多功能履带式静力压桩机的研发
2017-11-01关丽杰武敏敏赵伟民郜云波
关丽杰, 武敏敏, 赵伟民, 郜云波
(1. 东北石油大学 机械科学与工程学院, 黑龙江 大庆 163318;2. 东北林业大学 机电工程学院, 黑龙江 哈尔滨 150040)
多功能履带式静力压桩机的研发
关丽杰1, 武敏敏1, 赵伟民1, 郜云波2
(1. 东北石油大学 机械科学与工程学院, 黑龙江 大庆 163318;2. 东北林业大学 机电工程学院, 黑龙江 哈尔滨 150040)
为了解决目前市面上常用静力压桩机不方便转场和转位的问题,将履带底盘与附着式静力压桩机相结合,提出了多功能履带式静力压桩机的设计方案.介绍了该压桩机的主要结构和创新点,并对夹持压桩机构和履带底盘的设计原理与功能特点进行了具体分析.同时以上海市土层条件为例计算了压桩过程中的最大压桩阻力,并以此为依据对夹持压桩机构进行了有限元分析,分析结果符合要求,应力分布结果也为夹持压桩机构的改进设计提供了依据.
静力压桩机; 履带式; 夹持压桩机构; 有限元分析
随着现代建筑科学技术和施工机械的不断发展,目前已形成4种常用的桩基础施工方式:锤击打入法和振动沉入法、静力压入法和钻孔灌注法.除钻孔灌注法是以灌注桩为工作对象外,其余3种都是以预制桩为工作对象.预制桩施工可以避免灌注过程中的断桩、缩颈、露筋和夹泥等现象,桩身质量容易保证,因此使用较为广泛.预制桩施工时,锤击打入法和振动沉入法会在一定程度上破坏地基,并伴生振动、冲击、噪音等环境公害等问题,随着环境保护要求的提高,在一些城市这两种方法已经被禁止使用[1].而静力压桩法是采用静载荷将预制桩安静且平稳地压入土中的一种基础施工方法,可有效地弥补其余两种预制桩施工方法的不足,越来越受到现代社会的认可.目前,国内研发和使用较多的是步履式静力压桩机,研究方向也从粗放式向精细化发展.西方国家由于人口密度较小及地质环境等原因,对静力压桩机的使用较少,虽然近年来也有一些静压桩施工案例,但并未像我国一样形成静压桩施工工法,能够代表国外静力压桩机发展水平的是日本研发的附着式静力压桩机.附着式静力压桩机需要配置起重机、动力车等配套设施,而步履式静力压桩机需要很多配重,机身沉重,也只能满足一般工况的压桩工作,不能进行围堰、水上等特殊工况的施工.所以这两种静力压桩机转场和转位都不方便,施工效率受到严重影响.为了适应新形势发展,解决以上压桩机存在的问题,本文研究将附着式压桩机与步履式压桩机进行结合,并首次使用履带底盘作为静力压桩机的行走机构,设计了多功能履带式静力压桩机.
1 多功能履带式静力压桩机主要结构
多功能履带式静力压桩机主要由5部分组成:夹持压桩机构、起重机构、驾驶室及其升降机构、履带底盘和动力系统,如图1所示.

图1 多功能履带式静力压桩机Fig.1 New multifunctional crawler mounted silent piler
1.1夹持压桩机构
夹持压桩机构由放置在履带底盘上的支座或是已经打入地下的几根桩支撑.压桩机站在支撑上面,由起重机构为压桩机吊入新桩,压桩机的夹桩头夹紧新桩并压桩.在完成一个压桩行程后,松开夹桩头,将其提升至上位,然后再次夹紧桩,进行下一行程的压桩工作[2].若是在平地上工作,可以在把预制桩压到预定深度后,使履带底盘前进一个桩位,开始进行下一个桩的压拔工作;若是在履带底盘无法行驶的环境工作,如水上、倾斜的路堤或狭窄受限制的地方等,可以在压入半根桩时,夹桩头夹紧,松开脚爪,机身抬高离开支座或桩身,压桩机床身间的液压缸把床身向前拉一个桩位距离,再降低床身,夹紧脚爪,把剩余的半根桩压入土壤,之后松开夹桩头,把夹桩头提升至上位,等待起重机构的下一次吊桩.
参考附着式静力压桩机,再根据履带底盘特点对该机构做出适当调整,使压桩机结构更加紧凑.但由于履带式静力压桩机可以脱离底盘工作,所以能够适应水上等特殊工况,相比步履式静力压桩机,其能够实现更多的功能.
多功能履带式静力压桩机不但可以压拔预制桩,对H型钢桩和其他异型钢桩也适用.对于不同形状的桩,只需要更换履带底盘上的支座和压桩机构即可.不同桩型对应支座及压桩机构示例如图2所示.多功能履带式静力压桩机还可以根据土层条件的不同,配合螺旋钻等机构进行中掘法以及钻孔法施工[3].

(a) 钢管桩对应支座
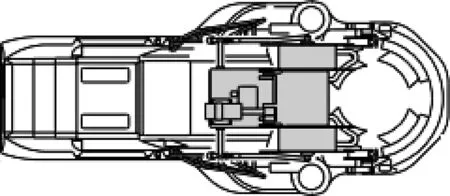
(b) 钢管桩对应压桩机构

(c) U型钢板桩对应支座
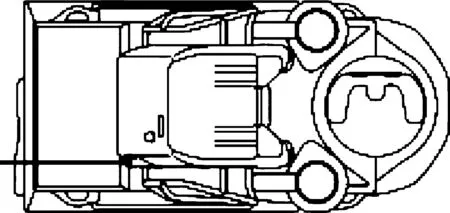
(d) U型钢板桩对应压桩机构
1.2驾驶室及其升降机构
驾驶室升降是通过一个平行四连杆机构来实现的,该机构利用平行四边形在变形过程中两组对边始终分别保持平行的原理,使得无论驾驶室如何升降,始终保持水平状态[4].相对于市面上现有步履式静力压桩机的固定驾驶室,这一改进可使工作人员清楚地观察压桩情况,正确地进行操作.驾驶室及其升降机构也坐落在与压桩机构连接的平台上,以保证其跟随压桩机构工作.
1.3履带底盘
履带底盘是该压桩机的行走装置,与步履式底盘相比,其结构轻便,运行灵活,爬坡能力强,能够较快速地在复杂工地情况下安全行驶.履带式压桩机转场时也不需像步履式压桩机一样将配重等结构全部拆下分别运输,所以很大程度上提高了压桩机的转场便捷性.
履带底盘除可作为行走装置外,还具有支承作用,在其上添加平台后,可将起重机构、驾驶室和动力系统连接在平台上,保证其行动统一性.履带式压桩机与附着式压桩机相比较,前者结构更加紧凑,转位更加灵活.
为了适应更多工况,参考履带底盘的扩履方式和步履式底盘的横向平移方式,对履带底盘进行改造,使履带底盘除了可以前进和后退外,还可以通过6个支腿的相互配合实现横向移动功能,以解决围堰桩施工的难题.改造后的履带底盘横向平移过程原理如图3所示.

图3 履带底盘横向平移过程原理图Fig.3 Schematic diagram of transverse translation process of crawler chassis
由图3可知:当履带底盘开始横向向右平移时,左边两个支腿和中间两个支腿伸出,履带离地,支架右梁伸长,履带右移;接着支腿全部收回,支架左梁伸长;然后右边两个支腿和中间两个支腿伸出,履带左移,支架前后左梁收缩;最后,将支腿全部收回,实现了履带底盘的向右平移.
1.4起重机构及动力系统
起重机构的作用是吊起桩,并对压桩机构进行喂桩.起重机构通过一个回转支承连接在一个平台上,这个平台与压桩机构连接.回转支承使得起重机构能在水平平面内进行回转和自由作业,其坐落在与压桩机构连接的平台上,使起重机构能够跟随压桩机构脱离履带底盘,并在水上、倾斜的路堤或狭窄受限制的地方进行工作.作为一部分配重的动力系统和起重机构分别放置在平台前后两端,保证了整机的稳定性.
2 多功能履带式静力压桩机主要性能参数确定
静力压入法通常应用于高压缩性黏土层或砂性较轻的软黏土地基,在土质松软的南方地区较多使用该方法.因此,以上海地区为例对压桩力进行初步估算,上海地区各土层压桩阻力值如表1所示.
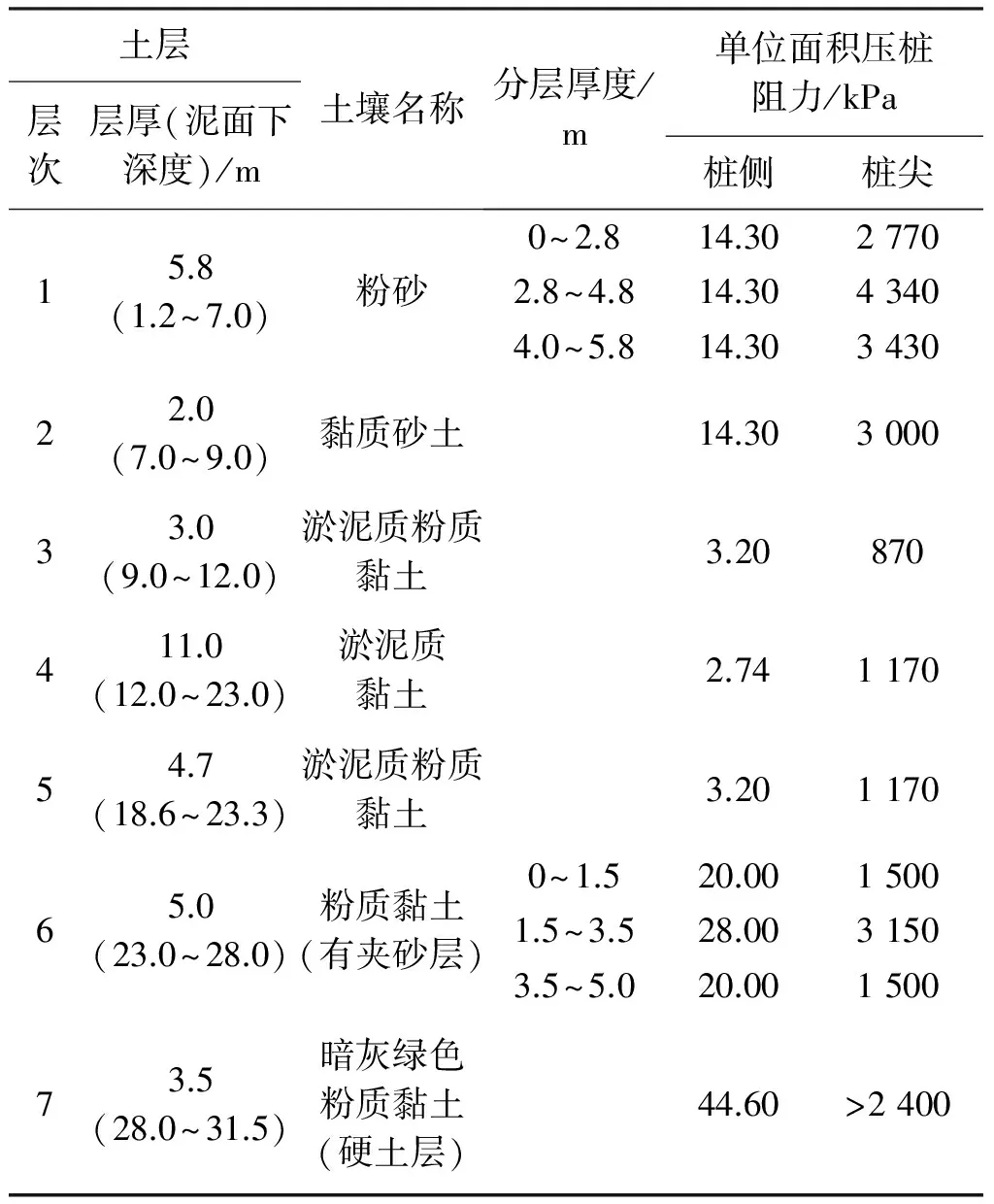
表1 上海地区各土层压桩阻力值一览表Table 1 The resistance value of piling of solis in Shanghai
压桩过程中,桩要克服包括惯性力在内的土阻力及其他阻力,而土阻力又包括桩侧摩擦阻力和桩尖阻力.压桩阻力可通过式(1)进行估算.
F=C∑hifi+qtS
(1)
式中:F为压桩阻力(kN);C为桩截面周长(m);hi为i层土层高度(m);fi为i层单位面积桩侧摩擦阻力(kPa);qt为t层单位面积桩端阻力(kPa);S为桩尖截面积(m2).
假设将截面尺寸为350 mm×350 mm的方桩压入到第7层,由式(1)可知,当桩被压至最下端时,所受到的压桩阻力最大,将表1中数据代入后得出最大压桩阻力为907.79 kN.为了使该压桩机适应更多土质条件,取压桩力为1 500 kN.
克服压桩阻力的动力源是压桩力,但它不是直接作用于桩,而是通过夹桩头与桩之间的摩擦力来实现的,摩擦力由夹桩力产生,两者之间关系如式(2)所示.
Ff=μFj
(2)
式中:Ff为夹桩头与桩之间的摩擦力;Fj为夹桩力;μ为摩擦因数,一般取0.35.
由于摩擦力等于压桩力1 500 kN,代入式(2)可得夹桩力为4 285.71 kN,取整为4 300 kN.
通过查阅相关工程实例,设定压桩速度、压桩行程、横向平移行程等参数.多功能履带式静力压桩机主要性能参数如表2所示.

表2 多功能履带式静力压桩机主要性能参数
3 夹持压桩机构的有限元分析
本文选取方桩为施工对象,设计夹持压桩机构如图4所示,其主要结构包括旋转台、底座、压桩滑块和夹桩钳4部分.底座通过脚爪固定在履带底盘或者已经压入的方桩上,为压桩工作提供反力;旋转台可以在底座上转动,以实现拐角处施工;两个压桩油缸通过压桩滑块来提供压拔桩力;夹桩钳夹紧方桩,在保证夹紧力不会对桩造成破坏的条件下将桩向下压.下面对夹持压桩机构进行有限元分析.
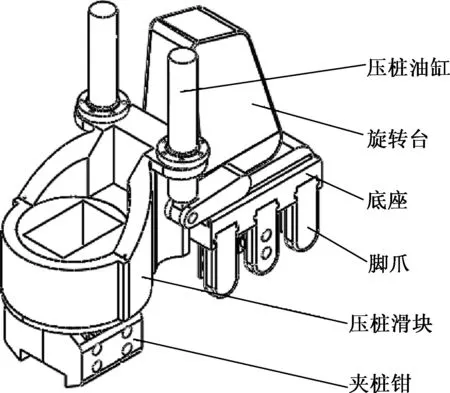
图4 方桩夹持压桩机构示意图Fig.4 Clamping and pressing mechanism of square pile
夹持压桩机构是压桩执行机构,其设计好坏直接关系到该静力压桩机能否成功完成压拔桩工作,所以着重对其进行分析.综合考虑现场需要及生产成本,夹持压桩机构中除销轴类零件材料为45钢外,其余零件材料均选低等结构钢Q345b[5].
采用三维建模软件对夹持压桩机构进行有限元分析.把脚爪与履带式底盘的接触面和夹桩头与桩的接触面设定为固定面,在液压缸连接处加1 500 kN压桩力.夹持压桩机构的有限元网格模型如图5所示.

图5 夹持压桩机构有限元网格模型Fig.5 The finite element mesh model of clamping and pressing mechanism
在压桩状态下,夹持压桩机构有限元仿真结果如图6和7所示.

图6 夹持压桩机构应力云图Fig.6 The stress nephogram of clamping and pressing mechanism
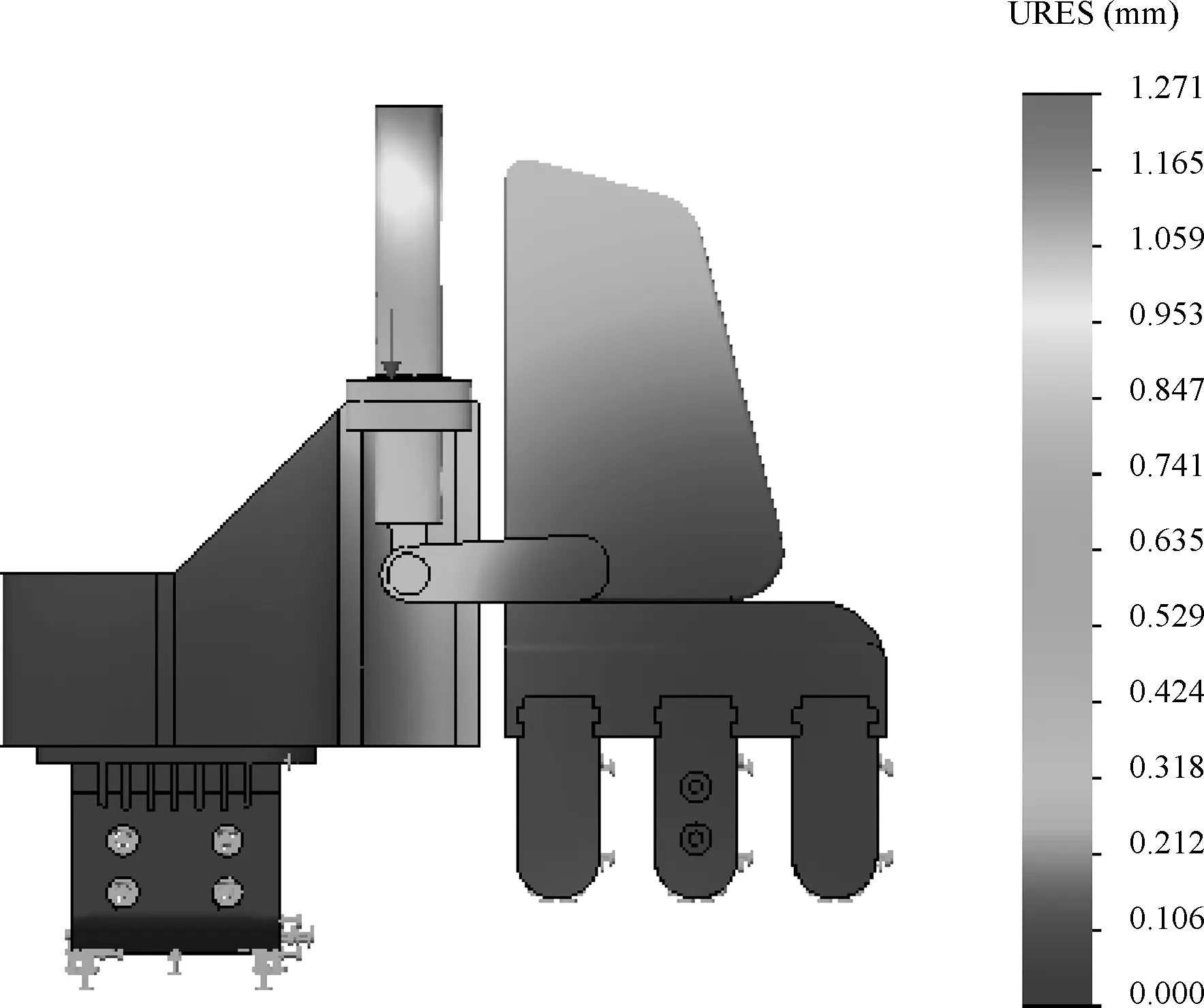
图7 夹持压桩机构位移云图Fig.7 The displacement nephogram of clamping and pressing mechanism
由图6和7可知,夹持压桩机构夹紧桩在向下压的过程中最大应力为190.936 MPa,小于材料许用应力345 MPa,最大位移为1.271 mm,也处于允许范围内,所以该夹持压桩机构的设计满足实际要求.
4 结 论
(1) 本文设计的多功能履带式静力压桩机,不仅综合了步履式静力压桩机和附着式静力压桩机的优点,而且解决了压桩机转场和转位不便的问题,有效提高了工作效率,拥有更加广阔的发展前景.
(2) 多功能履带式静力压桩机可利用配置的起重机和附着式桩架,满足定位桩的施工,也可满足中掘桩等多种桩基施工作业的需求.
[1] YAMASHITA H, HIRATA H, KINOSHITA M. Challenges in the past and for the future of design and installation technologies on steel pipe piles in Japan[J]. Doboku Gakkai Ronbunshuu F, 2010,66(3):34-36.
[2] 周卫兵.基于桩反作用力的环保型可行走多功能静力压桩机[D].广州:广东工业大学机电工程学院,2011.
[3] 刘振东,赵文欣,赵伟民.桩架的起架油缸铰座的分析计算[J].科学技术与工程,2012,12(12):2942-2946.
[4] GUO F, ZHAO W M, LI G X. Analysis of telescopic beam structure using couple of DOF technique and its application[J]. Journal of Harbin Institute of Technology (English Edition), 2009,16(2):469-473.
[5] SFILIGOJ E. Pile drivers[J]. Croplife, 2010,173(6):86-89.
(责任编辑:徐惠华)
DesignandResearchofMultifunctionalCrawlerMountedSilentPiler
GUANLijie1,WUMinmin1,ZHAOWeimin1,GAOYunbo2
(1. College of Mechanical Science and Engineering, Northeast Petroleum University, Daqing 163318, China;2. College of Mechanical and Electrical Engineering, Northeast Forestry University, Harbin 150040, China)
In order to solve the problem that the common silent piler is inconvenient to fields or position, the design plan of multifunctional crawler mounted silent piler is put forward by combination of crawler chassis and adhesion type pile driver. The main structures and their innovation are introduced and the design principle and function characteristics are analyzed concretely. Meanwhile, the maximum pressure resistance is calculated by taking the the soil conditions in Shanghai as an example. Finally, the finite element analysis of the clamping and pressing mechanism is made. The analysis results meet the requirements and the result of stress distribution can be the basis of the improvement of the clamping and pressing mechanism.
silent piler; crawler; clamping and pressing mechanism; finite element analysis
TU 753.3
A
1671-0444 (2017)04-0547-05
2017-04-05
黑龙江省教育厅科学技术研究资助项目(12541101)
关丽杰( 1964—) ,女,黑龙江宁安人,教授,硕士,研究方向为计算机辅助设计及工程图学.E-mail:gljws@163.com
