滑动回归最小二乘算法在某电动振动台模型辨识中的应用
2017-08-30严侠,邓婷
严 侠,邓 婷
(中国工程物理研究院总体工程研究所,四川 绵阳 621900)
滑动回归最小二乘算法在某电动振动台模型辨识中的应用
严 侠,邓 婷
(中国工程物理研究院总体工程研究所,四川 绵阳 621900)
为了能够准确地建立电动振动台的仿真模型,了解电动振动台系统特性,笔者在分析电动振动台数学模型的基础上,利用先进的滑动回归最小二乘辨识算法,有效地开展了电动振动台这一复杂电力学系统阶数和时延的确认,参数估计,并最终建立了系统的ARMA模型;文章最后,举出了某型电动台空台面和另一型振动台带滑台的模型辨识结果,并通过正弦扫频试验给予验证;结果表明,该算法辨识精度高,收敛速度快,鲁棒性强,能克服一定的噪声,对于高阶线性系统辨识具有良好的辨识效果。
电动振动台,最小二乘, ARMA模型,正弦扫频振动
0 引言
实验室开展的振动试验可用于考核武器系统、航天航空飞行器等机电类产品对振动环境的适应性能力。通过振动试验可以充分掌握或了解产品的结构和动力学特性,并且评价其在振动环境下的功能可靠性,为产品的设计、改进提供参数和依据。电动振动台作为振动试验的主体关键设备,以其控制频带宽、易于实现等优点得到了广泛的应用。开展电动振动台模型分析与辨识研究,一方面能够对电动振动台系统的内部结构和工作原理有更进一步的了解,有助于准确掌握其特性与性能。同时,通过建立逼真的电动振动台仿真模型,还能为开展振动试验控制技术研究和振动试验仿真技术研究提供控制和研究对象。
系统辨识工作早在19世纪70年代开始,有许多经典的参数辨识方法已经成功地应用在许多辨识问题上,这些方法包括最小二乘(LG),广义最小二乘(GLS),增广最小二乘(ELS),辅助变量法(IV)等〔Ljung and Söderström,1983[1];1987;Söderström and Stoica,1989[2];Johansson,1993[3]等〕。但在系统遭受有色或相关噪声时,(LG)将产生有偏估计,对于广义最小二乘,增广最小二乘,辅助变量法以及多阶的最小二乘法〔MSLS〕〔Hsia,1975[4]〕等,都必须了解一定的噪声信息,这将给实际工业辨识问题带来困难。
本文引入了滑动回归最小二乘辨识算法(Shyh-hong Hwang and Min-Lang Lin,2002〔5〕)。该算法主要利用了一个时间加权的数字滤波器对测得的输入输出数据进行前期处理,以削弱系统噪声对辨识的影响。算法收敛速度快,鲁棒性强,在模型阶数失配以及采样周期和时间延迟选取不是很合理的情况下,仍能得到接近真实模型的奈奎斯特曲线,可用于系统的模型阶数和延迟的确定,高阶系统的降阶和线性化处理;同时,在系统遭受有色噪声时参数辨识也能接近无偏估计。对电动振动台系统而言,电动振动台与它的前级功率放大器组成了一个具有非线性和时变因素的复杂电力学系统。同时,设备运行中不可避免地遭受50Hz工频干扰为主的各种电磁电路干扰。因此,利用滑动回归最小二乘算法,对该振动台系统进行降阶和线性化处理,建立离散ARMA模型是可行的。
1 电动振动台系统的模型分析

图1 电动振动台三维结构示意图
电动振动台三维结构示意图如图1所示。电动振动台主要由动圈(运动部件)、动圈导向装置、台体、空气弹簧以及安装底座组成。电动振动台是根据电磁感应原理,由台体励磁提供在工作磁隙中的较强磁场,通过给动圈电枢通上交变的电压及电流而产生运动,通常采用静压轴承为动圈振动导向,空气弹簧用于与地基隔振。电动振动台是一个很复杂的机电系统,要精确的建立其数学模型是十分困难的,忽略其非线性和时变的因素。电动振动台的数学模型[6]主要由动力学和电学模型组成。
电动振动台的动力学模型如图2所示,首先,电动振动台通常使用空气弹簧(刚度为KB),来保证振动台体进行垂向振动,同时将振动台体(质量为MB)的振动与建筑物地面隔离。其次,动圈(电枢组件MT+Mc)和台体(MB)之间也采用柔性连接方式(比如U形弹簧),对应弹簧(KS)和阻尼(CS),最后,将电枢和台面之间看作是弹性体,在模型中把动圈(Mc)和台面(MT)当作是用弹簧(KC)和阻尼(Cc)连接起来的两个分离质量,当安装有试验对象(MD)时,还会增加弹簧系统质量。
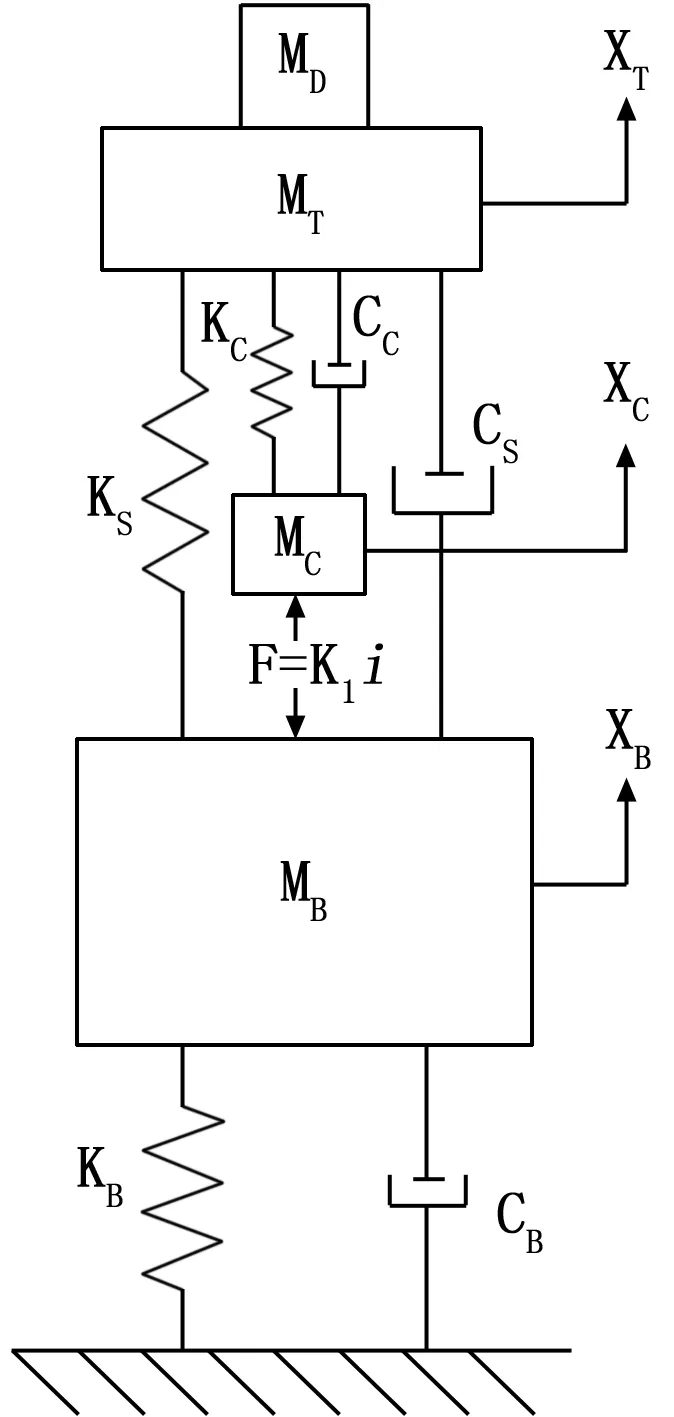
图2 振动台的力学模型
振动台的电学模型如图3所示,这里必须考虑电枢的电阻和电感。线圈电阻R定义为一个在振动台输入端子处(测量)表现出的最小阻抗。这个电阻随着温度有所增加,随着频率有轻微增加(由于集肤效应)。线圈的电感与铁磁极件强烈耦合,振动台振动时引入反生电动势eback。整个电学回路,由振动台的前级(功率放大器)提供外部电压e和电流i来驱动电学回路。
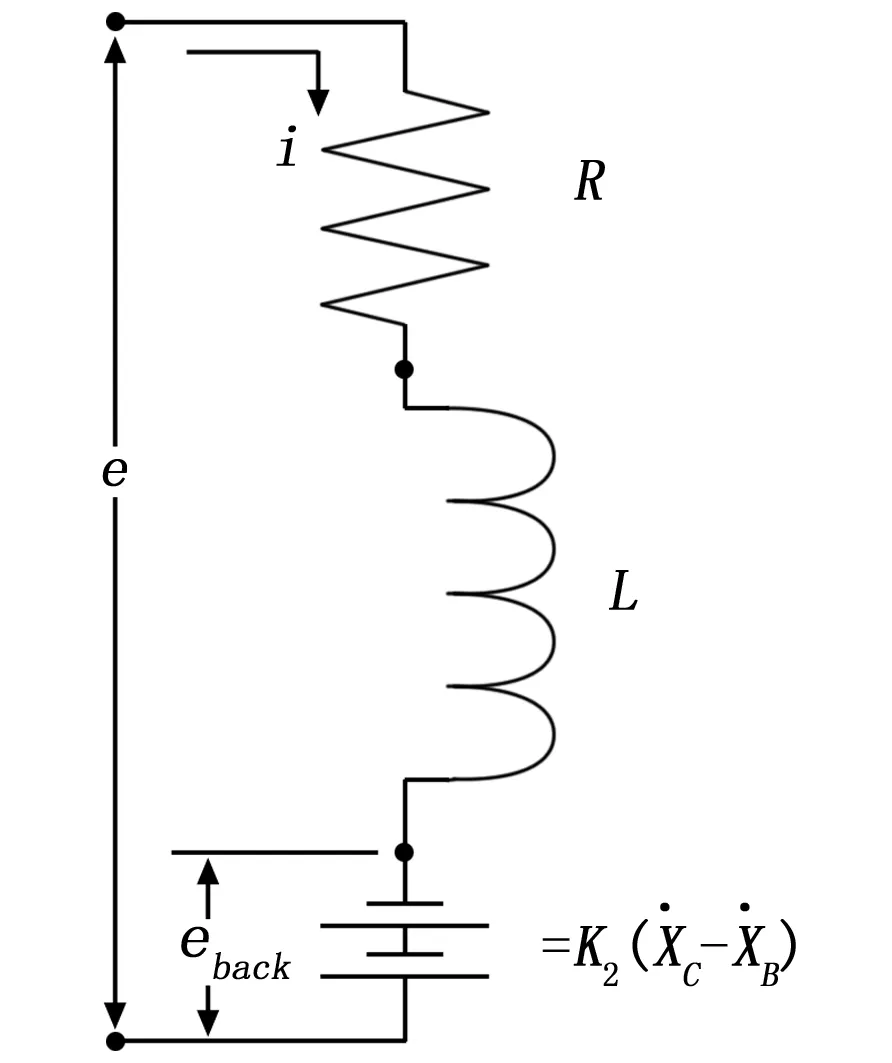
图3 电动振动台的电学模型
振动台的力学部件和电学部件是互相耦合的,机械系统被与电流成比例的力激励,而电路被与机械速度成比例的内部电压(反电动势)所激励。根据以上关系整个系统的微分方程组表示为:
(1)
系统工作中,由于阻抗受温度和频率而变化。同时,振动台的前级功率放大器作为其驱动也与电动台的电学模型偶合在一起的,组成了一个复杂的带有非线性和时变因素的高阶系统。在电动振动台建模过程中,首先忽略阻抗慢变问题,根据式(1)的方程关系,要准确获得其模型,需要获得质量、刚度及阻尼的多个参数,实际建模过程中是很难做到的。因此,要准确地建立电动振动台模型,采用系统辨识的方法将更加有效。
这里,假定功率放大器是线性定常系统,电动振动台系统可以看成是一个高阶线性模型,其ARMA模型如下。
A(z-1)y(k)=B(z-1)u(k)
(2)
这里,
(3)
其中,d表示系统延迟,n表示系统阶数,这里n=m。
2 滑动回归最小二乘辨识算法
该算法是由黄世宏等人提出的,该算法鲁棒性强,在有色或相关噪声情况下仍能取得满意的估计结果,同时在针对大噪声情况下和模型失配情况下,仍能得到接近真实模型的奈奎斯特曲线,获得良好的辨识效果。
2.1 时间加权数字滤波器
为了减少有色噪声带来的辨识偏差,引入一个时间加权的数字滤波器,在[ta,tb]时间区间上处理输入,输出数据u(k),y(k)。[ta,tb]时间区间上的时间权函数为,

(4)
这里p为权函数阶数。对采集数据f(k)在[ta,tb]区间上,令,

r=0,1,2,…
(5)
则有,

(6)
注意到,当r≤p时
w(ta+i)=0i=0,1,2,…,r-1
w(tb+j)=0j=1,2,…,r
由(6)式可得下式成立,

(7)
应用该滤波器,当p≥n,系统的ARMA模型转化为,
(8)
这里回归向量ψ和参数向量θ表达如下,


(9)
θ=[a1,…,an,b1,…,bn]T,
(10)
(11)
2.2 滑动回归最小二乘参数估计法(MRLS)
注意到,式(8)是任意选择时间间隔[ta,tb],p≥n。
ta=m-h,tb=m,p=n
式(8)转化成,
ξ(m)=φ(m)Tθ
(12)
系统离线辨识,要求,h≥n+2,这里m表示当前时刻,


(13)
这里,
μ(m)=1/[1+φ(m)TP(m-1)φ(m)],
P(m)=[I-μ(m)P(m-1)φ(m)φ(m)T]×P(m-1)
2.3 系统的阶数和时间延迟的辨识
根据误差均方求和函数,建立标准。
(14)
3 振动台模型辨识实例分析
以辨识某型电动振动台空台面和另一型电动振动台带滑台的模型为例。辨识中,利用振动控制器产生在给定辨识频带范围内(5~3 000 Hz和5~2 000 Hz)的随机谱,进行(0.08 g2/Hz)(g是加速度单位,1 g=9.8 m/s2)量值上的随机振动试验。同时,采集振动台系统的输入,输出数据,取采样频率为10 kHz,整个系统的信噪比在3%左右。此外,再进行相同频带范围内的正弦扫频振动试验,来求取其振动台模型的幅频特性,并将其与辨识结果比较。
3.1 某型电动振动台空台面模型辨识
根据系统辨识数据,运用滑动回归最小二乘算法,进行该振动台模型辨识。根据式(14)确定系统的阶数和延迟。模型阶数和延迟辨识结果如图4的J函数曲线。

图4 J函数曲线
从图4中可以明显看出,在阶数为6和延迟为1处,J函数明显下降。表明模型的阶数和延迟分别近似为6和1,该结果也吻合于所分析的振动台数学模型。这里我们选取辨识系统的阶数分别为6和7,延迟为1,利用该参数估计算法,得出系统的ARMA模型参数分别为,
θ1=[-3.220,5.2960,-5.7752,4.1745,-1.8617,0.4071,
0.2415,0.1140,-0.7687,0.6811,-0.2610,-0.0072]
θ2=[-3.2450,5.3486,-5.816,4.1759,
-1.8130,0.3523,0.0179,0.1864,0.0020,
-0.3812,0.2684,-0.0076,-0.0731,0.0049]
对应模型的幅频曲线分别如图5~6。同时6阶辨识模型下的参数辨识情况如图7所示,图中可以看出,到80步左右参数已经趋于稳定,但有一定慢变,这正是由于电动振动台具有一定非线性和参数慢变所造成的。此外,对该振动台空台面进行了10g下的正弦扫频试验,试验中加速度计的灵敏度系数为100mv/g,所获得的系统幅频特性如图5~8。
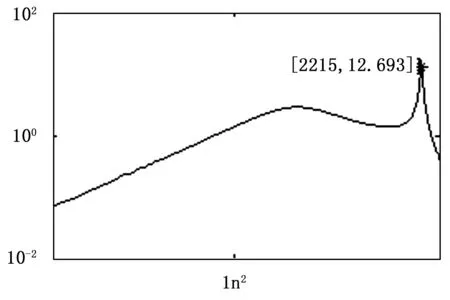
图5 空台面6阶辨识模型的幅频曲线
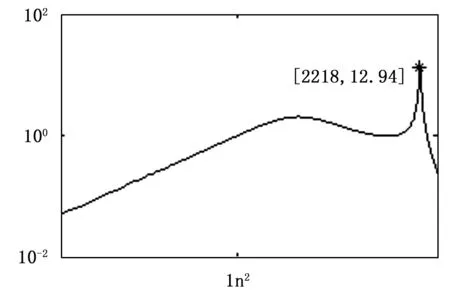
图6 空台面7阶辨识模型幅频曲线

图7 800步内的辨识参数θ1
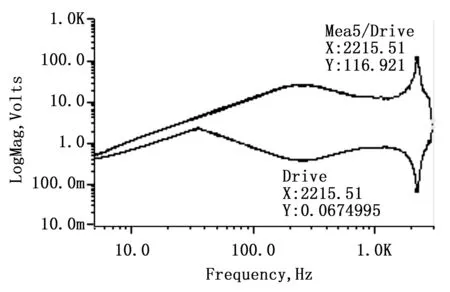
图8 正弦扫频下空台面模型幅频特性曲线
3.2 另一型电动振动台带滑台模型辨识
根据辨识数据,运用同样的辨识方法。这里选取系统的阶数为13,延迟为1。振动台带滑台的ARMA模型参数辨识结果为,
θ3=[-3.7425,7.0697,-8.9151,8.4603,-6.3591,
3.3625,-0.3656,-1.5232,2.0875,-1.9575,
1.5692,-0.9259,0.2470,0.0552,-0.4437,1.6069,
-3.5384,5.8147,-7.9050,9.4501,-9.7826,
8.1502,-4.9759,1.9137,-0.3180,0.0282]
对应得出模型的幅频曲线如图9。此外,在20g下的正弦扫频试验所获得的系统幅频特性如图10,这里加速度计的灵敏度系数为10mv/g。
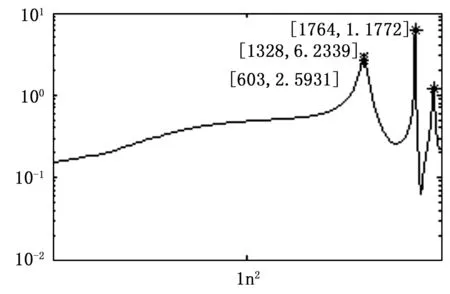
图9 带滑台13阶辨识模型的幅频曲线
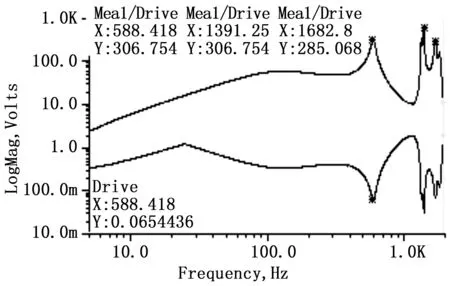
图10 正弦扫频下的带滑台模型幅频特性曲线
比较图5~10,其辨识的模型与真实的模型的幅频特性很接近,一方面成功地实现了振动台模型的参数化,另一方面也表明该辨识算法可靠,鲁棒性好,辨识精度高,针对高阶系统辨识,也能取得较高的精度。
4 结语
本文通过建立电动振动台的数学模型,运用滑动回归最小二乘辨识算法,成功地完成了电动振动台的建模和模型辨识。列举了电动振动台两种状态下的辨识结果。结果表明,滑动回归最小二乘算法鲁棒性强、辨识精度高,较好地实现了电动振动台这一复杂高阶电力学系统的模型辨识。
[1]LjungL,SöderströmT.TheoryandPracticeofRecursiveIdentification[M].MITPress,Cambirdge(1983).
[2]SöderströmT,StoicaP.SystemIdentification[M].PrenticeHallInternational,U.K.(1989).
[3]JohanssonR.SystemModelingandIdentification[M].PrenticeHall,EnglewoodCliffs(1993).
[4]HsiaTC.OnMultistageLeast-SquaresApproachtoSystemIdentification[A].ProceedingsofIFACSixthworldCongress[C].Paper18.2,Boston(1975).
[5]Hwangshyhhong,LinMinlang.Amethodforidentificationofdiscreteparametricmodelwithunknownordersanddelays[J].ChinInstChemEngrs, 2002,33(4):373-388.
[6]Georgefoxlang,DaveSnyder.Understandingthephysicsofelectrodynamicshakerperformance[J].SoundandVibration, 2001,35(10):24-33.
Application of Moving-Horizon Recursive Least squares Algorithmin Model Identification for a Electrodynamic Shaker
Yan Xia, Deng Ting
(Institute of System Engineering, China Academy of Engineering Physics, Mianyang 621900,China)
In order to accurately establish the simulation model of electric vibration table, to understand the characteristics of electric shaking table system. Author firstly analyzes the mathematics model of the electrodynamic shaker, and secondly uses the advanced Moving-Horizon recursive least squares algorithm (MRLS) to determine the electrodynamic shaker system order and time delay and estimate the parameters of the system. Finally the ARAM model of the electrodynamic shaker is built. In this paper end, the identification result of a electrodynamic shaker with empty table and another electrodynamic shaker with slip table is given and is verified by making sine sweep vibration tests. The result shows that MRLS algorithm has a good identification capability and strong robustness for the high order line system.
electrodynamic shaker; least-squares estimation; ARMA model; sine sweep vibration
2016-12-06;
2017-02-21。
严 侠(1977-),男,四川成都人,硕士,高级工程师,主要从事振动控制与振动试验装备研发方向的研究。
1671-4598(2017)07-0202-04
10.16526/j.cnki.11-4762/tp.2017.07.050
TP216
A
