无人船在水下地形测量中的应用与探讨
2017-11-04付明亮
付明亮


摘要:以往进行的水下地形测量使用人工操作,存在诸多困难。本文拟以无人船在水下地形测量中的应用为研究主题,基于使用GPS技术的无人船开展水下测量试验。本文首先对当前的无人船测量系统进行概述,并介绍其工作原理。之后依靠试验数据,对无人船水下测量情况进行分析。从结果来看,无人船在水下测量工作中,具有着极好的前景,可以有效避免测量时的安全威胁,提升测量的效率和准确度。
关键词:无人船;水下地形测量;试验
前言:根据调查区域的类型,水下测量一般分为海洋和内陆水域两种,就这两种类型而言,较陆地测量,其难度都是无法比拟的。具体来说,首先水下测量的对象具有不可见性,其次是测量时,水面很难保持平稳、船只很难保持位置固定一一易晃动移位,再者载人船有很多危险,浅滩、近岸无法到达或者不易到达。这些因素的存在,导致水下测量的误差和困难有时候会很大。就测量方法来说,水下测量通常是让船只停留水面,测量水下的地貌地形等情况,有时当水体不稳定时,还需要采取涉水测量的方法,但在测量时的风险及人员配置都是较大的,对人员安全和财产安全造成了一定威胁。
基于上述考虑,无人船进行的水下测量,可以有效解决测量中的危险问题,降低人工成本。并且,无人船搭载大量的高新技术和工具,在测量准度及工作效率上都得到了很大的提升。
2无人船水下测量系统的构成
2.1系统组成及其功能
就目前所见的无人船水下测量系统的构成来说,其大致分为以下几个部分:无人船平台,自动导航装置,声纳装置,GPS,外围传感器,岸基控制中心等。其工作的主要原理是通过声纳和GPS的双重测量,继而以确定水下地形地貌的坐标和高度。此外,该测量系统还具有以下特点:
(1)独立导航功能
在无人船中装备有智能芯片,通过芯片工作人员可实时获取无人船的GPS路线,并将之与预先设定的航线坐标对比,这样可以实时地进行航线的调整。
(2)智能避障功能
无人船的船头部分安装有摄像机和距离传感器,当无人船在航行中,工作人员可以实时监控无人船的航行情况,一旦遭遇障碍物时,传感器可做到迅速传递距离信息给智能芯片中,这时无人船会根据预设的安全距离数值,果断采取避让或停止的动作。这一过程的完成,很少有人为参与的加入,在很大程度上提升了无人船测量工作的效率和安全性。
(3)实时通讯功能
无人船系统还安装有数据传输设备和实时地图传设备,依托这两种设备无人船可进行与岸上操控中心数据的实时对接。测量数据支持的传输范围在10公里内,船上的相机和数据采集设备可以实时将数据传到工作站,同时工作站根据测量需求给无人船传达动作指令,继而实时调整船舶航行轨迹。
(4)具有平稳,持久的航行能力
无人测量船在硬件上也相应做出了一些改进和调整,具体来说,如将传统船只单体设计变为三体设计,做到船只重心的降低,这样能够显著改善其抗风浪的能力,使船在行驶中更加顺畅。此外,为了提升船的续航能力,在船上使用了高容量的锂聚合物电池,从而大大增加了电源容量,一次出行可连续工作5小时或以上,有效地提升了工作效率。
2.2无人船系统的测量原理
无人船系统装备有GPS、声纳这两种主要的测量仪器。在开展水下测量时,其工作原理如下:
首先船只发出声波,声波从水底传到船上时,声纳获取水下O1点的深度h1,此时船上的GPS设备开始测量船在水面O2点的平面坐标x、Y和高程值H(这时O1、O2、O2和O4在同一竖直轴线上)。在获得上面的数据后,水底O1点的高程数据H1可以通过式(1)计算获得,具体详见下图。
式(1)中的h2和h3是已知的参数。而O1和O4的平面坐标也是相同的,分别为为x和Y,通过上述的计算,我们可以获取水底O1点的三维坐标。
需要注意的是,船只在工作中很容易受到风浪的干扰,导致测量系统存在一定的误差值,该误差是由于船体在测量时的轻微摇动造成的。尽管测量船设备具有一定的误差纠正功能,但是应用的范围也仅限于较小的误差,如果风浪较大时,测量误差将无法避免,所以工作人员在测量前要密切关注测量水体的天气等情况。
3水下测量试验
3.1实验过程
本次无人船测量试验采用了云洲智能生产的ME70无人船,该无人船采用RF无线射频点对点双向通信,距离为5km,在充满电后可以持续工作约10小时,其测深精度为2cm±0.1%h(h代表水深),定位精度(RTK)为水平±8mm+lppmRMS、垂直±15mm+1ppm RMS,试验采样的地点为一处3500平方米的水库,水库附近的地形较为开阔。在进行试验的当天,水面较为平稳,没有风浪,所以对测量精度的干扰可以忽略不计。
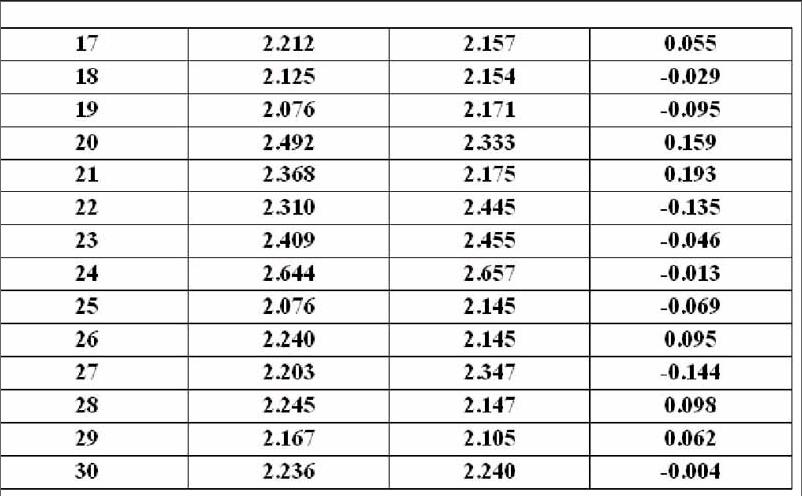
在试验中,工作人员分别进行了手动遥控和自动航行两种方式的测量,无人船總共的测量时间约40分钟,总共的采集数据约1000个,我们从这些数据中随机抽取了30个进行比对研究,之后在水库排水后,进行了该30个数据的人工测量。具体的试验样本如下,其中G1为无人机测量高程,G2为人工测量高程,△G表示二者的差值:
通过比较这些数据发现,△G数值大于零的有14个,小于零的有16个,呈现出正态分布的特点。而G1和G2的平均差为0.018m,这个数据是很小的,基本可以忽略不计,这说明无人船测量的数据较人工测量来说其差值符合误差范围,表明无人船的测量是较为可靠的。
3.2注意问题
经过本次的试验,我们也发现无人船在测量中存在着一些问题:
(1)本次试验选取的水域面积不大,导致无人船的自动巡航效果受到了减缩,我们认为,无人船自动巡航功能的能力不只如此,如果在较大的水域机械能测量时,自动巡航能力将会得到更为充分地展现。
(2)无人船系统使用的声纳穿透能力不佳,一旦声波遇到水体中较大的悬浮物时,将会对声波传播造成阻碍,因此获取的数据也难以反应水底的真实情况。结语:总之,通过上文的考察、试验和分析,我们认为,无人船在水下地形测量工作中作用显著突出,其依托高科技设备和手段,能够实现自动化地水下地形地貌测量,且测量数据有效,工作时间短,安全稳定、高效,给当前的水体测量提供了很大的帮助。endprint
