电磁驱动磁悬浮式片梭引纬模式的建立与实验
2017-09-25吴晓光雷小龙孔令学
吴晓光, 袁 博, 雷小龙, 张 驰, 孔令学
(1. 武汉纺织大学 机械工程与自动化学院, 湖北 武汉 430073; 2. 迪肯大学 国家创新重点实验室, 澳大利亚 吉朗 3217)
电磁驱动磁悬浮式片梭引纬模式的建立与实验
吴晓光1, 袁 博1, 雷小龙1, 张 驰1, 孔令学2
(1. 武汉纺织大学 机械工程与自动化学院, 湖北 武汉 430073; 2. 迪肯大学 国家创新重点实验室, 澳大利亚 吉朗 3217)
针对片梭织机在采用扭轴式投梭方式时存在的冲击大、效率低、能耗高等问题,提出一种多级式电磁投梭原理。根据电磁投射理论,建立了电磁投梭引纬的基本方案及片梭的投射/制动模型。通过理论模型、实验验证及仿真分析,得出多级电磁投梭的效率优于机械式投梭的结论;为使片梭在高速引纬时保持运动稳定性,提出了片梭磁悬浮筘座阵列系统。建立了电磁投梭与悬浮筘座的理论模型,分析了片梭的速度、加速度及其电磁场耦合特性。同时进行了电磁驱动加速试验、ANSYS有限元分析,验证了电磁驱动投梭引纬的可行性,实现以电代机“零传动”片梭引纬模式。
电磁投梭; 引纬; 磁悬浮筘座阵列; 片梭织机
片梭织机是一种用于高端织物的纺织机械,可适用纱线范围广,可织造复杂的提花织物、服饰和工业用宽幅织物。迄今为止,国内外片梭织机的关键技术——片梭投梭原理主要是由机械式扭轴投梭机构实现(瑞士Sulzer公司)[1]。它利用机械机构储能,通过扭轴将梭体高速投射,以满足片梭织机的编织工艺要求。由于机构原理的限制,扭轴投梭机构运动时冲击力大,噪声大,摩擦能耗高,因此,扭轴式投梭机构机速及投梭效率低。由文献[2]可知,其最大机械效率仅为18.3%。由此可见,若要在现有投梭机构上进一步提升投梭效率,则必然会受到机构原理及材料性能上的限制。
电磁投射的最大特点在于利用电磁力瞬间将物体加速投射(如:澳大利亚国立大学以轨道炮的方式将质量为3.3 g的弹丸以5.9 km/s的速度投射[3];美国Sandia Lab以电线圈加速的方式将18 kg的弹丸加速至420 m/s[4]),且具备在加速过程中弹丸的加速度可控、无机械传动、噪声小、投射效率高等特点,因此,本文提出一种将电磁投射与磁悬浮原理相结合的引纬模式。该模式基于电磁投射的基本原理,通过电磁线圈将片梭高速投射,并在片梭经过筘座磁悬浮阵列系统时将梭体悬浮,实现引纬过程。通过以电代机的“零传动”模式,取代机械式投梭引纬,提出一种新的织机引纬编织理论及方法。
1 电磁驱动投梭/制梭原理与结构
1.1电磁驱动投梭基本模式
现有的片梭织机是利用梭体作为引纬器,由若干片梭依次从供纬侧将纬纱引入梭口。图1(a)所示结构为片梭织机的扭轴式投梭机构,投梭动力来自扭轴加扭时储存的弹性位能,投梭棒释放后摆回,将片梭击出。片梭完成一次引纬过程后,通过油压缓冲器对片梭进行制动,完成编织动作循环[5]。在片梭击出后,一系列筘座将片梭约束在前进方向上。上下层纱线呈一定角度交错布置,筘座布置在上下层纱线中间,如图1(b)所示。
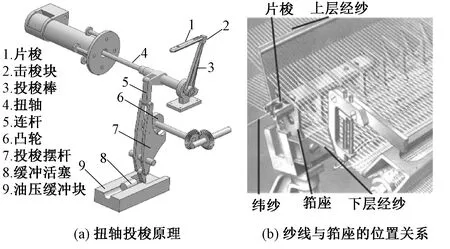
图1 现有的片梭织机原理与纱线布置Fig.1 Present projectile loom and yarn arrangement.(a) Torsion bar weft insertion principle; (b) Position relation between yarn and sley
本文拟采用多级电磁驱动的磁悬浮式片梭双向引纬方案,如图2所示。图中多级电磁驱动线圈分级提供瞬时电磁推力,满足片梭在投梭过程中的加速要求,以及制动过程中的减速要求。由于投射后的引纬距离较长,片梭在引纬过程中会受到重力等外界因素的影响,使片梭偏离预定的运动轨迹,影响到另一端的接梭、制动片梭的过程,因此,需要磁悬浮筘座阵列以无摩擦的方式使片梭的运动轨迹稳定在如图2所示的轴向中心处,其波动量通过反馈控制系统控制在误差范围内。
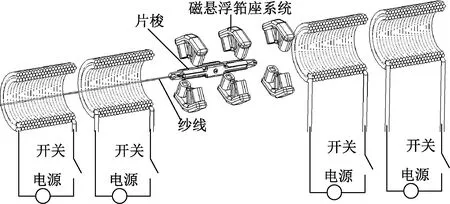
图2 电磁驱动磁悬浮式投梭原理图Fig.2 Principle of electromagnetic drive magnetic suspension projectile
根据上述电磁驱动与悬浮片梭引纬原理的结构关系,当纱线被送入片梭后,片梭经由多级电磁线圈组同步加速发射,在通过多级磁悬浮筘座阵列时,筘座与片梭相互的电磁力使片梭保持平衡,以高速状态通过筘座系统,实现无摩擦方式投梭及引纬;当片梭到达制动位置时,系统以减速模式完成片梭制动,并剪断纱线,完成一次电磁驱动悬浮式引纬过程。下一引纬过程中,投梭线圈组与制动线圈组在功能上互换,实现双向引纬。经纱的排布与普通片梭织机中经纱的排布方式有所区别,上下层经纱之间呈一定夹角交错排布在磁悬浮筘座内部,如图3所示。当引纬过程结束后,在打纬过程中,纬纱从筘座的右侧开口脱出,筘座则保持静止,通过独立的、打纬片阵列移动、前摆代替普通片梭织机中的筘座前摆。打纬片采用非磁性金属或非金属材料制作,避免干扰到片梭或筘座的磁场。
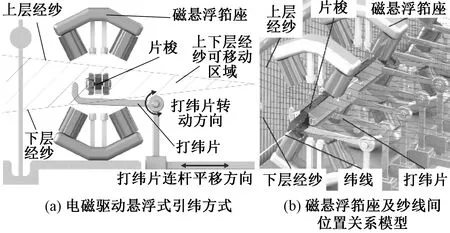
图3 电磁驱动悬浮式引纬方式与磁悬浮筘座及纱线间位置关系模型Fig.3 Electromagnetic drive suspension weft insertion method (a) and position relation model between magnetic suspension sley and yarn (b)
由以上电磁驱动悬浮式引纬模式可见,与机械式扭轴储能驱动投/制系统相比,其结构简单,投制效率高,且可以去除扭轴式投/制时复杂的机械传动机构。
1.2电磁驱动投梭原理
本文采用电磁驱动的磁阻式投梭原理[6],片梭在线圈内部的位置与电磁力方向之间的关系如图4所示。片梭材料选用铁磁性材料,铁磁性材料受电磁力方向与正向磁场梯度方向相同,当片梭处于线圈左侧时(投梭起始位置),电磁力正向做功,片梭向右投射;反之,电磁力反向做功,对片梭进行减速,实现片梭的制动。
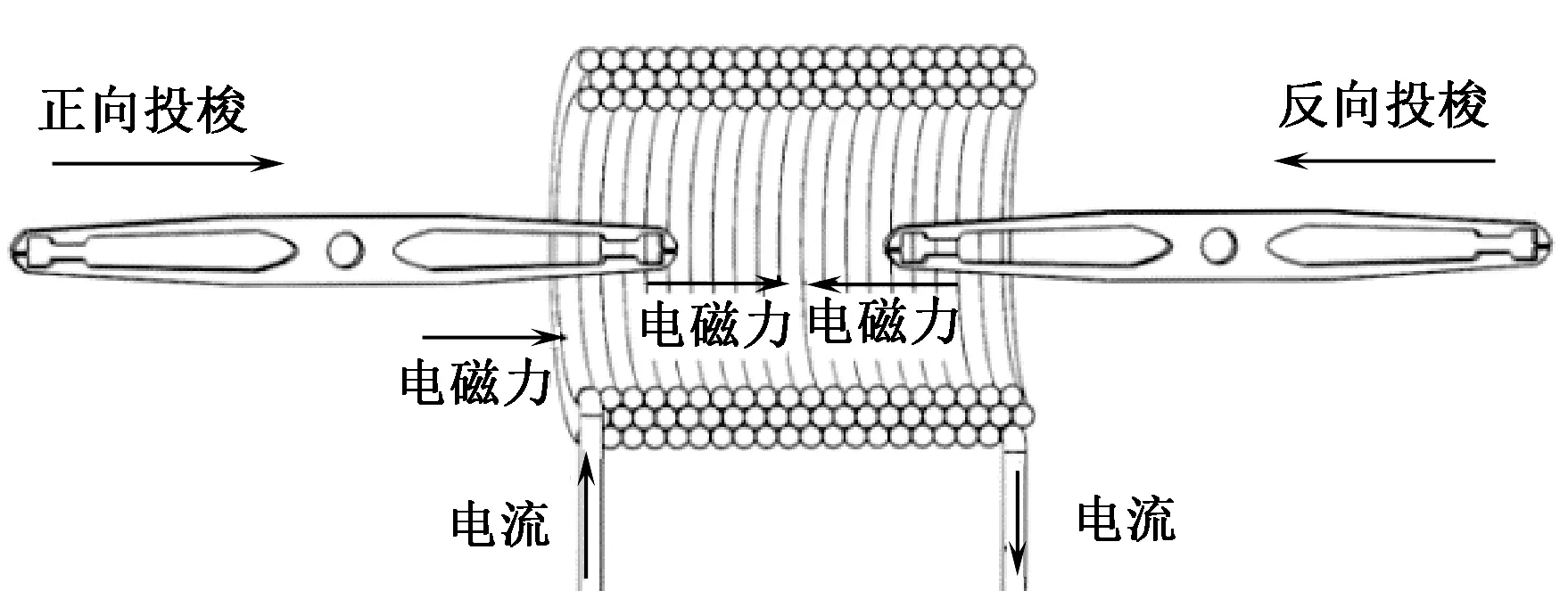
图4 电磁驱动原理Fig.4 Electromagnetic driving principle
由电磁学理论[7]可知,当通电瞬间,线圈内产生的磁通密度B沿轴向的分量为

(1)
式中:n为单位长度内的匝数,n=N/L,N为线圈的总匝数,L为线圈的长度,m;I为线圈电流,A;μ0为空气的磁导率;β1和β2为线圈内部轴线上片梭所在位置与线圈两端构成的夹角。
式(1)中线圈每匝的磁通量Φ为
(2)
式中:R为线圈的半径,m;S为线圈内部横截面积,m2。在线圈内部,总磁通匝链数Ψ为
(3)
通电线圈产生的磁动势为
Fm=Ni=ΦRm
(4)
式中,Rm为磁阻,H。Rm=lm/μA,μ为片梭材料的磁导率;lm为片梭磁路长度,m;A为片梭磁路横截面积,m2。对于线圈,磁通量Φ是常量,Φ与Ni的关系式是线性的,则线圈中储存的磁能Wm为

(5)
由式(5)可知,磁场储存的磁能Wm是关于磁通Φ和磁阻Rm的函数,即Wm=fΦ,Rm。根据虚功原理可推导出片梭在线圈中受力的表达式,即对式(1)沿运动轴线的x方向进行微分,即可获得驱动线圈对片梭产生的推力:

(6)
式中,dΦ/dx为磁通量随位移的变化率。
同时,对于处在磁场中的片梭,其内部的磁感应强度为
B=μH-μ0μrH
(7)
式中:μr为片梭材料的磁导率;μ为相对磁导率;H为线圈内部的磁场强度,B。
根据式(7)可知,片梭内部的磁感应强度与材料的磁导率有关,又根据式(2)、(6)可知,材料的磁导率与材料在磁场中的磁感应强度成正比,而材料的磁感应强度和片梭受到的推力成正相关,因此,提高材料的导磁率,可以显著增大片梭所受推力,提高片梭投射过程的效率,提高发射初速度。通过分析,初步将片梭材料选择为具有较高磁导率、饱和磁通密度的1008低碳钢。
2 磁悬浮片梭引纬原理与结构
由于多级电磁式投梭比机械式扭轴投梭机构的投梭速度(小于35 m/s[8])大,因此,需要设计新的筘座,以减小片梭与筘座间的摩擦力。磁悬浮筘座是由电磁-永磁结构混合组成的电磁悬浮装置。当片梭被投射进入筘座阵列系统后,梭体在磁场力的作用下克服重力,在筘座内部的中心位置保持悬浮状态[9]。通过梭体与筘座之间的非接触式的引纬关系,实现梭体与筘座间运动无摩擦。据此,片梭通过多级磁悬浮筘座系统而实现高速、稳定的引纬工作模式,实现“零传动”引纬。
2.1磁悬浮筘座及片梭基本结构
磁悬浮筘座系统的结构如图5所示。由图可知,多级磁悬浮筘座阵列系统由多个筘座与线性霍尔感应器组成,其中每对筘座与梭体间均由电磁-永磁结构对应。图5还示出筘座与经纱之间的位置关系。
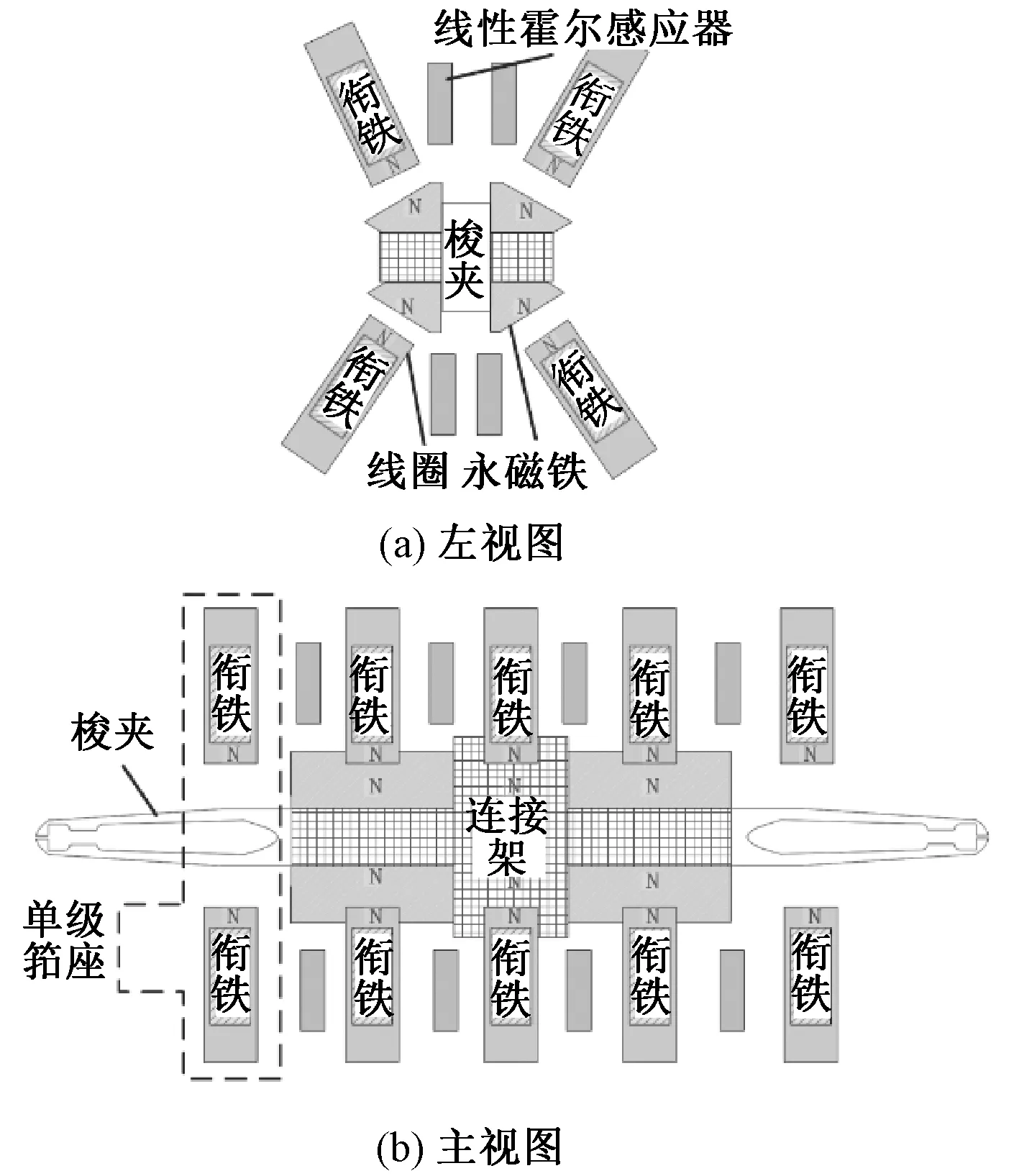
图5 磁悬浮筘座系统结构图Fig.5 Structure of magnetic suspension sley system.(a) Left view; (b) Main view
为防止梭体在高速运动过程中产生磁阻干扰片梭的移动,以及减小片梭在飞行过程中产生的偏移,磁悬浮筘座的控制系统采用线性霍尔感应器对片梭在垂直方向与水平方向上的位置进行实时监测,并以此为反馈系统的输入量,控制各个筘座线圈的通电时间及电流大小,进而调整片梭上每个永磁铁所受的电磁力,使片梭在高速磁悬浮状态通过筘座时处于所要求的运动轨迹。在考虑满足双向引纬与磁悬浮结构的要求后,片梭与筘座的结构设计如图6所示。
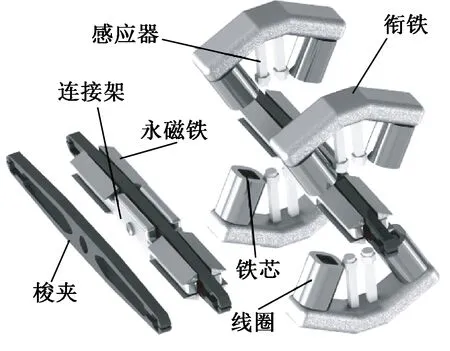
图6 梭夹、磁悬浮片梭结构及磁悬浮筘座模型Fig.6 Model of gripper, projectile shuttle and magnetic suspension sley
梭夹的结构和尺寸与传统片梭织机上使用的梭夹相似,但为前后对称的结构。片梭长度为89 mm,前后各布置了4个截面为等腰直角三角形的永磁铁,永磁铁与片梭间通过铝质连接架连接。
2.2磁悬浮筘座的基本结构
为了确定片梭在筘座中的受力情况,首先建立筘座中单块永磁铁与线圈磁极之间的作用力
(8)
式中:q1和q2分别为两磁极的磁极强度,A·m;r为两磁极间的距离;μ0为空气的导磁率。由此可推导出两磁极间的作用力Fa1、Fa2以及永磁铁对衔铁的作用力Fb。
Fa1=mg+Fa2
(9)
式中:m为片梭的质量;g为重力加速度;Fa1为下端电磁线圈磁极对下端永磁铁磁极的作用力,N;Fa2为上端电磁线圈磁极对上端永磁铁磁极的作用力,N。

(10)
式中:r1为线圈与底部永磁铁磁极间的距离;r2为线圈与顶部永磁铁磁极间的距离。
永磁体对铁芯的作用力为
Fb=HSJ
(11)
式中:H为片梭端面处永磁铁的磁场强度,B;S为片梭端面处永磁铁的面积,m2;J为铁芯被永磁铁磁化的磁化强度。


(12)
为了使片梭悬浮,需要满足以下条件:
Fa1+Fb2=mg+Fa2+Fb1
(13)
式中:Fb1为永磁铁与下端铁芯间的作用力;Fb2为永磁铁与上端铁芯间的作用力。通过上述方程,可以确定实现片梭稳定悬浮所需要的参数,据此完成片梭悬浮控制系统的设计。
3 电磁投/制仿真分析及实验
3.1仿真分析及初始参数设置
根据上述电磁投射原理,使用电磁场有限元分析软件Ansoft Maxwell对磁悬浮筘座模型进行动态电磁力及运动仿真分析[10],创建了电磁投射片梭/制动装置的仿真模型。线圈外径为31.2 mm,内径为20 mm,长度为50 mm,匝数为600。电容值为1 000 μF,发射电压为200 V,片梭质量为24.26 g,长度为 89 mm,材料为1008钢,具体结构如图6所示。并设置为当片梭中心移动至线圈中点时片梭所在级线圈断电。由于在引纬过程中纱线的实时张力会随初始张力、片梭的加速度、速度等因素改变,因此,在此仿真模型中,并未涉及到纱线张力对片梭运动的影响。
3.2片梭加速仿真及分析
从片梭多级加速仿真的结果看,其参数设置成电压为200 V,电容为1 000 μF的情况下,经过5级电磁线圈加速后,总共耗时约30 ms,片梭的速度从0升至41.77 m/s,片梭在加速过程中的最大加速度为3 714 m/s2。各级的速度变化与最大加速度如表1所示。
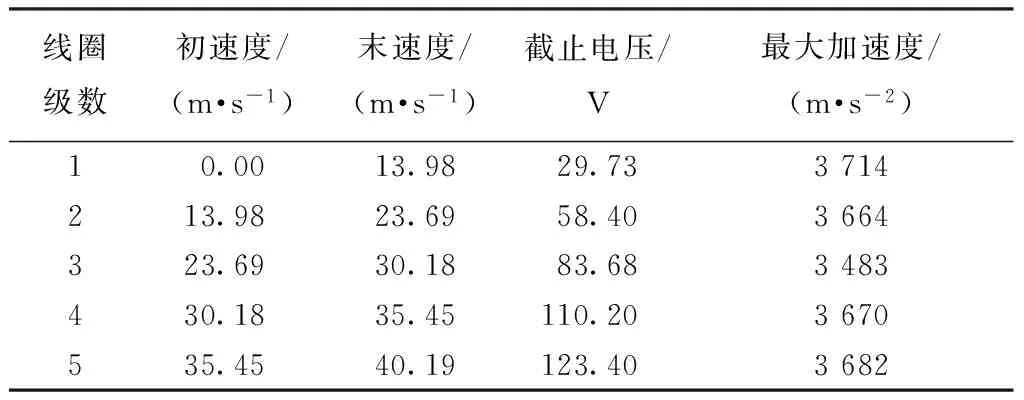
表1 多级加速过程仿真速度及最大加速度变化Tab.1 Simulation speed and maximum acceleration of multi-stage acceleration process
片梭多级减速仿真结果如表2所示,在电压为200 V的情况下,经过4级电磁线圈加速后,总共耗时约20 ms,片梭的速度从40 m/s降至0。各级的速度变化与最大加速度如表2所示。在整个加速过程中,线圈最大瞬时电流为27.8 A。
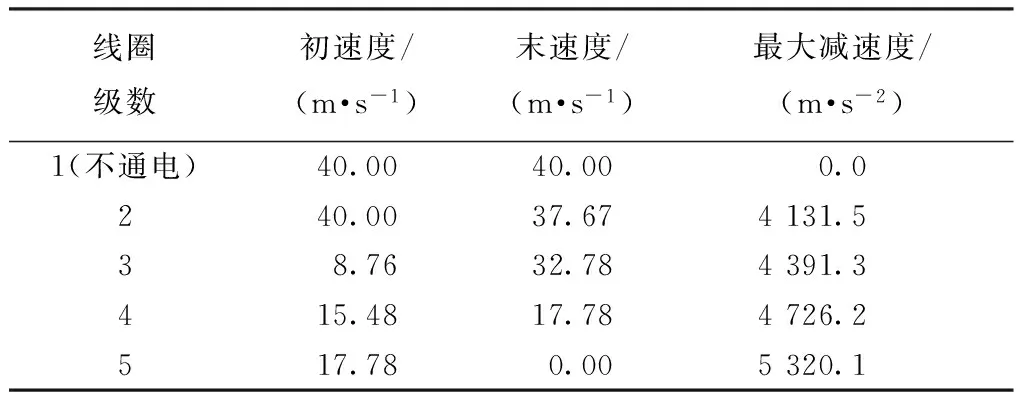
表2 多级减速过程仿真速度及最大减速度变化Tab.2 Simulation speed and maximum reduction speed changeTable of multi-stage deceleration process
根据式(14)计算得出电磁投射的效率η为27.9%。高于扭轴式投梭机构的18.3%,且通过优化线圈参数及片梭的外形,具有进一步提高效率的空间。

(14)
式中:v为片梭的速度,m/s;m为片梭的质量,kg;C为电容组的电容值,F;U为发射时电容的电压值,V。
如表1所示,电磁投射片梭的最大加速度为3.714 km/s2,远小于扭轴式投梭机构。以Sulzer PT7 100片梭织机为例,在纱线静态张力(static tension)为7.5 cN时,引纬过程中片梭的最大加速度约为18 km/s2,峰值的动态张力(dynamic tension)约为210 cN,平均动态张力约为76 cN[11],由于电磁投射片梭的最大加速度较小(3.714 km/s2,远小于18 km/s2),因此,与扭轴式投梭机构相比,在引纬过程中纱线的最大动态张力会显著降低,加载到片梭上的瞬时冲击也较小,能够使片梭具有更长的使用寿命。
3.3片梭磁场的有限元分析
由于铁磁性材料的片梭相对磁导率(μ=7 000~10 000)远大于空气(μ0=1),因此,绝大多数磁场强度H都集中在片梭周围,最大处为10.018 kA/m;磁感应强度B最大值出现在片梭表面,最大处为1.51 T,如图7所示。由于片梭外形不规则,所以片梭周围的磁场强度及内部的磁感应强度都无法通过公式推导得到一个解析解,只能通过有限元的方式进行数值计算。同时注意到,在通电线圈中的片梭,其内部部分区域磁感应强度几乎已达到片梭材料的饱和磁感应强度,因此,调整片梭的结构外形以及继续选择更适合的片梭材料将是进一步研究的重点。
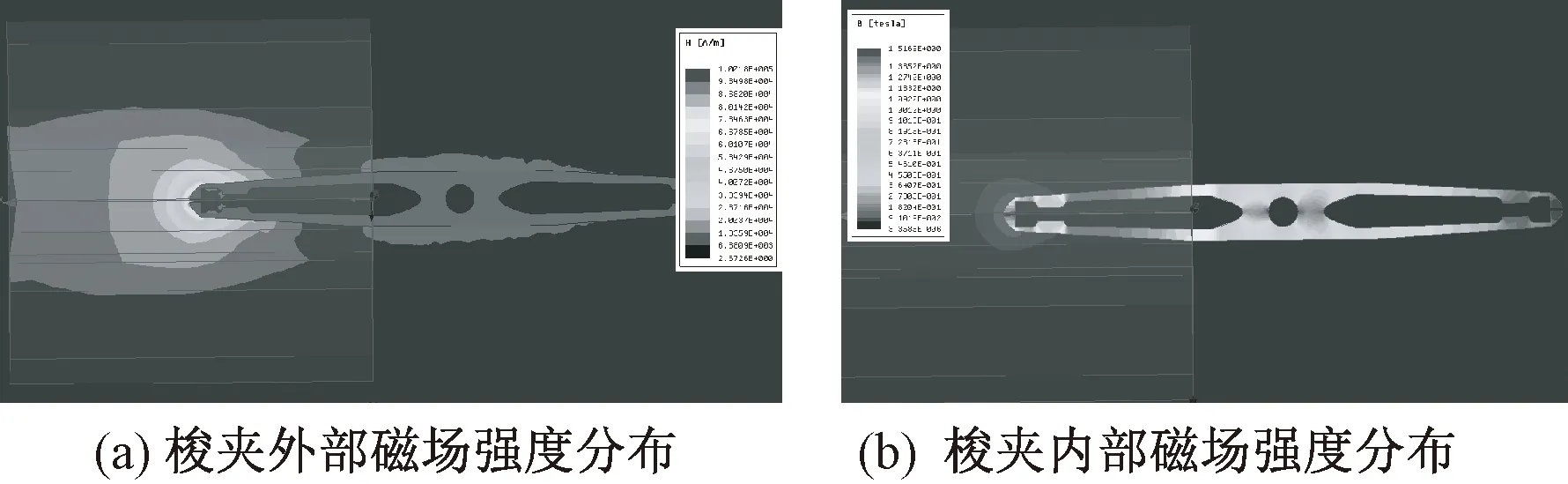
图7 梭夹在线圈内部的磁场分布Fig.7 Distribution of magnetic field. (a) External magnetic field intensity distribution; (b) Internal magnetic induction intensity distribution
3.4电磁投射系统实验
片梭电磁投射实验平台与测速系统如图8所示。测速系统是通过测出加速完成后的片梭到达2个间距固定的光电传感器的时间差,计算出片梭在这段距离内的平均速度以完成测速过程。电磁投射实验平台中各元件的参数与有限元仿真的参数相同。目前实验平台只完成了2级发射线圈的搭建,因此,以2级发射线圈进行实验,对理论模型进行验证,实验所获得的片梭出口速度结果如表3所示。
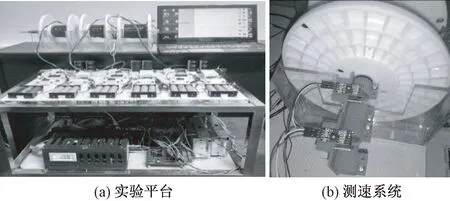
图8 电磁投射实验平台Fig.8 Electromagnetic projection experiment platform.(a) Experimental platform; (b) Speed measuring system

发射电压/V所用级数出口速度/(m·s-1)200112.4200221.7
从表3可看出,有限元仿真结果与实验结果基本一致,相差较小(仿真结果为1级速度13.98 m/s,2级速度为23.69 m/s),验证了模型的正确性。
4 磁悬浮片梭引纬原理与结构
根据单个磁悬浮筘座的原理及结构,使用电磁场有限元分析软件Ansoft Maxwell对磁悬浮筘座模型进行静态磁场力仿真分析。通过电磁有限元仿真,分析片梭在不同位置时受到筘座对片梭的最大电磁力,验证磁悬浮筘座系统的可行性。
4.1磁悬浮筘座的基本结构
磁悬浮筘座与片梭一样,都是轴对称结构。其仿真模型模型结构参数如下:磁悬浮筘座铁芯的直径为4 mm,长度为10 mm。缠绕铁芯的线圈外径为9 mm,内径为4 mm,线圈长度为12 mm,匝数为1 008匝。磁悬浮筘座中的同侧2个线圈夹角均为53.14°,2个线圈之间的距离为29.38 mm,如图9所示。永磁铁的磁感应强度为890 kA/m。
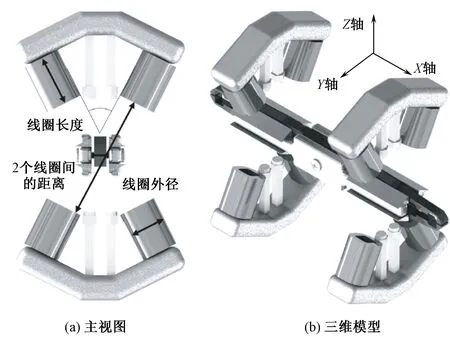
图9 磁悬浮筘座模型Fig.9 Magnetic suspension sley model. (a) Main view; (b) Three-dimentional model
4.2仿真结果与分析
由筘座尺寸可以看出,片梭在Z轴方向上偏移超过3 mm就有可能与筘座发生碰撞,因此,对片梭在初始位置处于0、-1、-2、-3 mm时分别进行静磁场力的仿真计算,得到了在不同线圈电流时片梭在Z轴方向上的受力情况,结果如表4所示。由于片梭质量约为24.26 g,可知在Z轴方向上需要约242.6 mN的力使片梭在运动过程中保持受力平衡。从表4可看出,当片梭偏移中心位置时,通电线圈能够产生足够的电磁力,使片梭在飞行过程中克服重力保持稳定,按照预定轨迹移动到电磁投梭系统的另一端,完成引纬过程。
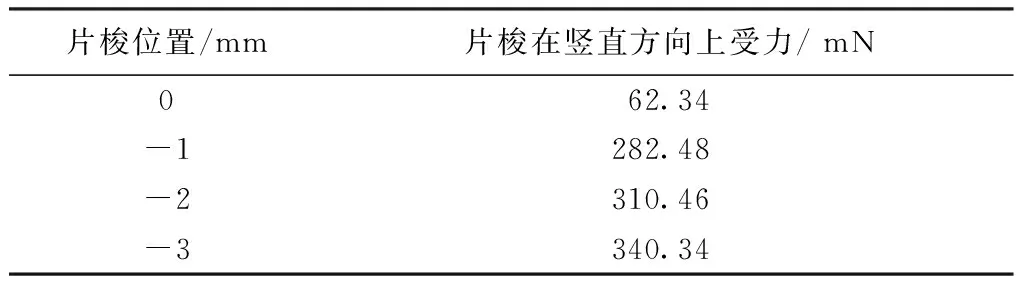
表4 片梭在不同位置受力表Tab.4 Stress at Shuttle in different positions
5 结 论
1)针对片梭织机上使用的机械式扭轴储能投梭原理,本文提出一种基于电磁投射原理的高速磁悬浮式引纬模式。通过电磁投梭理论模型的论证、实验及仿真,证明其投射效率远高于机械式扭轴储能投梭原理,论证了以电代机“零传动”投梭的可行性,从而为该原理进入片梭引纬,提升织机的织造效率奠定了理论基础。
2)针对处于高速运动状态下的片梭,本文设计了磁悬浮筘座及多级筘座阵列系统,能够通过片梭上永磁体与筘座线圈间磁场的相互作用,产生电磁力对片梭进行支撑悬浮,使投射后的片梭能够在引纬过程中保持稳定,与筘座不接触,实现无摩擦引纬。它能够消除引纬过程中片梭与筘座间的摩擦阻力,提高引纬效率。
3)本文通过对电磁驱动磁悬浮式片梭引纬模式的研究与实验,验证了电磁投梭与悬浮式引纬相结合的这一新的片梭织机的引纬原理,为后续该模式实用化奠定理论与设计基础。
FZXB
[1] 夏金国,李金海. 织造机械[M].北京:中国纺织出版社,1999:145-148. XIA Jinguo, LI Jinhai. Weaving Machinery[M]. Beijing: China Textile & Apparel Press, 1999:145-148.
[2] 徐浩贻. 片梭织机的技术进步[J]. 北京纺织,2003(4):43-46. XU Haoyi. Technical progress of projectile loom[J]. Beijing Textile Journal, 2003(4):43-46.
[3] DEIS D W, MCNAB I R. A laboratory demonstration electromagnetic launchers[J]. IEEE Transactions on Magnetic, 1981, 18(1): 16-21.
[4] 邹本贵,曹延杰. 美军电磁线圈发射技术发展综述[J]. 微电机,2011,44(1):84-89. ZOU Bengui,CAO yanjie. Summary of electromagnetic coil launching technology development in American army [J]. Micromotors, 2011,44(1):84-89.
[5] 陈明. 扭轴投梭机构[J]. 华东纺织工学院学报,1981(4):48-55. CHEN Ming. Torsion bar weft insertion mecha-nism [J]. Journal of East China Institute of Textile Technology,1981(4):48-55.
[6] 王莹,肖峰.电炮原理[M]. 北京:国防工业出版社,1994:5-60. WANG Ying, XIAO Feng. Principle of Electric Gun [M]. Beijing: National Defense Industry Press, 1994:5-60.
[7] 刘战伟,陈喜民,董杰,等. 小型霍普金森杆多级电磁发射系统的优化[J]. 实验力学,2015(1):9-16. LIU Zhanwei, CHEN Ximin, DONG Jie, et al. The optimization of multistage electromagnetic launching system of mini-SHB [J]. Journal of Experimental Mechanics, 2015(1):9-16.
[8] 段俊瑞. 片梭织机纬纱飞行速度分析 [J]. 西安工程大学学报,2013(6):711-718. DUAN Junrui. Analysis of weft yarn velocity on the projectile weaving machine [J]. Journal of Xi′an Polytechnic University, 2013(6):711-718.
[9] 张赫,寇宝泉,金银锡,等. 圆筒型Halbach次级结构磁悬浮重力补偿器[J]. 电工技术学报, 2016(6):30-37. ZHANG He, KOU Baoquan, JIN Yinxi, et al. A cylindrical magnetic levitation gravity compensator with Halbach secondary structure [J]. Transactions of China Electrotechnical Society, 2016(6):30-37.
[10] 辛朝军,蔡远文,任元,等. 磁悬浮敏感陀螺动力学建模与关键误差源分析[J]. 北京航空航天大学学报,2016(10):2048-2058. XIN Chaojun,CAI Yuanwen,REN Yuan, et al. Dynamic modeling and key error sources analysis of magnetically suspended sensitive gyroscopes [J]. Journal of Beijing University of Aeronautics and Astronautics, 2016(10):2048-2058.
Establishmentofelectromagneticdrivingmagneticlevitationprojectileweftinsertionprinciples
WU Xiaoguang1, YUAN Bo1, LEI Xiaolong1, ZHANG Chi1, KONG Lingxue2
(1.SchoolofMechanicalEngineeringandAutomation,WuhanTextileUniversity,Wuhan,Hubei430073,China;2.KeyLaboratoryofInnovation,DeakinUniversity,Geelong3217,Australia)
For projectile Loom, torsion bar weft insertion mechanism, exists problems like large impact, low efficiency, high energy consumption, etc. A multi-stage electromagnetic picking principle was proposed. According to the theory of electromagnetic projection, the basic scheme of wefting insertion project/braking and the weft insertion models were established. By the theoretical model, experimental tests and simulation analysis, the conclusion that multistage electromagnetic casting efficiency is better than that of the torsion bar mechanism is obtained; for the projectile motion stability in high speed, the projectile magnetic suspension sley array system was proposed. The theoretical model of electromagnetic casting and magnetic suspension sley was established, and the velocity, acceleration and electromagnetic field coupling characteristics of projectile were analyzed. The feasibility of the electromagnetic drive was verified by the electromagnetic driving accelerated test and ANSYS finite element analysis, and ″zero transmission″ projectile wefting insertion mode was achieved.
electromagnetic driving projectile; weft insertion; magnetic suspension sley array; projectile loom
TS 131.9
:A
10.13475/j.fzxb.20160804907
2016-08-23
:2017-05-28
国家自然科学基金资助项目(51175384);湖北省自然科学基金项目、省数字化纺织装备重点实验室基金(武汉纺织大学)项目(2014CFA099/DTL2017003/ 002)
吴晓光(1954—),男,教授。主要研究方向为新型纺织装备。E-mail:2006wist@163.com。
