混合动力电动汽车通信设计
2017-11-07胡艳峰
唐 键,胡艳峰
(陕西重型汽车有限公司,陕西 西安 710200)
混合动力电动汽车通信设计
唐 键,胡艳峰
(陕西重型汽车有限公司,陕西 西安 710200)
详细介绍混合动力电动汽车的基本概念、分类、拓扑以及CAN通信设计,并给出了通信设计中的信号说明。
混合动力电动汽车;概念;分类;拓扑;CAN通信设计
基于清洁能源及环境保护的需要,电动汽车将会在人类生活中扮演越来越重要的角色。电动汽车以其零排放、环境友好的特点,受到广泛的认可与关注。但是电动汽车也存在一个硬伤,即一次充满电的续驶里程比较短,且由于充电站设施的不完善,使得电动汽车没电后不能像传统燃油车一样,能很快得到电能补充。这个问题很大程度上限制了电动汽车的快速普及。基于此类原因,混合动力电动汽车应运而生。混合动力电动汽车既能很大程度上减少排放,又能弥补纯电动汽车续驶里程方面的不足,因此也是新能源车辆领域关注的一个焦点。尤其是在大、中、重型商用车领域,由于车货总质量大的因素,想要实现完全纯电动零排放,技术上虽然可行,但实际使用效果并不理想,对大部分用户而言,纯电动汽车不但昂贵,而且使用受限制,因此无法快速普及。本文将针对混合动力电动汽车的CAN通信设计来展开介绍。
1 混合动力汽车基本概念
混合动力电动汽车(HEV)是指有多种动力参与汽车驱动,一般指的是燃油发动机和驱动电机这2种动力。混合动力系统主要由整车控制器、发动机控制器、发动机、电机控制器、驱动电机、电池管理系统、动力电池等组成。车辆行走可单独由驱动电机或发动机驱动,此时动力源为驱动电机或发动机。车辆行走也可由驱动电机和发动机共同驱动,此时动力源为驱动电机和发动机二者协调作用。整车控制器为系统核心,协调整车电机控制器、电池管理系统、自动变速器控制器、发动机控制器等协调工作。整个系统可以根据需求配备单电机系统或者双电机系统。
2 混合动力汽车分类
混合动力汽车按照不同分类标准会有不同的分类。本文中根据混合动力电动汽车零部件的种类、数量和连接关系,将其分为3类[1]:①串联式混合动力电动汽车;②并联式混合动力电动汽车;③混联式混合动力电动汽车。下面分别介绍这3种类型的混合动力电动汽车。
2.1 串联式混合动力电动汽车
串联式混合动力电动汽车系统结构如图1所示。串联式结构是由发动机、发电机和驱动电机3大主要部件总成组成的。发电机仅仅用于发电,发电机发出的电能通过驱动电机控制器直接输送给驱动电机,由驱动电机驱使汽车行走。当电池组电量充足时,电池组直接向驱动电机提供能量驱使汽车行走;当电池组电量不足时,发动机带动发电机发电向电池充电,来延长混合动力电动汽车的续驶里程。

图1 串联式混合动力电动汽车结构示意图
2.2 并联式混合动力电动汽车
并联式混合动力电动汽车系统结构如图2所示。该结构主要由发动机、驱动电机/发电机2大部件总成构成。其有多种组合形式,可以根据使用要求选用,且2大动力总成的功率可以互相叠加。其优点是行程比串联式混合动力电动汽车要长一些,且更加趋近于内燃机汽车。
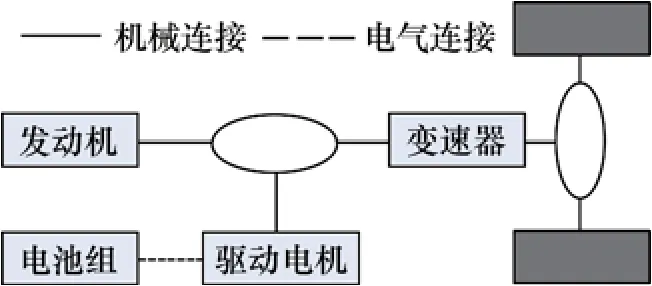
图2 并联式混合动力电动汽车结构示意图
2.3 混联式混合动力电动汽车
混联式驱动系统是串联式和并联式的综合,其结构示意图如图3所示。发动机发出的功率一部分通过机械传动输送给驱动桥,另一部分则驱动发电机发电。发电机发出的电能输送给驱动电机或电池组,驱动电机产生的驱动力矩通过动力复合装置传送给驱动桥。混联式驱动系统的控制策略是:在汽车低速行驶时,驱动系统主要以串联方式工作;当汽车高速稳定行驶时,驱动系统则以并联工作方式为主。
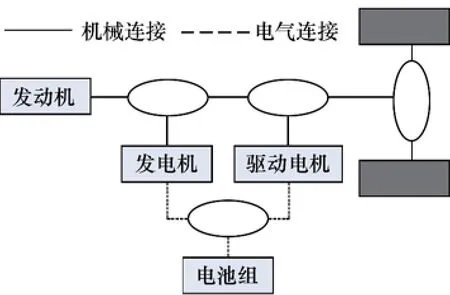
图3 混联式混合动力电动汽车结构示意图
本文主要基于商用车,就串联式和并联式2种混合动力电动汽车进行通信设计说明。
3 混合动力汽车CAN总线拓扑
3.1 串联式混合动力电动汽车CAN总线拓扑
串联式混合动力汽车,汽车行业内也称为增程式电动汽车,指整车配备有辅助动力单元(APU,也称为增程器)的电动汽车。增程器系统包括APU控制器、发电机及发电机控制器、发动机及发动机控制器。增程器的作用是:在电池电量不足的情况下,开启增程器发电给电池充电,从而达到增加整车续驶里程的目的。增程式电动汽车中,发动机不直接驱动车辆运行,而是通过发电机发电给电池充电,由驱动电机直接驱动车辆运行。从这里可以看出,增程式电动汽车,本质上是串联式混合动力汽车。对整车而言,增程器是作为一个整体而存在的,即增程器是作为一个节点挂在整车网络上。如图4所示,虚线框内的部分即为整个增程器系统,作为一个节点挂在整车CAN网络上。发电机控制器和发动机控制器只存在增程器系统内部CAN网络上,和整车控制器不直接通信,信息交互需要通过增程器控制器。

图4 并联式混合动力汽车拓扑
3.2 并联式混合动力电动汽车CAN总线拓扑
由并联式混合动力汽车的概念可知,整车配备有发动机、驱动电机2种驱动源。当电池电量充足时,由驱动电机驱动车辆行驶;当电池电量不足时,发动机工作直接驱动车辆行驶或与驱动电机一起驱动车辆行驶。对整车而言,发动机是作为一个单独节点挂在整车网络上的,与整车控制器之间可以直接进行信息交互,如图5所示。
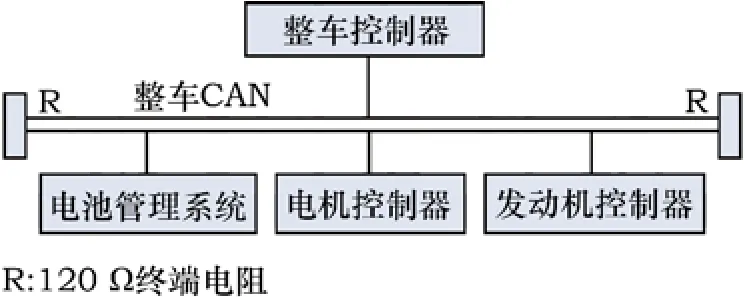
图5 并联式混合动力汽车拓扑
4 混合动力汽车CAN总线通信设计
4.1 串联式混合动力电动汽车
串联式混合动力电动汽车中,增程器是作为一个节点挂在整车网络上,因此信息的交互只存在于整车控制器和增程器控制器二者之间。增程器内部通信网络中,发动机控制器、发电机控制器与增程器控制器之间分别进行信息交互。整车如果想要知道发动机或发电机的相关总线信息,必须通过增程器控制器转发。同样,整车控制器对发电机及发动机的控制,也转化成对增程器系统的控制,因此发动机、发电机的具体控制都由增程器控制器来进行。串联式中整车控制器与增程器控制器、驱动电机控制器之间信息交互见表1。
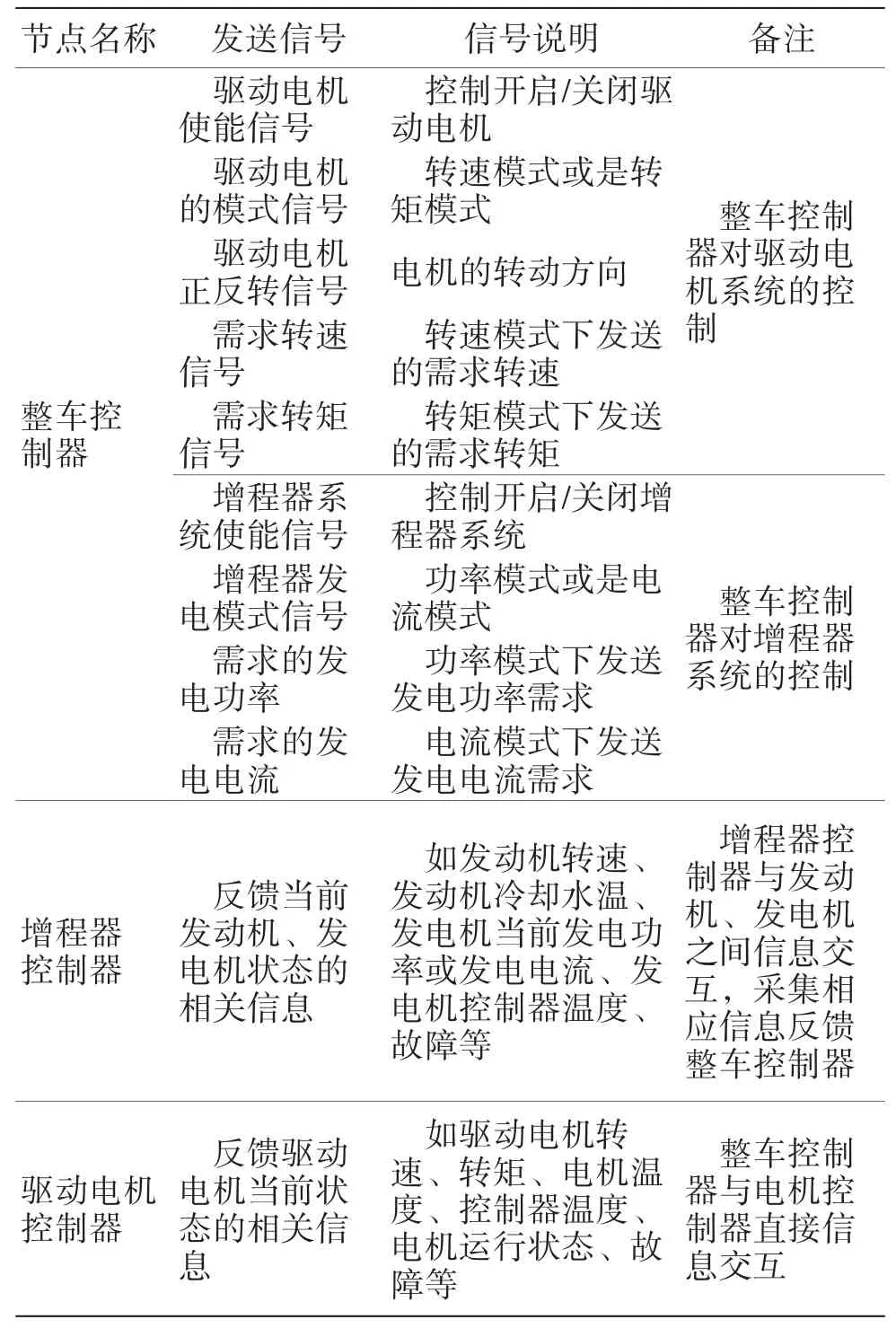
表1 串联式信息交互
从表1可以看出,对于串联式,整车控制器是对驱动电机控制器和增程器控制器进行协调控制,从而确保整车的运行。而对增程器系统内部的通信、控制方式不去关注。整车只要提出想要关心的信息,让增程器控制器反馈即可。发动机的开启和关闭均由增程器控制器来控制。
4.2 并联式混合动力电动汽车
并联式混合动力电动汽车中,发动机作为一个独立节点挂在整车网络上。因此,整车控制器需要同时对发动机和驱动电机进行协调控制。并联式中整车控制器与发动机控制器、驱动电机控制器之间信息交互见表2。
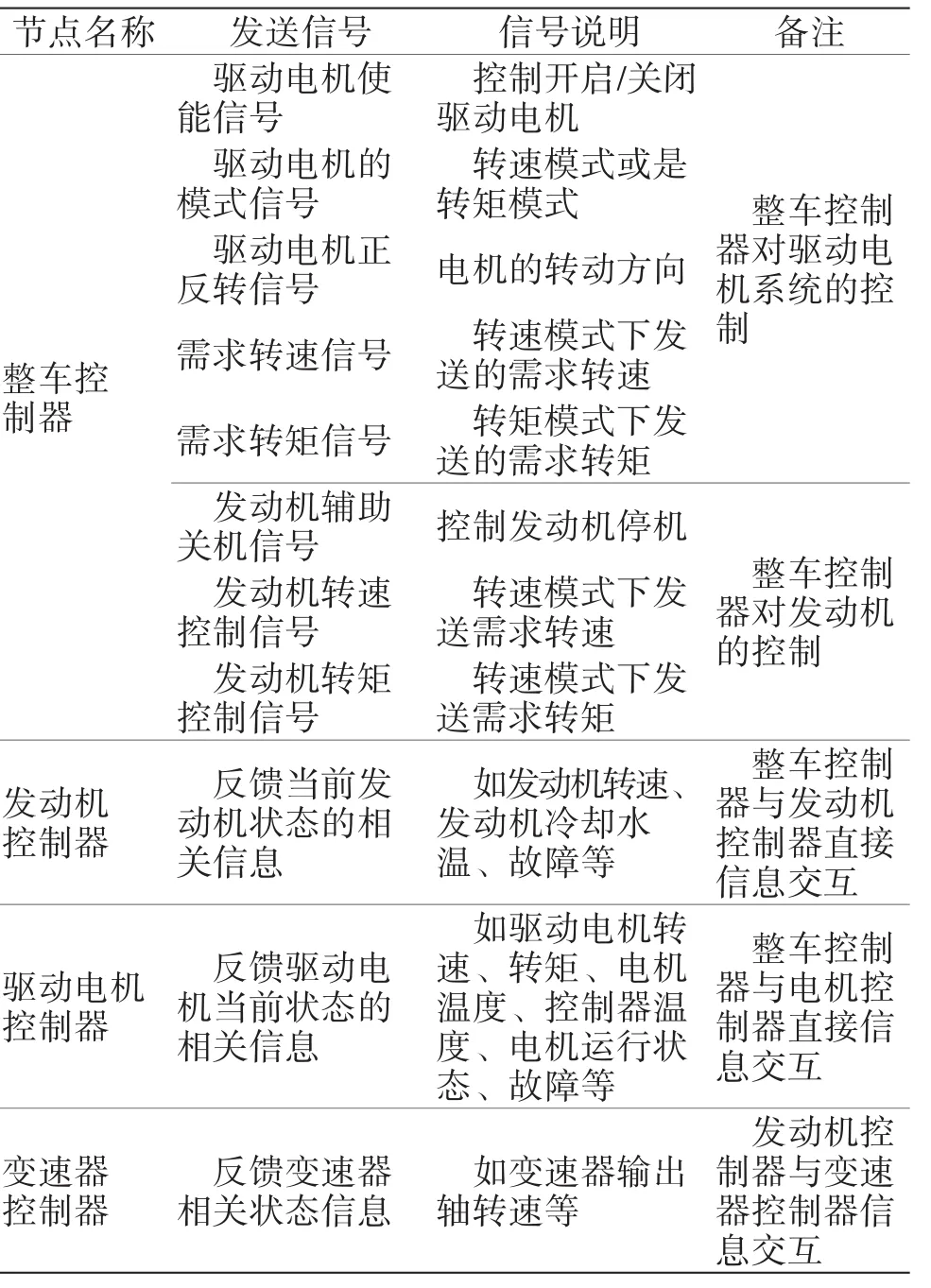
表2 并联式信息交互
从表2可以看出,并联式混合动力电动汽车,整车控制器对发动机和驱动电机进行协调控制,而整车控制器直接对发动机控制。由于传统燃油车型中并没有整车控制器,发动机厂家开放的是其它的控制单元,例如潍柴发动机开放的控制节点是变速器。因此,整车控制器想要控制发动机,目前需借用燃油车发动机已经开放的发动机控制报文。SAE J1939标准对发动机的相关报文都给出了明确的规定,各个商用车的发动机厂家都是按照该标准执行的,因此整车控制器借用对发动机的控制报文也应该遵循该标准,否则发动机控制器将无法识别。
这里有2点要注意:一是表2中只是给出了发动机的停机信号命令,并没有给出发动机的起动信号命令。这是因为在并联式混合动力电动汽车驱动行驶中,低速情况下只需要驱动电机驱动即可;在高速稳定行驶情况下,当驱动电机驱动能力不足时,驱动电机会带动发动机起动,随后发动机将参与到驱动整车行驶。二是变速器控制器发出的变速器输出轴转速信号的作用,是为了对发动机进行保护。这是因为并联式中发动机的起动一般都是在车辆已经起动后才开启的,因此起动后需要发动机能够立刻输出扭矩,跳过怠速控制模式而直接进入驱动模式。变速器输出轴转速大于0表明在行车状态,因此发动机可以根据此信号的反馈值进入合理的控制方式。
5 混合动力电动汽车CAN报文定义
首先来整理涉及到的节点,节点详细信息见表3。

表3 节点信息
5.1 串联式
串联式混合动力电动汽车信号见表4。
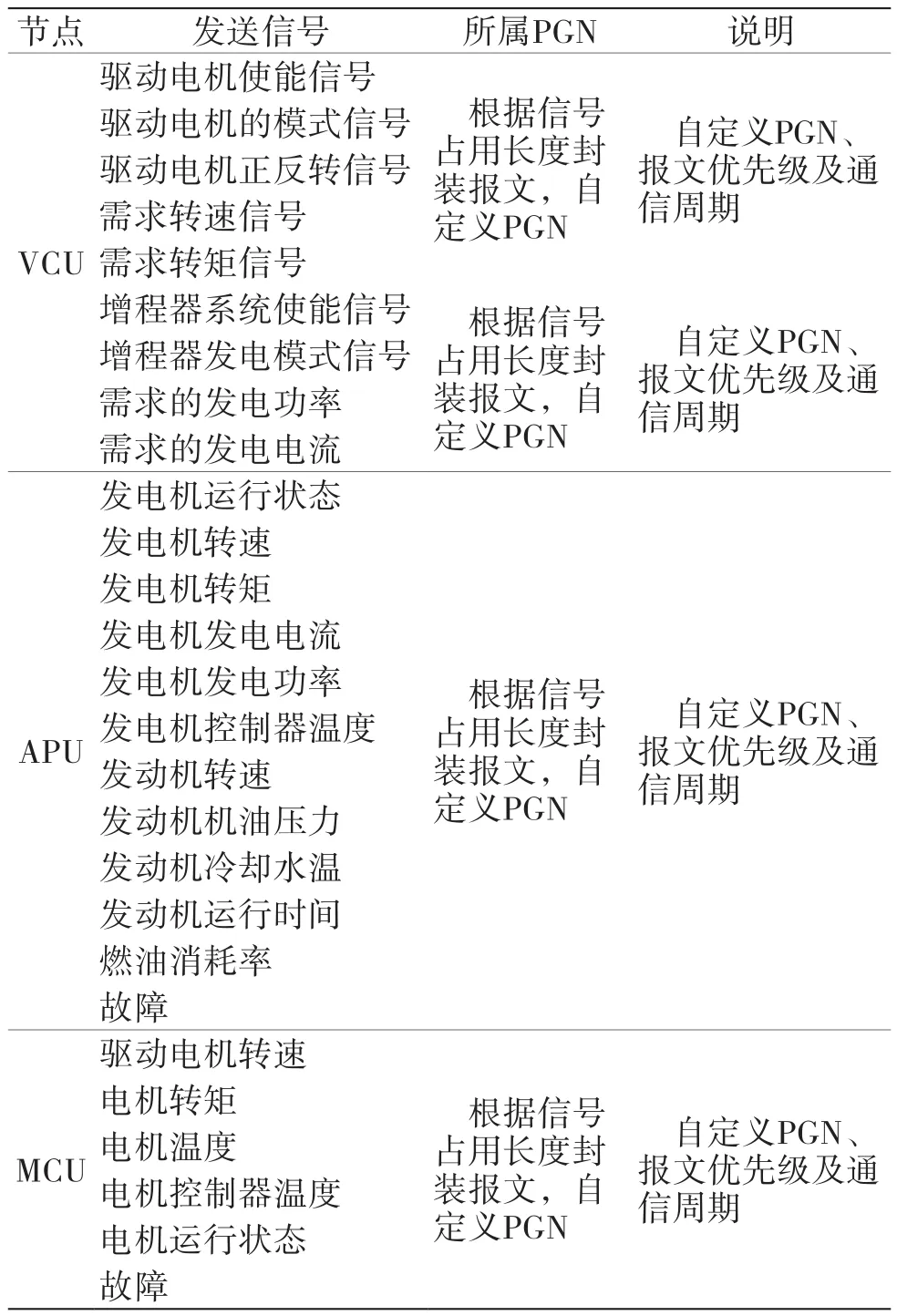
表4 串联式信号列表
由表4可以看出,PGN都要自定义。自定义PGN要注意,应在SAE J1939的PGN预留区进行分配,并根据信号的刷新速率的要求,最终给出合理的PGN、优先级及通信周期。
5.2 并联式
并联式混合动力电动汽车信号见表5。

表5 并联式信号列表
由表5可以看出,除发动机PGN,其它都要自定义。发动机PGN标准已有规定[2],按规定执行即可。发动机信号有一点要注意的是,发动机运行时间所在的PGN,通信周期是On request,要想获得这个报文的信息,需要发送请求PGN来请求发动机控制器发送(详细介绍见第6章)。
6 请求PGN
SAE J1939-21数据链路层中规定了目前共支持5种类型的消息,分别为:命令、请求、广播/响应、确认和组功能[3]。消息的具体类型可由其分配的参数组编号(即PGN)识别。CAN数据帧数据域中的多字节参数,先存放最低字节。上述的要想获得发动机运行时间这个信号,就需要用到请求类型的消息。
请求类型的消息提供了从全局范围或从特定目标地址请求信息的能力。对特定目标地址的请求称为指向特定目标地址的请求。请求PGN的定义见表6。

表6 请求PGN定义
在这里,是整车控制器请求获得发动机运行时间信号,PGN为(65253)10=(00FEE5)16,理论上请求报文应该见表7。

表7 整车控制器请求报文
表7中,标识符为18EA00D0,表示优先级6级,整车控制器(源地址D0)请求发动机控制器(源地址0)发送请求的PGN信息,理论上是可行的。但是,由于目前的发动机厂家都没有开放对源地址D0的相应信息,表7中的请求报文发动机根本无法识别。因此,需要具体情况具体对待,借用发动机开放识别源地址进行请求。例如玉柴的某款发动机可以识别的是源地址是21的请求报文,因此表7中标识符应该为18EA0021,这样才可以正确获得想要的请求信息。
在这里需要指出的一点是,串联式混合动力电动汽车中,整车如果想要知道发动机运行时间信息,则要求增程器控制器上报即可。在增程器系统的内部,由增程器控制器来发送请求报文以获得发动机运行时间信号。
7 结束语
本文主要就串联式和并联式混合动力电动汽车电气系统的设计来展开说明,并详细介绍CAN通信设计。混合动力电动汽车的整车控制是今后深入学习的一个方向,希望对有需要的人能有一定的帮助。
[1] 崔胜民.新能源汽车技术[M].北京:北京大学出版社,2009.
[2] SAE J1939-71,Vehicle Application Layer[S].
[3] SAE J1939-21,Data Link Layer[S].
(编辑 凌 波)
Hybrid Electric Vehicle CAN Communication Design
TANG Jian,HU Yan-feng
(Shanxi Heavy-duty Automobile Co.,Ltd.,Xi’an 710200,China)
This article describes basic concepts,classification,topology and CAN communication design of hybrid electric vehicles.
hybrid electric vehicle;concept;classification;topology;CAN communication design
U469.72
A
1003-8639(2017)10-0004-05
2016-12-12
唐键(1985-),男,工程师,主要从事汽车电器设计和汽车总线系统设计工作;胡艳峰(1986-),女,工程师,主要从事汽车总线系统设计及测试工作。
