一种新型六自由度波浪能装置的水动力学分析
2017-09-16纪志飞何宏舟杨绍辉
纪志飞,林 敏,何宏舟,杨绍辉
(1.集美大学 机械与能源工程学院,福建 厦门 361021;2.福建省能源清洁利用与开发重点实验室,福建 厦门361021;3.福建省清洁燃烧与能源高效利用工程技术研究中心,福建 厦门 361021)
一种新型六自由度波浪能装置的水动力学分析
纪志飞1,2,3,林 敏1,何宏舟1,2,3,杨绍辉1,2,3
(1.集美大学 机械与能源工程学院,福建 厦门 361021;2.福建省能源清洁利用与开发重点实验室,福建 厦门361021;3.福建省清洁燃烧与能源高效利用工程技术研究中心,福建 厦门 361021)
浮子的能量收集效率对于装置发电效率的提升具有重要作用。针对传统浮子式装置仅具有一个自由度的问题,提出了一种新型六自由度波浪能装置。基于线性波理论和MMG(Ship Manoeuvring Mathematical Model Group)方法,建立了新型装置的水动力学模型。分析了此装置的浮子在线性波浪作用下的位移和速度。结果表明:新型六自由度装置可以同时收集浮子六自由度方向的动能,具有较高的波浪能收集效率。另外,浮子在垂荡方向上的动能远大于横荡、纵荡方向上的动能。分析了波浪能收集效率随波浪遭遇角与弹簧系数之间的变化规律,文中工作为新型波浪能装置的优化设计提供了有益参考。
波浪能装置;水动力学;MMG;能量采集效率
随着经济与科技的发展,人们对能源的需求与日剧增。同时,煤、石油、天然气等非再生能源已日渐枯竭,并且对这些能源的过度使用带来的环境污染问题也日趋严重。因此,对新能源的研究、开发及应用已迫在眉睫。波浪能作为一种清洁的可再生能源得到了各沿海国的重视[1-4]。波浪能采集装置也成为国内外的研究热点[5]。我国是一个海洋大国,海岸线总长度超过3.2万km,可利用的波浪能非常丰富[1],开展波浪能采集技术的研究对解决我国能源危机和环境污染问题具有重要的意义。
波浪能采集装置本质上是一种能量转换装置,首先将波浪能转换为机械能,然后再将机械能转换为电能。常见的波浪能采集装置有4种[6]:振荡水柱式、摆式、聚波水库式和浮子式。文献[6]对国内外已有的波浪能采集装置进行了系统的分析,并总结了各类装置的优缺点。在这些装置中,浮子式装置因具有结构简单、效率高等特点,引起了学者们的广泛关注。在波浪的作用下,浮子获得平动动能和转动动能。浮子式波浪能采集装置主要将浮子俘获的平动动能通过直线发电机转化为电能,浮子的转动动能并未得到利用。针对此问题,笔者提出了一种新型六自由度波浪能装置。新装置可以同时将浮子俘获的转动动能和平动动能通过直线发电机转化为电能,它比传统浮子式装置能量收集效率高。当极端风浪作用在张拉整体并联机构能量采集装置上时,装置中的弹簧可以吸收部分能量以减小极端风浪对系统的冲击,因此该装置比传统浮子式装置抵抗极端风浪的能力强。
1 新型六自由度波浪能装置结构描述
本文提出的六自由度波浪能装置如图1所示,该装置由浮子、直线发电机和弹簧组成。B1B2B3B4-B'1B'2B'3B'4为正方体浮子,浮子的长、宽均为L,高为D。A1B4,A2B1,A3B2和A4B1为弹簧,弹性系数分别为K1,K2,K3,K4,原长分别为L01,L02,L03,L04。A1B1,A2B2,A3B3和A4B4为直线发电机,直线发电机两端通过球面副分别与海底和浮子连接。底平台A1A2A3A4为正方形,边长为L。
由于直线发电机分别通过球面副与海底和浮子相连,因此直线发电机可等效为SPS(球面副—移动副—球面副)运动支链。由文献[1]可知,SPS运动支链不会对浮子带来约束,所以装置的浮子在波浪的作用下可产生6个自由度方向的运动,包括横摇(Roll)、纵荡(Surge)、纵摇(Pitch)、横荡(Sway)、垂荡(Heave)和首摇(Yaw),如图2所示。
建立两个坐标系{O}和{O1}。{O}为静坐标系,原点位于底平台A1A2A3A4的中心;{O1}为动坐标系,原点位于浮子B1B2B3B4-B'1B'2B'3B'4的中心。坐标系{O}和{O1}坐标轴的方向如图1所示。为了对装置进行水动力学建模,本文定义横摇和纵荡指的是浮子绕X轴的转动和沿X轴的平动;纵摇和横荡指的是浮子绕Y轴的转动和沿Y轴的平动;垂荡和首摇指的是浮子绕Z轴的转动和沿Z轴的平动。需要说明的是浮子的6个自由度方向的运动并不是独立的,即浮子的平动与平动、平动与转动、转动与转动之间是相互耦合的。
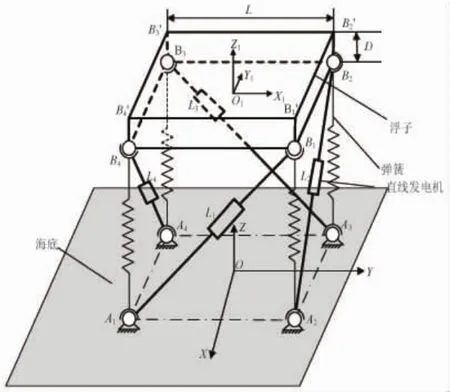
图1 六自由度波浪能装置
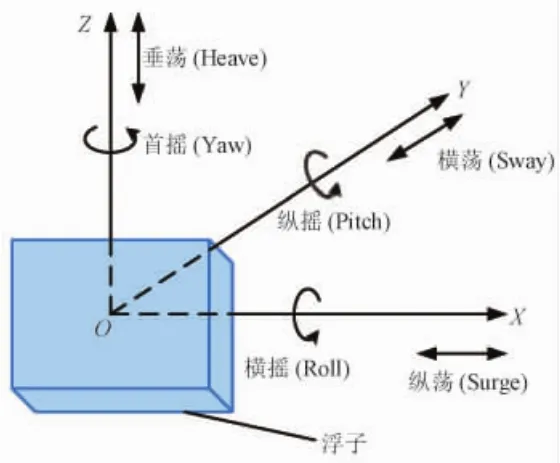
图2 浮子六自由度方向的运动
2 装置水动力学分析
2.1 装置水动力学模型
本文采用MMG(Ship Manoeuvring Mathematical Model Group,简称MMG)模型[2]来建立六自由度波浪能装置的水动力学方程。MMG模型的主要思想是将作用于船舶上的流体动力和力矩分解为作用于裸船体、敞水螺旋浆和舵上的力,然后分别对裸船体、敞水螺旋浆和舵应用牛顿第二定律便可得到船体运动的数学模型。对于图1所示的六自由度波浪能采集装置,浮子可等效为裸船体,且装置系统中没有桨与舵。因此,只需忽略掉MMG模型中桨与舵的受力项,增加弹簧及线性发电机对浮子的作用,便可借助MMG模型的思想建立六自由度波浪能采集装置的水动力学模型。
取浮子为研究对象,基于MMG分离模型,浮子运动方程的一般形式可写为:

式中:m为浮子的质量;g为重力加速度;mi(i= x,y,z)为i向的附加质量;Ii为浮子绕i轴的转动惯量;Ji为浮子绕i轴的附加转动惯量;ωx,ωy,ωz分别为浮子绕X1,Y1,Z1轴的转动角速度;Fi分别为波浪力在i轴的投影,而Mi则为浮子受到的绕i轴的波浪力矩。Si为浮子所受弹性力在i轴的分量,Si0为弹性力绕i轴的转矩。相应地,Bi和Bi0分别为沿i轴的阻尼力及绕i轴的阻尼力矩。vx,vy,vz分别为浮子纵荡、横荡、垂荡的速度。
在式(1)中,ωx,ωy,ωz,vx,vy,vz均为坐标系{O1}下浮子的转动和平动速度,为了求解式(1),仍然需要建立浮子运动的辅助方程,即将ωx,ωy,ωz,vx,vy,vz用坐标系{O}下的广义变量来描述。由于装置具有六个自由度,所以需要6个广义变量来描述浮子的运动,广义变量选为X=[x,y,z,α,β,γ]T。x,y,z分别表示坐标系{O}下浮子质心的坐标,α,β,γ分别为坐标系{O1}绕{O}的X,Y,Z轴的转动角度。选用RPY形式的欧拉角,旋转顺序为先绕X轴旋转α角,再绕Y轴旋转β角,最后绕Z轴旋转γ角,旋转矩阵可写为:

运动辅助方程为:

接下来,推导浮子所受到的力、力矩,包括波浪力、力矩、阻尼力、力矩和弹簧力、力矩。
(1)波浪力(矩)
基于傅汝德—克雷诺夫假设,在线性波浪的作用下,浮子受到的波浪力可用下式计算[3]。
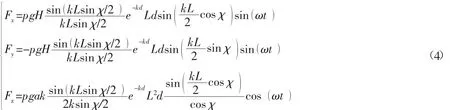
浮子受到的波浪力矩为:
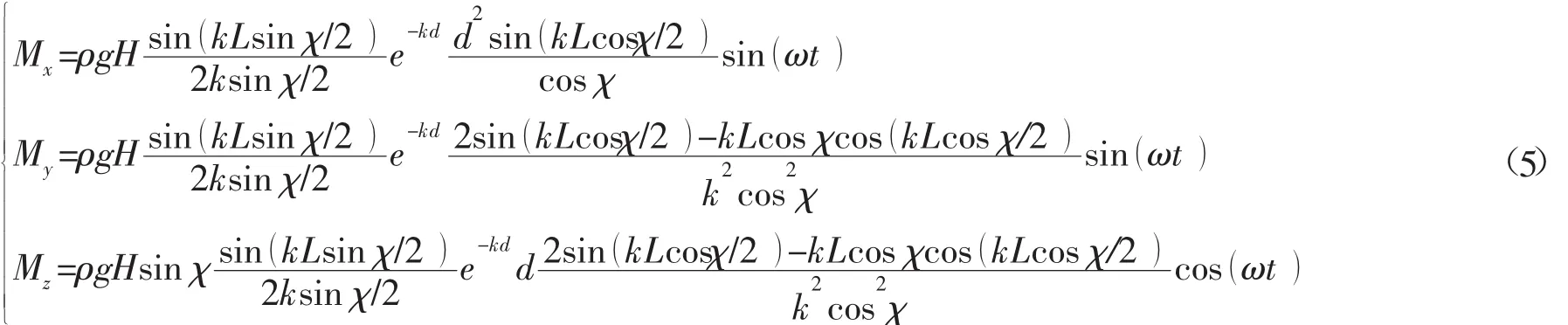
式(4)~(5)中:ω为波浪的角频率;χ为波浪遭遇角度;k为波数;d为浮子的吃水深度。
(2)弹性力(矩)
浮子受到的弹性力主要来自于弹簧。由于弹簧对浮子的作用力为有势力,弹簧对浮子的作用力在广义坐标方向的分量等于势能对广义坐标的偏导数。在坐标系[2]和{O1}中,易求出Ai(i=1,2,3,4)和Bi的坐标,从而可推导系统的势能为:

将U对广义变量 [x,y,z,α,β,γ]T求偏导可得浮子受到的弹性力、弹性力矩为:
(3)阻尼力(矩)
浮子运动的过程中受到的阻尼主要包括线性阻尼、辐射阻尼和动力输出阻尼。由于本文主要研究储能元件 (弹簧)对装置浮子六自由度运动的影响,因此可假定动力输出阻尼为零。此时,浮子受到的阻尼力和力矩可写为:

式中:bx,by,bz分别为X,Y,Z方向上线性阻尼系数;bvx,bvy,bvz分别为X,Y,Z方向上辐射阻尼系数;brx,bry,brz分别为绕X,Y,Z轴转动的阻尼系数。
通过式(3)可以反求出vx,vy,vz,ωx,ωy和ωz。将vx,vy,vz,ωx,ωy,ωz与式波浪力(矩)、弹性力(矩)、阻尼力(矩)分别代入式(1),可得六自由度波浪能采集装置的水动力学模型如下:

从式(10)可以看出,六自由度波浪能采集装置的动力学模型为关于6个变量的二阶微分方程组。给定初始条件,通过龙格库塔法可以对其进行数值求解。
2.2 装置波浪能采集效率
线性波浪所蕴含的能量主要体现在水的动能和势能。由文献[10]可知,线性波浪的总能量为:


式中:c为波浪的传播速度;i为波浪传播方向的单位矢量。对于六自由度波浪能采集装置,其采集到的能量为波浪总能量与阻尼消耗掉的能量之差。本文假定波浪能采集装置的动力输出阻尼为零,在这种情况下,装置的能量采集效率可由式(13)计算:
式中:b为波宽。波浪的功率定义为单位周期内线性波浪的总能量,其形式如式(12):
3 数值仿真
线性波浪的参数选为:H=1 m;T=2 s;h=10 m;浮子的几何参数选为:L=3 m;d=0.25 m.弹簧的参数选为:原长L01=L02=L03=L04=1 m,弹性系数K1=K2= K3=K4=K=50 N/m.可以计算式(10)表示的水动力学模型的仿真参数见表1。
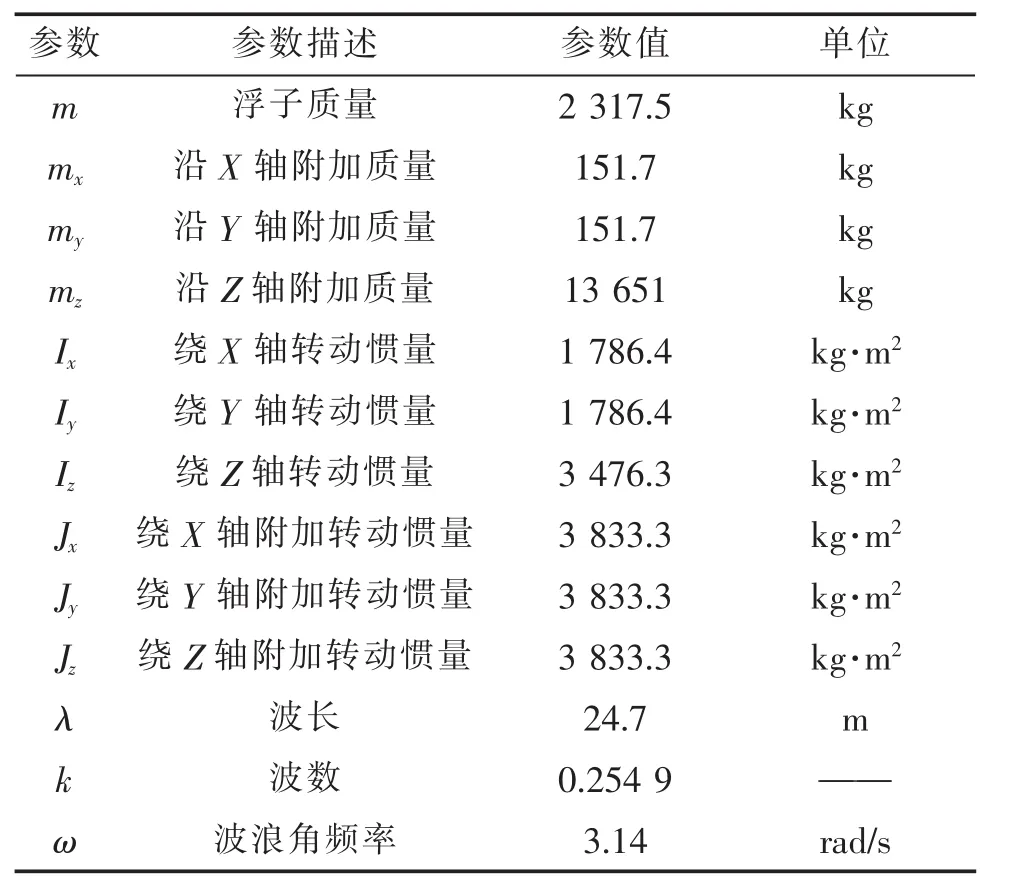
表1 水动力学仿真参数
不妨设波浪遭遇角为χ=π/4,此时可计算浮子受到的波浪力(力矩),如图3所示。对比图3(a)~(f)不难看出,浮子受到动力波浪力及力矩均为时间的正(余)弦函数,且频率和线性波浪的频率相同。对于浮子的3个平动,它在垂荡方向上受到了较大的力;对于浮子的3个转动,它在绕Y轴方向上受到了较大的转矩。对式(10)进行数值求解可以得到浮子在6个自由度方向上的运动规律,如4所示。
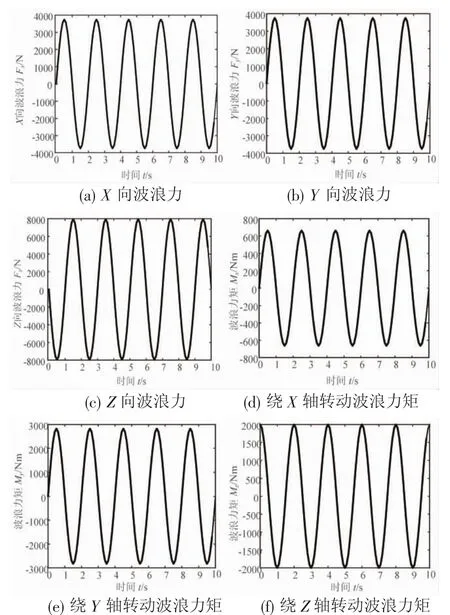
图3 浮子受到的波浪力及力矩
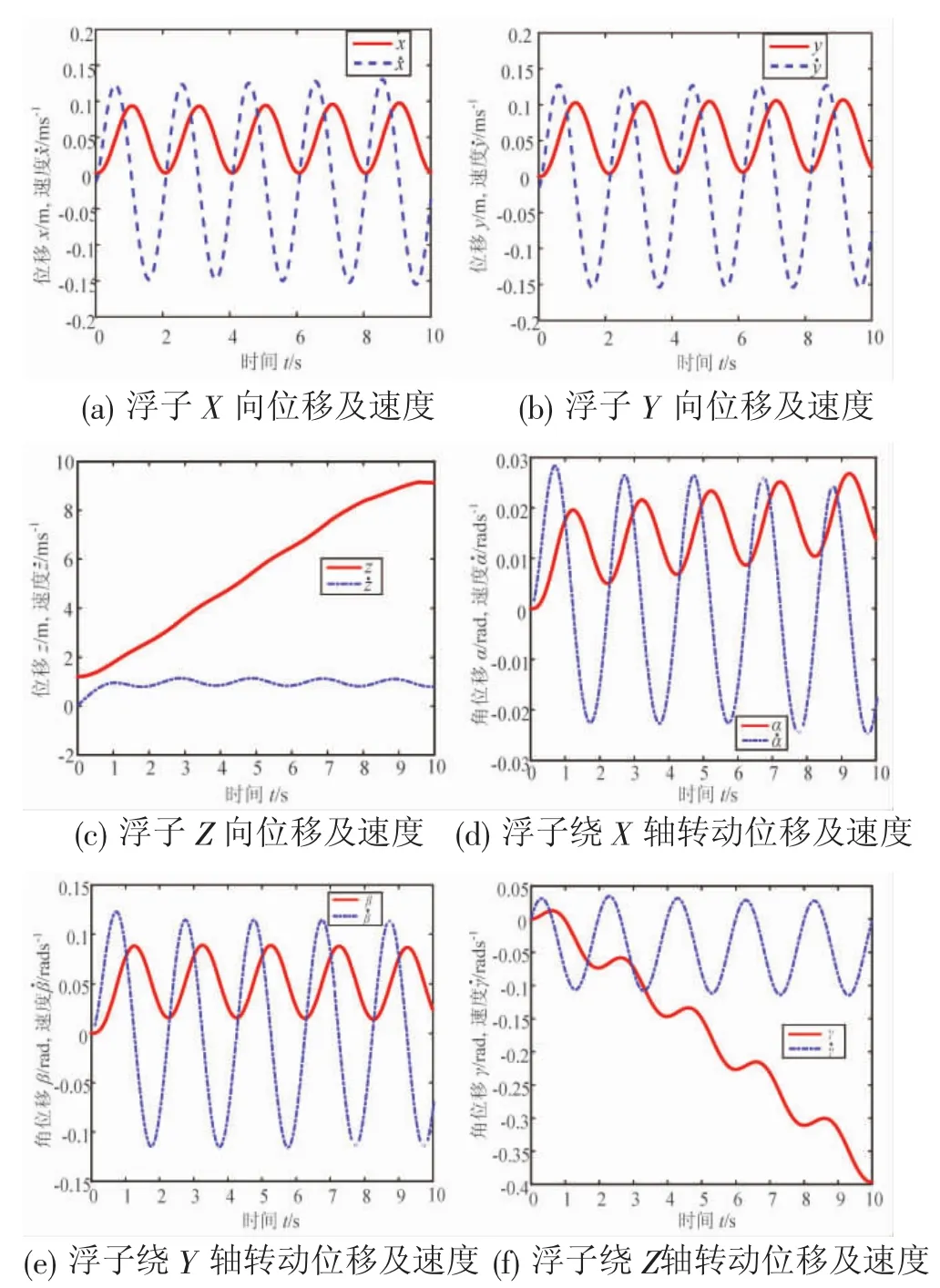
图4 浮子六自由度运动规律
从图4(a)~(c)中可以看出,当波浪遭遇角χ=π/4时,浮子的横荡和纵荡运动均为往复运动,横荡的平衡位置为x=0.05 m,纵荡的平衡位置为y=0.05 m,并且浮子横荡和纵荡的速度大致相同。在5个周期内,浮子的垂荡运动逐步由初始位置z=1 m过度到z=9 m处,且浮子垂荡的速度远大于横荡、纵荡的速度。对比图4(d)~(f)可知,浮子横摇、纵摇、首摇的速度大致相同。纵摇为往复运动,平衡位置为β=0.05 rad。横摇运动可近似为往复运动,横摇角位移的总体趋势是增加的。在浮子横摇、纵摇和首摇运动中,首摇运动的角位移增加趋势明显。已知浮子在6个自由度方向上的运动规律后,可计算装置的能量采集功率如图5所示。
由图5可以看出,装置的功率P近似为时间的周期函数,周期与线性波浪的周期几乎相等。在刚开始运动的一个周期内,装置的功率有一定的波动。一个周期过后,功率P进入稳定状态。平均功率为Pave=7.27 kW。此时,由式(13)可计算出装置的能量采集效率为η=87.9%。假定弹簧具有相同的弹性系数K,保持波浪遭遇角不变,通过改变K的取值可得到在平均功率Pave随K的变化规律,如图6所示。保持波浪参数和装置几何参数不变,通过改变波浪遭遇角χ的取值可得到平均功率随波浪遭遇角的变化规律,如图7所示。
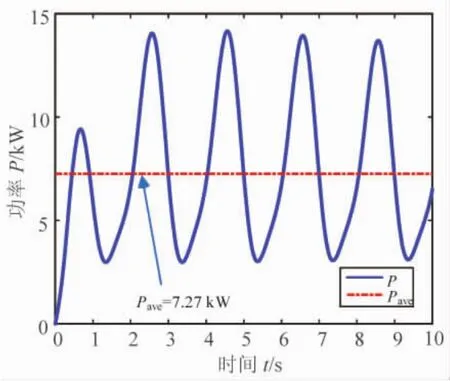
图5 六自由度波浪能采集装置能量采集功率
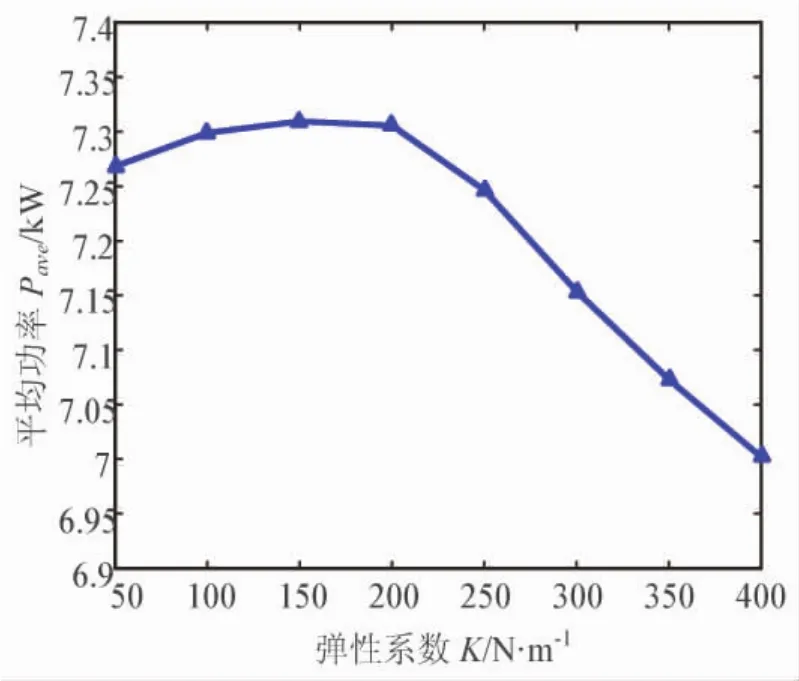
图6 平均功率随弹性系数K的变化规律
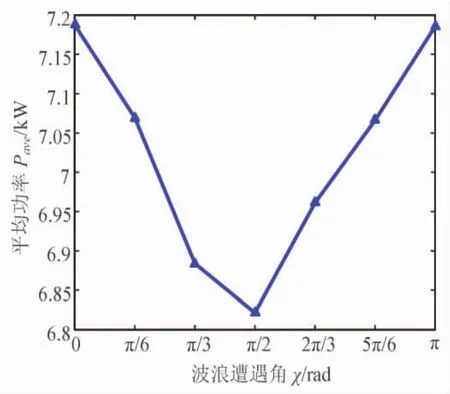
图7 平均功率随波浪遭遇角的变化规律
由图6可以看出,在区间K∈[50,400]N·m-1内,随着K的增加,平均功率呈现先增加再减小的趋势,且在K=200左右到达峰值。装置的平均功率在过了峰值以后下降的趋势明显,这说明弹性系数K的选择对与装置的能量采集功率具有重要作用。
由图7可以看出,当装置的几何参数和波浪参数确定后,波浪遭遇角为零或π时系统具有较高的能量采集效率,此规律对于自动迎浪系统的设计具有重要的参考意义。
4 结论
本文提出了一种新型六自由度波浪能装置。基于线性波理论和MMG方法,建立了装置的水动力学模型,分析了浮子的运动规律,探讨了波浪能收集效率与波浪遭遇角和弹簧弹性系数之间的规律。得到的主要结论如下:
(1)在线性波浪的作用下,浮子的横荡和纵荡运动均为往复运动,并且浮子横荡和纵荡的速度大致相同。浮子垂荡的速度远大于横荡、纵荡的速度。
(2)浮子横摇、纵摇、首摇的速度大致相同。纵摇为往复运动,横摇运动可近似为往复运动,横摇角位移具有增加的趋势。在浮子横摇、纵摇和首摇运动中,首摇运动的角位移增加趋势明显。
(3)浮子沿Z轴的位移和速度以及绕X轴转动的转角及角速度均可近似为时间的周期函数,其周期与线性波浪的周期相同。
(4)在区间K∈[50,400]N·m-1内,随着K的增加,平均功率呈现先增加再减小的趋势,且在K= 200左右到达峰值。装置的平均功率在过了峰值以后下降的趋势明显。当装置的几何参数和波浪参数确定后,波浪遭遇角为零或π时系统具有较高的能量收集效率。
[1]ZhangD,Li W,Lin Y.Wave energyin China:Current status and perspectives[J].Renewable Energy,2009,34(10):2089-2092.
[2]Montoya F G,Aguilera MJ,Manzanno-Agugliaro F.Renewable energy production in Spain:A review[J].Renewable and sustainable energyreviews,2014,33:509-531.
[3]Korde UA,Ertekin R C.On wave energyfocusingand conversion in open water[J].Renewable Energy,2014,62:84-99.
[4]Santiago O,Andres F O,Pablo A.Estimation of the wave power resource in the Caribbean Sea in areas with scarce instrumentation. Case study:Isla Fuerte,Colombia[J].Renewable Energy,2013,57:240-248.
[5]JeffS,Paul J.Harvestingocean wave energy[J].Science,2009,323(5918):1176-1178.
[6]Falcão A F.Wave energy utilization:A review of the technologies [J].Renewable and sustainable energy reviews,2010,14(3): 899-918.
[7]纪志飞.3-SPS张拉整体并联机构的构型综合与运动性能分析及能量采集研究[D].西安:电子科技大学,2014.
[8]张显库,贾欣乐.船舶运动控制[M].国防工业出版社,2006.
[9]张秀凤,尹勇,金一丞.规则波中船舶运动六自由度数学模型[J].交通运输工程学报,2007,7(3):40-43.
[10]Mccormick ME.Ocean wave energyconversion[J].Renewable Energy,1981,1(11):1309-1319.
Hydrodynamic Analysis of a Novel 6-DOF Wave Energy Converter
JI Zhi-fei1,2,3,LIN Min1,HE Hong-zhou1,2,3,YANG Shao-hui1,2,3
1.College of Mechanical and Energy Engineering,Jimei University,Xiamen 361021,Fujian Province,China;
2.Key Laboratory of Clean Energy Utilization and Development of Fujian Province,Xiamen 361021,Fujian Province,China;
3.Fujian Engineering Technology Research Center of Clean Combustion and Efficient Use of Energy,Xiamen 361021,Fujian Province,China
The energy collecting efficiency of the float is of great importance for improving the efficiency of electricity generation of the wave energy converter.To improve the energy collecting efficiency of conventional floating wave power devices,a novel 6-DOF wave power converter device is proposed in this paper.On the basis of Airy's linear wave theory and MMG (Ship Maneuvering Mathematical Model Group),the hydrodynamic model of the novel device is developed,so as to analyze the motion laws of the float.The results indicate that the proposed novel 6-DOF wave energy converter has high efficiency of energy collecting and can harvest the kinematical energies along the directions of roll,surge,pitch,sway,heave and yaw.In addition,this paper analyzes the evolution process of the energy collecting efficiency along with incident angle of wave and stiffness of springs.This work can provide helpful references for designing and optimization of the novel 6-DOF wave energy converter.
wave energy converter;hydrodynamics;MMG;energy collecting efficiency
P743.2
A
1003-2029(2017)04-0007-07
10.3969/j.issn.1003-2029.2017.04.002
2017-04-09
福建省自然科学基金资助项目(2017J05084);校预研基金资助项目
纪志飞(1984-),男,博士,讲师,主要研究方向为可再生能源开发与利用。E-mail:jizhifei@jmu.edu.cn
