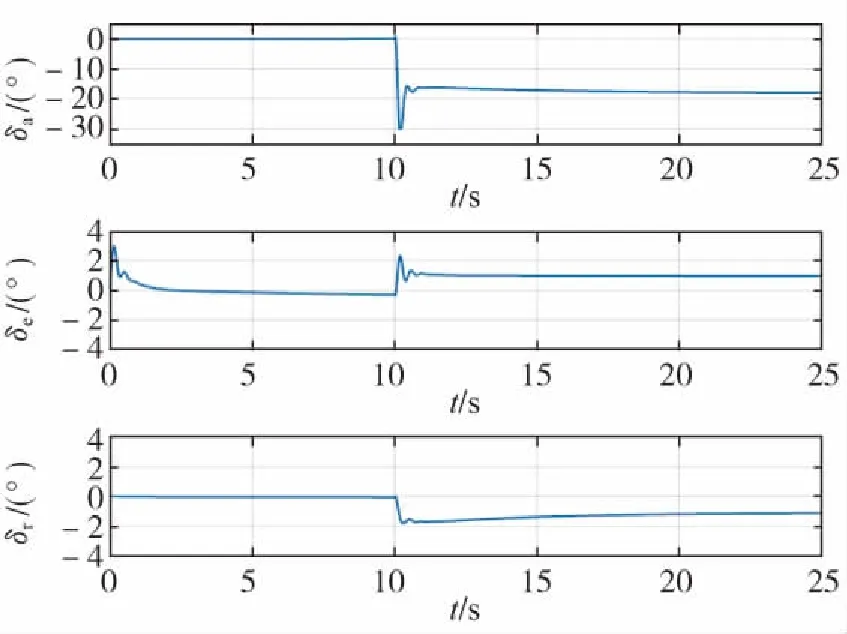
图4 舵面偏转响应Fig.4 The actuator deflection response
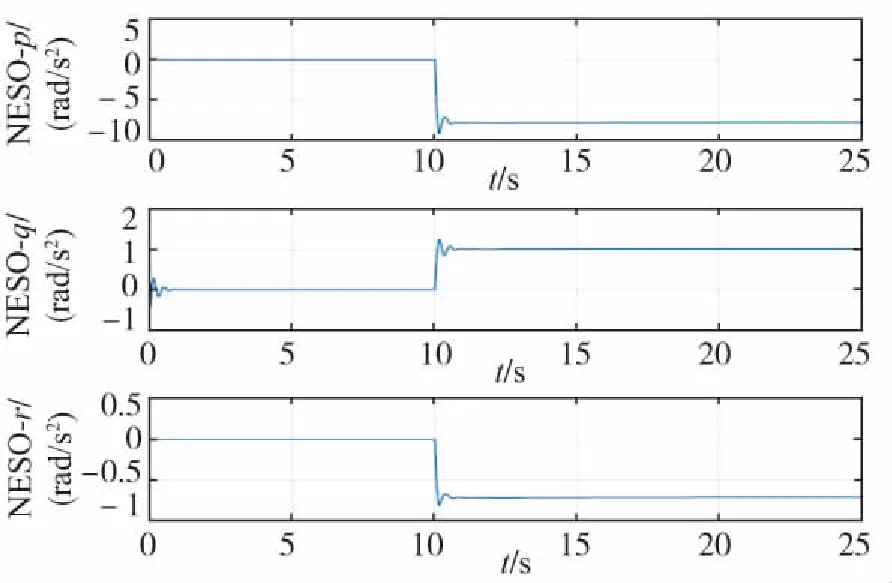
图5 NESO对扰动的观测值Fig.5 The estimated value of the NESO
图3、图4、图5所示分别为姿态角速度控制响应、舵面偏转响应和NESO对扰动的观测值。从图中可以看出,当飞机发生非对称结构损伤时,NESO能快速对各通道上的扰动进行观测;同时, 为补偿损伤带来的干扰力矩,操纵舵面的偏转值发生明显变化。
4 结论
本文研究了非对称结构损伤飞机的姿态控制问题。结合非对称损伤飞机的特性,建立了非对称损伤飞机的动力学模型。并在此基础上,采用非线性扩张状态观测器和非线性动态逆控制器相结合的方法,设计了一种基于新型鲁棒容损控制器构型的姿态控制器,并对其控制性能进行了仿真验证。仿真结果表明,设计的姿态控制器能够实时补偿由于损伤引起的干扰力矩,有效地抑制了结构受损带来的不确定性和扰动,具有较好的控制性能和容损性能。
[1] 姚武文, 周平, 蔡开龙. 飞机容损飞行机理与控制方法研究 [J]. 航空维修与工程, 2010(2):54-56.
[2] 黄帅 , 李正强, 乔文峰, 等. 大型民机可重构飞行控制系统研究 [J]. 航空制造技术, 2015(4):92-95.
[3] Shah G H. Aerodynamic effects and modeling of damage to transport aircraft[R]. AIAA 2008-6203, 2008.
[4] Bacon B J,Gregory I M. General equations of motion for a damaged asymmetric aircraft [C]//AIAA Atmospheric Flight Mechanics Conference and Exhibition, 2007.
[5] Guo J, Tao G, Liu Y. Multivariable adaptive control of NASA generic transport aircraft model with damage [J]. Journal of Guidance, Control and Dynamics, 2011, 34(5):123-135.
[6] Guo J , Tao G. A multivariable MRAC scheme applied to the NASA GTM with damage [R]. AIAA 2010-8014, 2010.
[7] Liu Y, Tao G. Multivariable MRAC for aircraft with abrupt damages [C]//IEEE American Control Conference. Washington, 2008:2981-2986.
[8] 杨凌宇, 冷宁, 张晶, 等. 非对称受损飞机多变量模型参考自适应控制 [J]. 北京航空航天大学学报, 2013, 39(11):1509-1514.
[9] Wang Y, Yang L, Zhang J, et al. An observer based multivariable adaptive reconfigurable control method for the wing damaged aircraft [C]// IEEE International Conference on Control amp; Automation, 2014.
[10] 钟友武 , 倪少波, 杨凌宇, 等. 结构受损飞机动力学模型与飞行控制方法 [J]. 北京航空航天大学学报, 2013, 39(2):154-158.
[11] Jia P, Zhang J, Yang L. Adaptive non-singular terminal sliding mode control for structural damaged aircraft [C]//IEEE Chinese Control Conference, 2015.
[12] 胡海燕, 温阳, 杨凌宇, 等. 基于自抗扰控制的机翼受损飞机姿态控制器设计 [J]. 飞行力学, 2013, 31(3):239-243.
[13] Zhou K, Ren Z. A new controller architecture for high performance, robust and fault-tolerant control [J]. IEEE Transactions on Automatic Control, 2001, 46(10):1613-1618.
[14] Li Q, Ren Z, Dai S, et al. A new robust fault-tolerant controller for self-repairing flight control system [J]. Journal of the Franklin Institute, 2013, 350(9):2509-2518.
DesignofRobustFault-TolerantControllerforAircraftwithAsymmetricStructuralDamage
ZUO Pian-pian1, XU Bing2, DONG Xi-wang1, LI Qing-dong1, REN Zhang1
(1.School of Automation Science and Electrical Engineering, National Key Laboratory of Science and Technology on Aircraft Control, Beihang University,Beijing 100191,China;2. China National Software amp; Service Co., Ltd., Beijing 100081,China)
Asymmetric structural damage will cause unknown changes to the aircraft mass, center of gravity and aerodynamic characteristics, which will destroy the body longitudinal symmetry and bring strong coupling effects. Focusing on the flight control problem of the aircraft with asymmetric structure damage, this paper presents a robust fault-tolerant control strategy based on nonlinear extended state observer and nonlinear dynamic inverse, which well balances the system performance and the tolerance of damage. Firstly, the dynamic model of the aircraft with asymmetric structure damage was established. Then, an attitude controller was designed based on the proposed strategy. Finally, simulations were carried out to demonstrate the control effect with NASA Generic Transport Model. Results show that the flight performance is well ensured after asymmetric structure damage occurring.
Asymmetric structural damage; Robust fault-tolerant control; Nonlinear dynamic inverse; Nonlinear extended state observer
10.19306/j.cnki.2095-8110.2017.06.009
V249.122
A
2095-8110(2017)06-0056-05
2017-06-12;
2017-07-18
国家自然科学基金(61503009, 61333011, 61421063)
左翩翩(1993-),女,硕士,主要从事大飞机容错控制方面的研究。E-mail:zpp51515@buaa.edu.cn
