基于相关性原理起重机负载电机监测系统设计
2017-08-30吕金龙黄细霞吴晓越
吕金龙,黄细霞,吴晓越
(上海海事大学 航运技术与控制工程交通行业重点实验室,上海 201306)
基于相关性原理起重机负载电机监测系统设计
吕金龙,黄细霞,吴晓越
(上海海事大学 航运技术与控制工程交通行业重点实验室,上海 201306)
对起重机负载电机进行了研究,采用西门子公司的S7-200 SMART PLC采集负载电机的机械振动信号,通过工业Wi-Fi无线模块以无线数据包的形式将采集的数据汇总到上位机LabVIEW监测平台;上位机的LabVIEW监测平台对电动机振动信号进行相关性和频谱分析,将实时振动数据频谱信号和已知常见负载电机的轴承外圈故障、轴承内环故障和滚子故障3种典型的故障状态频谱信号进行相关性运算,得到实时信号与已知状态的相关系数;提出了以相关系数作为故障诊断判定阈值的方法进行故障诊断,实现了对起重机状态进行监测以及监控信息发布。
起重机;状态监控;相关性原理;工业无线;故障诊断
0 引言
随着工业化不断推进,作为主要工业设备的工业起重机被广泛应用于车间、港口码头、电站、海上钻井平台、高层建筑等场所。。传统起重机存在诸多不足之处,为了适应工业发展,要求起重机安全可靠、先进、快速、精确定位及运行平稳,同时趋向大吨位、高效率、自动化、智能化及多用途方向发展。作为生产作业的重要装卸设备,起重机逐渐呈现设备大型化、生产效率高、技术复杂和作业连续性强等特点,其运行状态的好坏直接影响着国民生产效率和经济效益[1-2]。远程监控技术广泛应用于工业生产现场设备分布零散或数据不易采集的场合,实施及时地监视设备的运行状态并进行有效控制。利用可编程控制器PLC模块以及人机交互模块等为操作人员提供更直观、全面的系统工作参数和状态信息,进而提高整机控制技术水平和应用效率,具有图形化、交互式显示、监测及智能诊断等功能,实现整个体系的集中诊断接口以及安全监控,可大大降低劳动成本,提高生产效率[3-4]。
传统起重机状态检测通过人工、定时、定点的方法完成,检测手段简单、状态评估依靠人工经验。近年来随着人工智能的不断发展,一些学者利用人工神经网络理论对起重机机械系统工作状态进行智能监测和故障诊断,快速确定故障类型,提高了故障诊断率[5]。工业网络技术快速发展,采集起重机的各种电控系统的信号或信息,实现起重机电控系统的全面计算机图形化监控、故障监控和跟踪;通过远程服务和远程监控手段,可以实现快速服务响应,极大提高设备故障排除时间,保障设备工作效率[6-7]。国外公司如B&N公司、亚特兰大公司、IRD公司、日本的安川公司和住友公司利用移动通信技术、智能传感技术以及超高速交换路由技术等技术开发了一些高性能的起重机状态监测系统[8]。国内一些科研单位及高等院校如上海交通大学、华中科技大学等相继研制了多种起重机状态监测和故障诊断系统[9-10]。为确保起重设备的安全运行,提高起重机的使用寿命和利用率,从起重机的历史数据中找到起重机运行的客观规律,为起重机的现代化管理提供可靠的依据成为现代化起重机状态监测的新方向[11-12]。
振动监测是起重机状态监测与故障诊断的重要方法[13]。本文提出一种将振动频谱分析和相关性原理相结合应用于起重机的状态监测与故障诊断系统设计了起重机负载电机无线远程状态监测系统。
1 理论基础
1.1 FFT频谱分析方法
快速傅里叶变换 (FFT)是实现离散傅里叶变换 (DFT)的快速算法,它利用旋转因子w的周期性和对称性,使N点DFT的乘法计算量由N次降为(N/2)log2N次,设X(n)是长为N的复序列,其中DFT定义为:

(1)


(2)
(3)
因此可得:
(4)

所以, 公式(2)可表示为:

(5)
其中:
由于,均为N/2点的DFT。公式(3)只能确定出X(k)的k=0,1,2,…,N/2-1个,即前一半的结果。
(8)
所以:

(9)
可见,X(k)的后一半,也完全由,的前一半所确定。N点的DFT可由两个N/2点的DFT来计算,这种方法使工程计算更加简单,用于工业控制计算实时性更高。
1.2 相关性理论
互相关函数反映的是两个随机过程不同时刻变量之间的相互关系,通俗地讲,就是两个信号不同时刻之间的互相关系。动态函数x(t)和y(t)的互相关函数Rxy(τ)定义为:
(10)
互相关函数在实际应用中,可以用来排除噪声干扰,提取感兴趣的有用信息,检测出有用的信号。对有限长序列,常用式:
(11)
来估计互相关函数相应的相关系数:
(12)
根据实时振动信号经过FFT变换后的信号频谱特征,通过计算实际振动频谱信号和样本振动频谱信号间互相关系数。每个样本振动频谱所对应的电机状态通过实验已经知道,作为状态诊断的参考样本。通过比对振动频谱信号和每个样本振动频谱互相关系数,与所对应的振动样本信号互相关系数越大,则实际电机状态与样本此时的电机状态越接近,以此来监测电机的状态和故障类型。
2 系统设计
2.1 系统总体结构
本文设计的起重机负载电机的状态监测系统包括状态数据信息采集单元、无线通讯传输单元和上位机LabVIEW监测平台三部分。系统总体结构如图1所示。
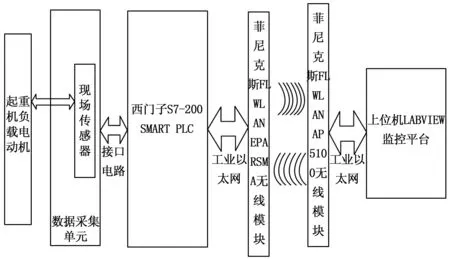
图1 系统总体结构框图
现场传感器采集起重机负载电机的各个状态信息,将采集的起重机负载电机的状态信息存储到西门子S7-200 SMART PLC设定的存储器中,PLC通过其工业以太网接口由菲尼克斯FL WLAN AP5100无线模块与FL WLAN EPA RSMA 无线模块以无线的方式将数据传输到上位机LabVIEW监测平台,上位机LabVIEW监测平台显示起重机负载电机的状态信息、故障信息以及信息的发布等。
2.2 监测系统硬件单元
2.2.1 起重机负载电机振动信号检测单元
本文采用无锡世敖科技有限公司生产的SA-CV-100速度传感器,SA-CV-100速度传感器为两线制一体化振动变送器,内置压电加速度型振动速度传感器。经过精密高的集成内置电路,将速度峰值或者有效值转换为标准型的0~5 V电压信号。
2.2.2 PLC现场控制和数据转换单元
本文选用SIEMENS公司S7-200 SMART型PLC,其CPU模块配有工业以太网端口进行,通过以太网接口与上位机进行通讯。PLC与现场检测站的各个检测传感器相连接,并且作为监测系统的现场控制站。本文上位机LabVIEW采用西门子提供的SMART ACCESS提供的OPC驱动和PLC进通信。选择S7-200 SMART型PLC扩展模块EM231作为模拟量采集模块,EM231模拟量输入单元有4路模拟量输入点,分辨率为12位A/D转换器。
2.2.3 工业Wi-Fi无线数据单元
本文选用由菲尼克斯公司生产的FL WLAN AP 5100无线网关与FL WLAN EPA RSMA 无线终端模块。菲尼克斯无线模块支持无线局域网802.11标准,FL WLAN AP 5100与FL WLAN EPA RSMA 无线模块支持工业以太网协议有线通信。可以通过基于Web的网络管理模式和简单网络管理协议对菲尼克斯无线模块进行配置。
2.3 监测系统软件单元
将菲尼克斯FL WLAN AP 5100无线模块和FL WLAN EPA RSMA无线模块通过有线以太网与上位机连接,进行无线模块的设置。
首先在上位机端将FL WLAN 5100的IP地址设置为192.168.0.254,点击Configuration即可进入设置界面。
在FL WLAN 5100设置为AccessPoint,并设置SSID名称,设置Wlan band 为2.4 GHz。在Client端与FL WLAN 5100相同设置,就可以进行无线通讯。
2.3.1 振动采集软件设计
振动PLC采集软件流程图如图2所示。
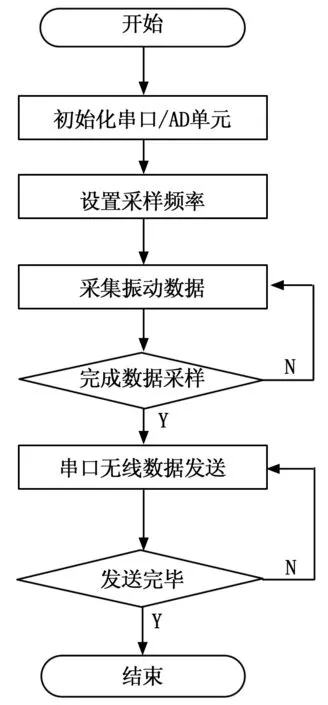
图2 振动采集单元流程框图
程序开始首先初始化PLC扫描时钟和输入接口。将振动传感器采集起重机核心机电设备电动机的振动数据信息保存于PLC相应地寄存器,然后通过PLC的工业以太网接口将数据传送给菲尼克斯FL WLAN EPA RSMA无线模块,菲尼克斯FL WLAN EPA RSMA无线模块通过无线方式将起重机核心机电设备电动机的振动数据传送给菲尼克斯FL WLAN AP 5100无线模块,菲尼克斯FL WLAN AP 5100无线模块与上位机LabVIEW通过串口连接,接收菲尼克斯FL WLAN AP 5100无线模块传送的电动机振动数据,并且分析处理数据和显示起重机电机的振动信息。
2.3.2 监控平台LabVIEW程序设计
为了方便用户查看起重机的状态信息,在上位机上使用LabVIEW软件编写了监控界面。起重机状态监测界面的功能主要包括:1)系统设置:包括时间的设定、各个串口通讯的设定、信号采样频率的设定、文件操作、命令控制等;2)实时数据:系统中各个传感器所采集到的各种数据、各个传感器的状态信息等;3)状态信息曲线:各个传感器采集数据波形的实时呈现、电动机不同状态的显示等;4)系统信息:存储并显示起重机状态的历史信息数据、进行的操作和软件信息;5)给用户提供使用方法的帮助信息, LabVIEW数据采集程序框图如图3所示。
通过上位机LabVIEW监测软件,可以监测到各个传感器的状态和传感器采集到的信息,还可以通过其他终端来访问后台的服务器[14-15],查看起重机核心机电设备的状态信息。
3 实验结果与分析
本实验主要完成以下内容:首先完成正常和典型故障振动信号检测;在上位机LabVIEW监测平台中完成振动信号的频谱相关性分析,最后完成上位机LabVIEW监测平台对起重机状态信息的发布。
3.1 振动信号的检测及分析处理
在起重机电机故障中,以滚动轴承的故障为最常见的故障。本实验以滚动轴承中最常见的故障是轴承外圈故障、轴承内环故障和滚子故障3种典型的故障作为研究对象[16]。在电机运行期间所采集3种故障振动数据。
在这本实验中测量垂直方向的振动信号在正常,在轴承外圈故障,轴承内部故障和滚子故障的每个状态中的原始振动信号图4所示,测定在一个恒定速度(500 rpm)。信号测量的采样频率是2 kHz,和采样时间是20 s。
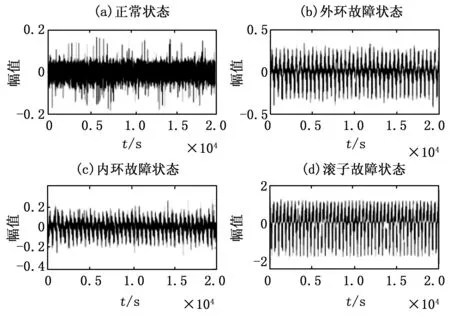
图4 4种状态的原始振动信号
3.2 振动信号频谱分析
通过FFT频谱方法分析各种状态下振动信号的时频分布,根据每个状态的频谱分布,得出每个状态的频谱特性,为故障诊断提供特征依据。电动机振动信号经过FFT变换到频率域中,将会得到更多的电机振动信号的详细信息[17]。
在滚动轴承发生故障时,故障部件振动信号频谱的出现在轴承的固有频率区域。图5给出在正常,轴承外圈故障,轴承内环故障和滚子故障的每个状态(本文给出转速500 rpm)所对应频谱特性曲线。
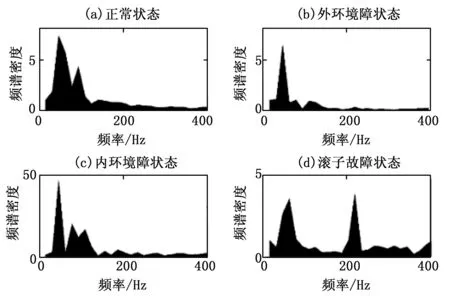
图5 每个状态FFT频谱图
从图5中,正常状态频谱集中在50 Hz领域;外环故障频谱集中在50 Hz和100 Hz领域;内环故障频谱集中在50 Hz、70 Hz和100 Hz领域;滚子故障频谱集中在50 Hz和200 Hz领域。故障状态频谱范围在60 Hz至200 Hz;即,如果轴承处于异常状态振动信号的频谱范围从约60 Hz至200 Hz,这些特征谱可以用于轴承的状态诊断。
3.3 基于相关性原理故障分析
根据振动信号FFT变换后的频谱特性为特征信号,将实时振动数据频谱信号和已知状态(正常,轴承外圈故障,轴承内环故障和滚子故障)频谱信号进行相关性运算,根据1.1节相关性理论得到实时信号与已知状态的相关系数,以相关系数为故障诊断判定阈值,进行故障诊断。
以轴承外圈故障为例,分析以相关系数为故障诊断判定阈值,进行故障诊断。图6为其中一组实时数据:
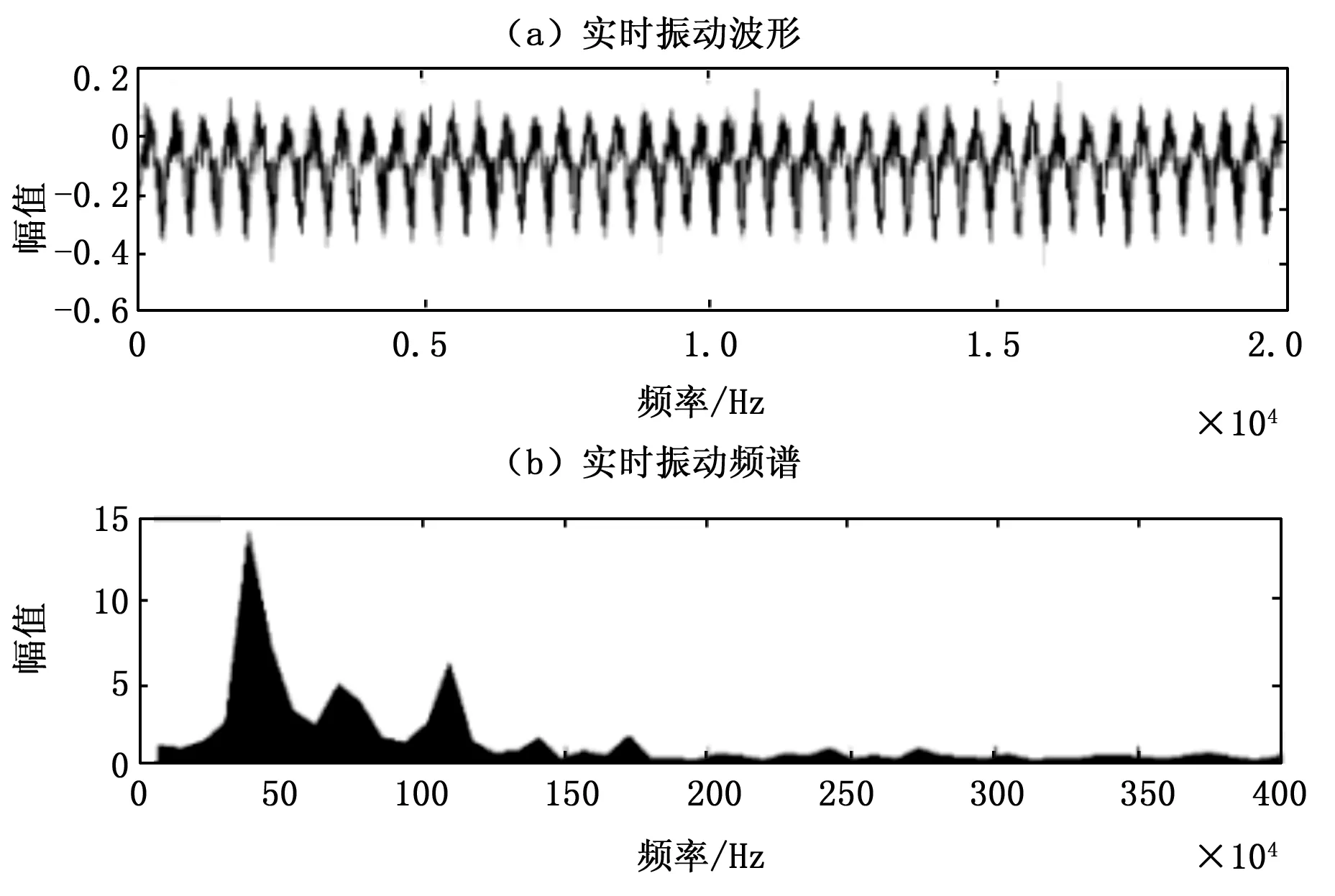
图6 实时数据(已知故障状态)
在电机转速在500 rpm平稳运行时,本文采集四十组实时故障数据(已知外环故障状态)作为故障诊断训练样本数据,进行阈值训练实验,确定所处故障状态的阈值范围。图7为轴承外圈故障与已知状态相关系数阈值分布。
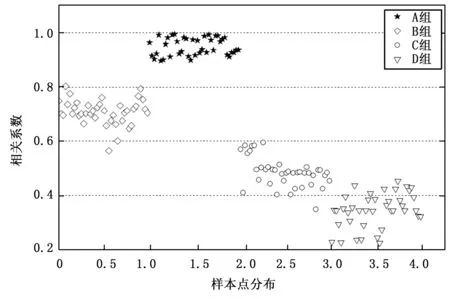
图7 训练故障数据、正常和故障状态相关系数分布
从图中可以看出,轴承外圈故障和其具有相同故障状态频谱相关系数分布在以0.948为中心的簇,相关系数范围在0.903~0.992区间。轴承外圈故障和其他状态的频谱相关系数分布也都有明显的差别,可以理解为都有各自簇中心,状态相关系数分布区分明显。其中图7中A组、B组、C组和D组是训练故障数据与外圈故障相关系数分布、正常状态相关系数分布、内环故障相关系数分布和滚子故障相关系数分布。A组、B组、C组和D组是四十组实时故障数据相关系数和相关系数中心点如表1所示。
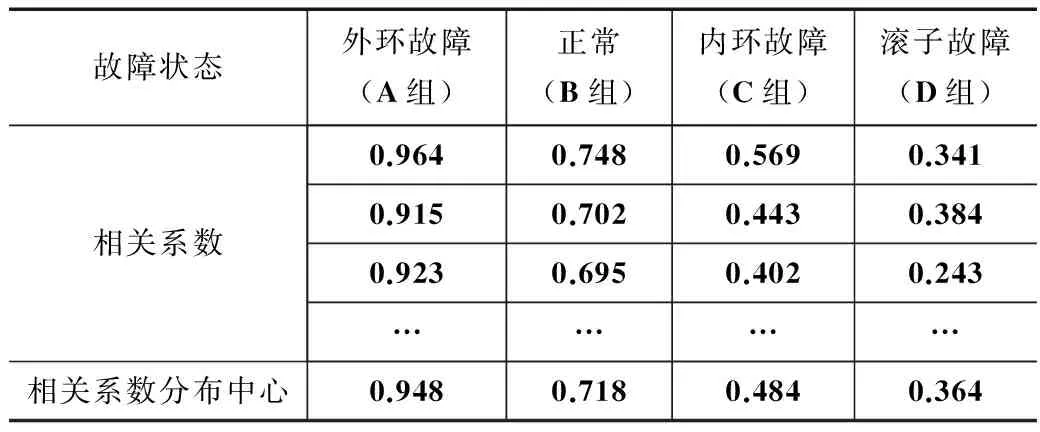
表1 A组、B组、C组和D组相关系数分布
本文选取十五组未经训练的实时故障数据(已知外圈故障状态)作为故障诊断训测试样本,检验采用振动频谱信号相关系数为故障诊断判定阈值,进行故障诊断的可行性和准确性。测试数据状态诊断结果如图8所示。
从图中可以看出,若以相关系数0.9为故障诊断阈值,则十四组测试结果为外圈故障状态;一组相关系数在小于0.8,诊断为其他状态,与已知测试为外圈故障状态相矛盾。可以得出测试结果正确率为95%。以相关系数0.9为故障诊断阈值,根据相关系数阈值分布与训练样本数据相关系数分布,可以诊断其他3种状态的正确率。如表2,为测试数据诊断结果的正确率:
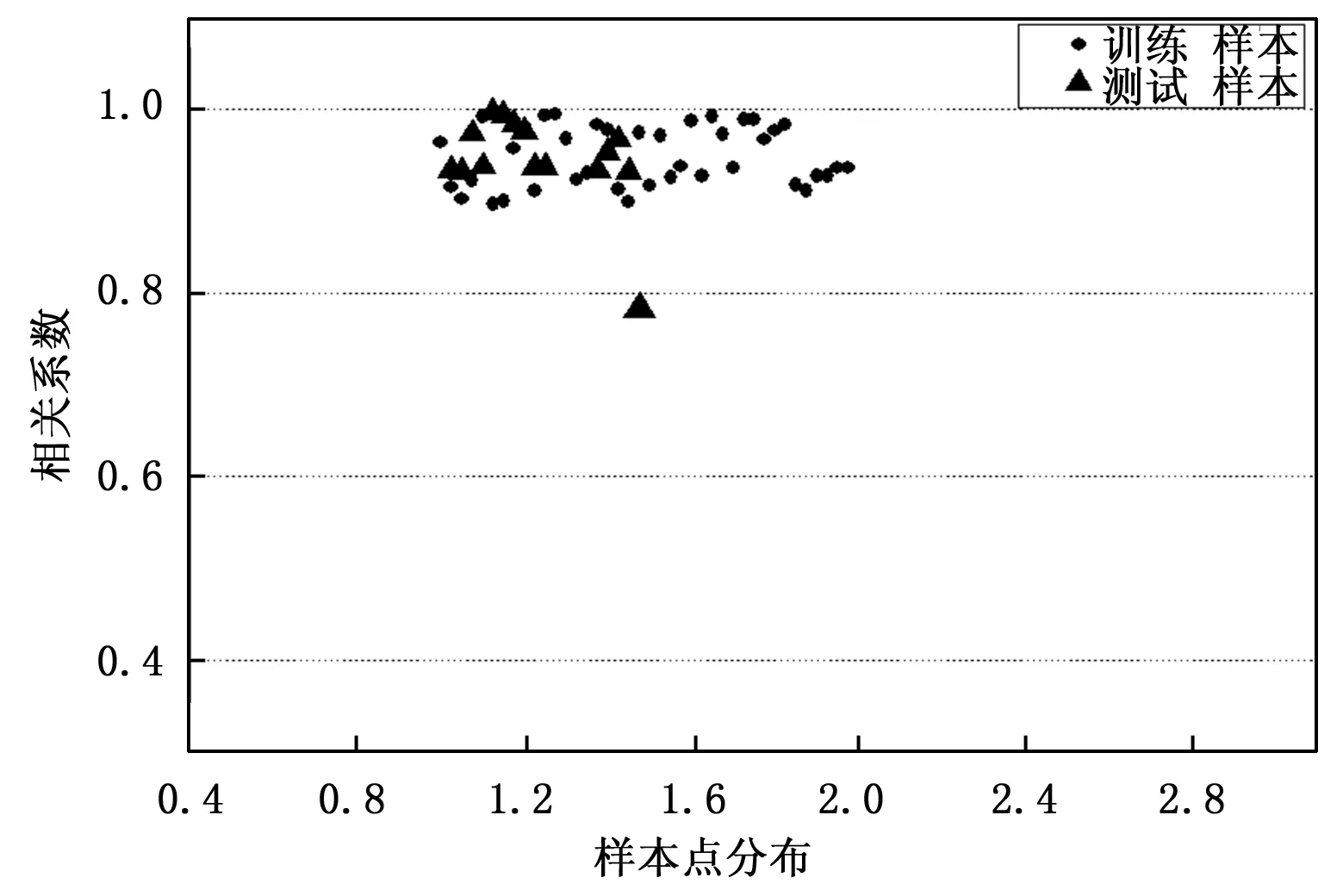
图8 测试数据状态诊断结果

故障状态正常外圈故障内环故障滚子故障正确率100%95%100%95%
由表2可以知,由本方法得到故障诊断正确率为97.5%,绝大部分故障状态都能够准确判断出来,可以采用相关系数作为故障诊断判定阈值,进行故障诊断。
4 结论
本文将频谱分析和相关性原理相结合应用于起重机的状态监测与故障诊断系统中,以工业无线形式将采集的信号量汇总到上位机LabVIEW监测中心,解决了起重机各部分可能出现故障分散,有线的方式进行信号汇集不便且不易扩展的问题。同时对起重机核心机电设备电动机的振动采集分析,分析起重机负载电机振动的谐波含量,并在上位机LabVIEW监测平台上完成信息数据的发布,实验验证了基于相关性原理的起重机负载电机机械震动信号无线远程监测系统检测方法的有效性,使得相关人员能方便及时的了解起重机系统的运行状态。为今后可以对更加复杂的状态参数和故障状态进行分析,并采用人工智能的算法进行故障分析和分类奠定基础。
[1] 石万祥, 周 强. 门机振动监测技术的探讨[J]. 港口装卸, 2002(3):19-20.
[2] 王国峰, 周亦武, 秦建春. 港口装卸机械动态监测系统的研究[J]. 测控技术, 2002, 21(9):36-38.
[3] Slutej A, Kolonic' F, Slutej A. Advances in Control and Sensors Technology Enabling Unmanned Operation of Containers Cranes[J]. EDPE 2005. Abstract and Proceedings Program. CD-ROM / Zvonko Bencˇic', 2005.
[4] 屈福政, 孙铁兵, 牛治刚,等. 大型起重机的智能化电子控制系统[J]. 起重运输机械, 2004(3):25-27.
[5] 张 健, 芮延年, 陈 洁. 基于人工神经网络理论起重机机械系统故障监测与诊断[J]. 机电一体化, 2005, 11(6):41-44.
[6] 王志欣, 胡 雄, 陈兆能. 集装箱起重机运行状态远程监测评估技术研究[J]. 武汉理工大学学报, 2006, 28(4):101-104.
[7] 王凤萍, 程 磊, 孙 影. 国内外履带式起重机的现状及发展趋势[J]. 工程机械, 2006, 37(4):39-43.
[8] 王小明, 卢志强. 国内外大型起重机的研究现状及发展趋势[J]. 机电产品开发与创新, 2009, 22(2):6-7.
[9] 张 华, 张志胜, 伏明明,等. 设备远程监控系统的设计与实现[J]. 中国制造业信息化, 2008, 37(13):46-48.
[10] 王 超. 起重机行业发展综述[J]. 工程建设, 2011, 43(5):50-53.
[11] 杨海滨. 大型履带式起重机远程状态监测系统智能终端的设计与实现[D]. 上海:上海交通大学, 2008.
[12] Lv X L, Li J. Fault diagnosis and self-restore fault-tolerant control for systems with state delays[A]. 2009 Chinese Control and Decision Conference[C]. Guilin, 2009, 902-907.
[13] 李帅毅. 门座起重机振动监测系统研究[J]. 港口装卸, 2013(3):18-20.
[14] 闫淑娟. 基于LabVIEW的振动信号测试分析系统的研究[D]. 沈阳:东北大学, 2009.
[15] 曾素琼,黄华杰. 基于单片机和LabVIEW的无线火灾监测系统设计[J]. 计算机测量与控制,2015,23(1):43-45.
[16] Li K, Chen P, Wang H. Intelligent Diagnosis Method for Rotating Machinery Using Wavelet Transform and Ant Colony Optimization[J]. IEEE Sensors Journal, 2012, 12(7):2474-2484.
[17] 李 婷, 卢卯旺, 龙诗颐. 电机振动的频谱分析[J]. 湖南科技学院学报, 2005, 26(11):39-41.
Crane Load Monitoring System Design Based on Principle of Correlation
Lü Jinlong,Huang Xixia, Wu Xiaoyue
(Ministerial Key Laboratory of Marine Technology and Control Engineering, Shanghai Maritime University,Shanghai 201306, China)
This paper proposes the use of Siemens S7-200 Smart PLC to collect mechanical vibration signals of rolling bearings for the crane load motor by Phoenix industrial Wi-Fi wireless module to send the collected data in the form of wireless packet data summary to the PC monitoring center. The correlation and spectrum analysis of the motor vibration signal are carried out by the LabVIEW monitoring platform of the host computer. The real-time vibration data spectrum signal and three typical fault state spectrum signals of known common bearing outer ring failure, inner ring fault and roller failure are carried out by correlation method. The correlation coefficient is used as the fault diagnosis threshold to diagnose the fault, and the state of the crane is monitored and the information of the monitoring is released.
crane; condition monitoring; industrial wireless; correlation; fault diagnosis
2017-01-06;
2017-02-06。
国家自然科学基金(51209134)。
吕金龙(1991-),男,安徽太和人,硕士研究生,主要从事检测技术及自动化装置方向的研究。
黄细霞(1975-),女,副教授,上海人,硕士研究生导师,主要从事港航电力传动与控制、电力电子集成系统建模与控制方向的研究。
1671-4598(2017)07-0043-04
10.16526/j.cnki.11-4762/tp.2017.07.011
TP277
A
