基于模糊-PI双模控制的两相伺服电动机速度控制系统
2017-08-08陈广浩吴开源
陈广浩,吴开源,曾 敏
(华南理工大学 机械与汽车工程学院,广东 广州510641)
基于模糊-PI双模控制的两相伺服电动机速度控制系统
陈广浩,吴开源,曾 敏
(华南理工大学 机械与汽车工程学院,广东 广州510641)
本文提出了一种两相伺服电动机模糊-PI双模速度控制系统的设计。其主要思想在输入信号之后,设置了一个带阈值E模态转换器,根据阈值E与电动机转速误差e的比较结果确定其模态:当电动机转速误差e大于阈值E时,运行其模糊控制器,以获得良好的动态性能,当电动机转速误差e小于阈值E时,运行其PI控制器,以获得良好的稳态性能。MATLAB/Simulink仿真结果表明,模糊-PI双模控制相比传统模糊控制和常规PID控制在两相伺服电动机速度控制中可以获得更好的动态性能和稳态性能,且具有很好的鲁棒性。
模糊PI双模控制;两相伺服电动机;速度控制
两相伺服电动机(Two-phase Servo Motor)具有调速范围宽、机械特性和调节特性为线性、无“自转”现象和动态响应快等特点,具有广阔的发展前景[1-2]。PID控制具有算法简单,鲁棒性好及可靠性高等特点,但是对于非线性、大滞后、强耦合、高精度等控制场合,PID不能获得满意的控制效果[3]。
在这种情况下,运用模糊控制是一种较好的选择,特别是在两相伺服电动机中[4],模糊控制可以把专家的经验转换成控制系统的模糊集合,利用模糊推理规则,这些模糊集合能够对系统的输出进行智能调节[5],但是模糊控制器有自身的缺点:当模糊控制器的输入为电动机转速误差和电动机转速误差变化率,输出为控制电动机电枢电压变量时,它本质上相当于一种非线性PD控制,系统响应快,超调小,但是缺少积分控制项,不能保证系统输出的稳态性能。
针对此缺点,本文结合两相伺服电动机的数学模型特点,提出了一种模糊-PI双模控制同时具有PID控制的稳态性能,又具有模糊控制的动态性能,在实际应用中,起到良好的控制效果。
1 两相伺服电动机的数学模型速度控制模型
控制两相伺服电机电磁转矩和速度的方法有两种:1)改变电枢电压Ua即改变电枢电流Ia的方法;2)改变励磁电流If即改变磁通Φ的方法。
1.1 两相伺服电动机数学模型
文中采用的是两相伺服电动机改变电枢电压的数学模型。
当改变电动机电枢电压时,两相伺服电动机动态过渡过程的微分方程为[1]:

其中:τm为电机的机电时间常数;τe为电机的电气时间常数,KΩ为电机的速度常数;Ω为转子机械角速度;Ua为电枢电压。
对式(1)进行拉普拉斯变换,此时的传递函数为:

两相伺服电动机传递函数由方程式(2)得到,由于电路中电枢绕组电感很小,所以电气时间常数τe很小,可以忽略不计。如果τe忽略,则传递函数可以降低次数简化为[6-7]:

为了保证工程实际需要,两相伺服电动机主要用于航空航天飞行器等控制系统,必须满足最大百分比超调为δp%≤8.5%,稳态误差为ess≤0.8以及调节时间ts≤2 s,那么固定内部参数后,被控对象两相伺服电动机传递函数简化为:

1.2 两相伺服电动机常规PID控制
两相伺服电动机常规PID控制系统结构图如下:
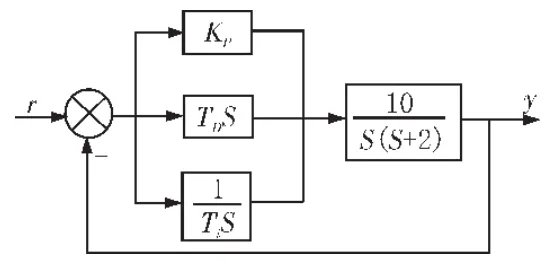
图1 两相伺服电动机常规PID结构图
利用实验法确定两相伺服电动机转速系统(TPSM)PID控制器各参数,为了获得较好的稳态控制效果,对PID参数进行整定,得到PID控制器的参数为:kp=10;Ti=10;Td=4.5。
加入PID控制器后TPSM系统,系统输入为r(t)=5+4t响应曲线如下:
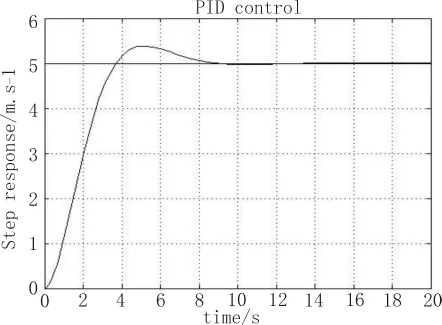
图2 常规PID控制阶跃响应曲线图
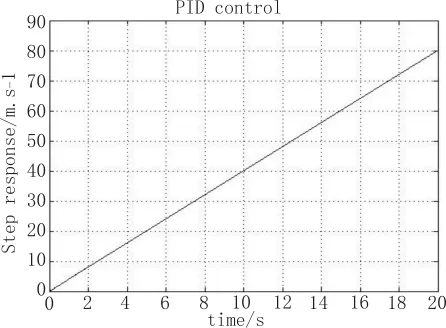
图3 常规PID控制速度响应曲线图
由常规PID控制阶跃响应曲线可知,系统动态响应超调量大,上升时间过长,过渡过程时间较长,所以系统的动态控制性能不容易得到保证TPSM系统大多数用在工业过程控制和运动控制中,要求保证良好的动态性能和稳态性能,又因为PID参数整定,是根据人为经验确定的,所以无法满足PID控制器的各参数在线实时修正要求,且工业过程中,大多数场合存在不同程度地非线性、大滞后、参数时变性和被控对象的不确定性,基于上述原因,笔者提出一种模糊-PI双模控制新算法以提高PID控制器的动态特性及稳态性能,模糊控制不要求被控对象的精确模型且适应性强,能够克服PID控制器的缺点,可以将模糊控制器与PI控制器结合起来构成复合控制器,模糊-PI双模控制同时具备PID控制的稳态性能和模糊控制的动态性能,且鲁棒性好,抗干扰性强,起到了良好的控制效果。
2 模糊-PI双模控制系统设计
文中对保证动态性能和静态性能的模糊-PI双模控制器进行了设计,模糊-PI双模控制系统由电动机转速误差和电动机转速误差变化率的等级划分器、模糊控制器(F控制器)和PI控制器并联而成,并由控制开关进行模式选择,其模糊-PI双模控制两相伺服电动机系统结构图如图4所示。
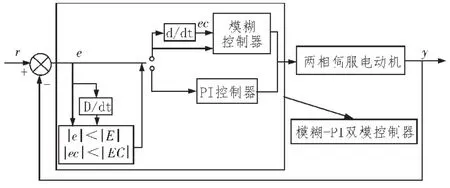
图4 模糊-PI双模控制两相伺服电动机系统结构图
3 模糊-PI双模控制原理
模糊-PI双模控制器的工作原理是通过等级划分器,可以判断电动机转速误差和电动机转速误差变化率的控制系统状态的等级,设定等级划分器某个阀值和,本文有三个等级划分器。第一个等级划分器是当电动机转速误差较大时即|e|大于等于阈值|E|时,就采用模糊控制以获得良好的动态性能;第二个等级划分器是当电动机转速误差变化率较大时即|ec|大于等于阈值|EC|时,就采用模糊控制以获得良好的动态性能;第三个等级划分器是当电动机转速误差偏小,且电动机转速误差变化率偏小时即|e|小于|E|,且|ec|小于|EC|时就采用PI控制以获得良好的稳态性能。
控制开关的推理规则如下所示:
IF|e|≥|E|THEN模糊控制器运
IF|ec|≥|EC|THEN模糊控制器运行
IF|e|<|E|AND|ec|<|EC|THEN PI控制器运行
4 模糊逻辑实现
在本文设计的模糊控制器中,输入模糊变量为电动机转速误差和电动机转速误差变化率,输出模糊变量为电动机电枢电压u。输入变量e、ec和输出变量u被标幺化到论域[-6,6],模糊变量e有8个模糊语言值,分别为:NB,NM,NS,NO,PO,PS,PM,PB。模糊变量ec和u有7个模糊语言值,分别为:NB,NM,NS,NO,PO,PS,PM,PB。各变量隶属度函数如图5、图6、图7所示。图中模糊集的交叉部分为保证相邻控制输出之间的平滑切换
综上所述,由控制的需要,可以得到两相伺服电动机模糊规则控制表如表1所示。
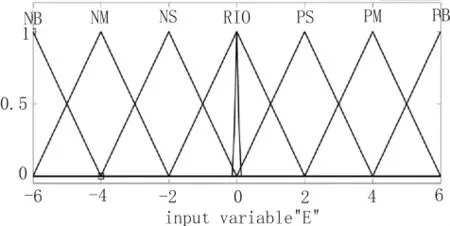
图5 E隶属度函数图
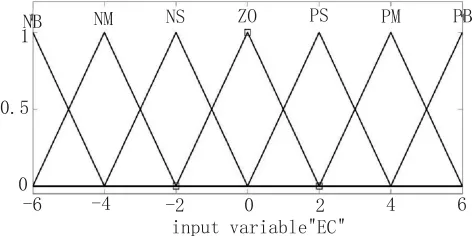
图6 EC隶属度函数图
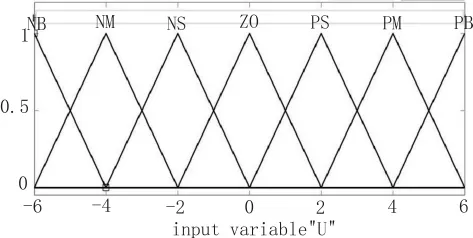
图7 U隶属度函数图
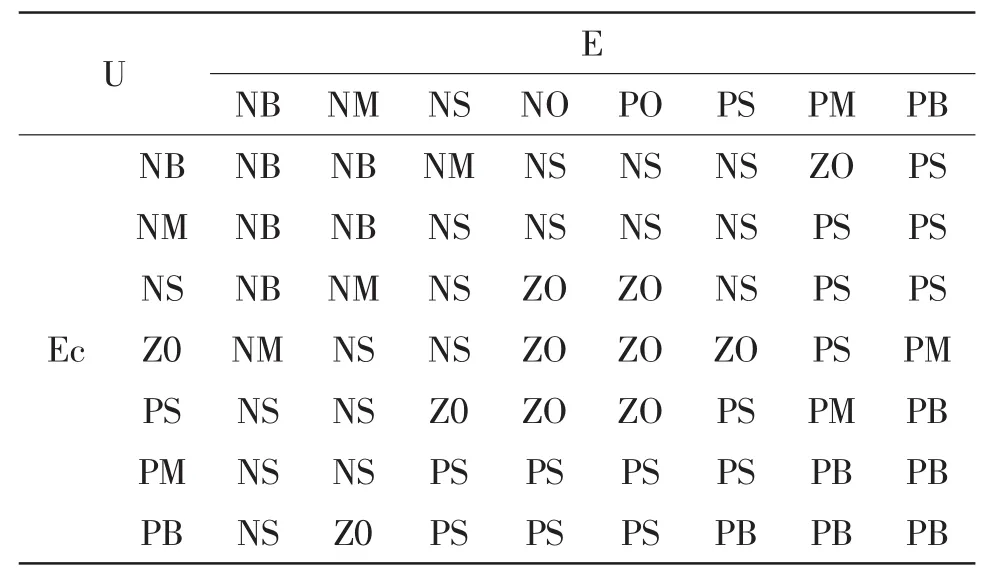
表1 模糊-PI双模控制器的模糊规则表
5 系统仿真
为了分析本文提出的模糊-PI双模控制系统的控制效果,在MATLAB/simulink中建立两相伺服电动机模糊-PI双模控制仿真系统,如图8所示。
同时,对常规PID控制器、传统模糊控制器以及本文设计的模糊-PI双模控制器进行实验比较。图9为TPSM速度控制的实验曲线,曲线在MATLAB/simulink完成,给定阶跃响应为5 r/s,并且在加入干扰信号。可以看出PID控制器可以使系统的稳态误差为零,有着较强的抗干扰能力,但响应较慢,超调量较大;模糊控制器具有较好的动态性能,上升时间短,超调量小,但稳态精度不能得到保证;而笔者提出的模糊-PI双模控制器则同时具有较强的抗干扰能力、更高的动态性能和稳态性能,结合了PID控制器和模糊控制器的优点,消除了盲区。
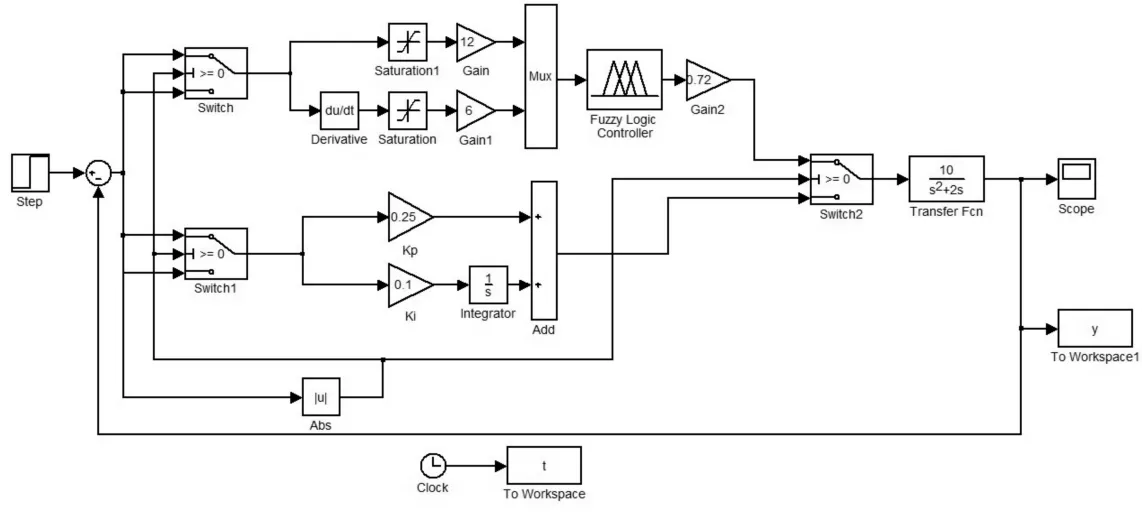
图8 模糊-PI双模控制器Simulink仿真图
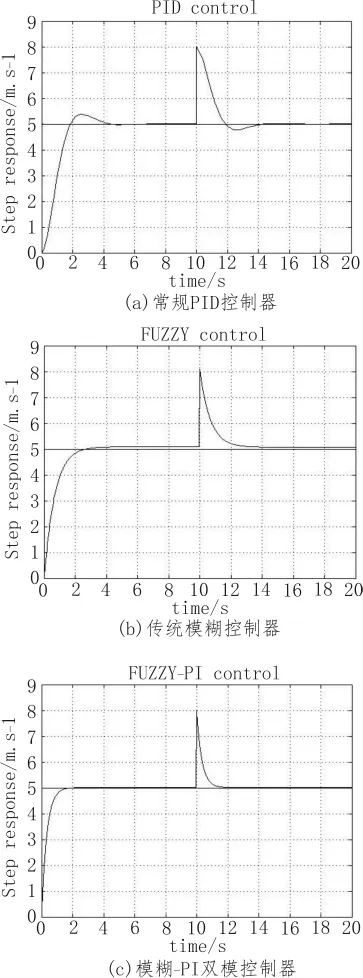
图9 两相伺服电动机速度响应的仿真结果
6 结 论
文中设计了一种模糊-PI双模控制器并把它应用于两相伺服电动机的控制中。当电动机转速偏差较大时,采用模糊控制以获得良好的动态性能;当电动机转速偏差较小时,采用PI控制器以获得良好的稳态性能。通过MATLAB/Simulink环境下的仿真实验结果表明,与常规PID控制器和模糊控制器相比,模糊-PI双模控制器能很好地解决上升时间长,超调量大,调节时间长、稳态精度差等缺点,在系统的快速性、稳定性以及准确性方面都有较大的改善,并且具有很好的鲁棒性,模糊-PI双模控制可以获得较高的稳态性能和动态性能。
[1]Hossain M J,Pota H R,Ugrinovskii V A,et al.Voltage mode stabilisation in power systems with dynamic loads [J].International Journal of Electrical Power&Energy Systems,2010,32(9):911-920.
[2]阮阳,袁荣湘,万黎,等.同步发电机的非线性鲁棒电压控制[J].电工技术学报,2012,27(9):9-16.
[3]兰洲,甘德强,倪以信,等.电力系统非线性鲁棒自适应分散励磁控制设计[J].中国电机工程学报,2006,31(13):33-39.
[4]古丽扎提.海拉提,王杰.广义 Hamilton多机电力系统的广域时滞阻尼控制[J].中国电机工程学报,2014,34(34):6199-6208.
[5]Ghasemi A,Shayeghi H,Alkhatib H.Robust design of multimachine power system stabilizers using fuzzy gravitationalsearch algorithm [J].International Journal of Electrical Power&Energy Systems,2013(51):190-200.
[6]伍家驹,王祖安,刘斌,等.单相不控整流器直流侧LC滤波器的四维可视化设计[J].中国电机工程学报,2011,31(36):53-61.
[7]安芳,伍家驹.LC滤波的单相不控整流浪涌电流的计算方法[J].电源技术应用,2013:64-66.
[8]Calvo-Rolle J L,Quintian-Pardo H,Corchado E,et al.Simplified method based on an intelligent model to obtain the extinction angle of the current for a single-phase half wave controlled rectifier with resistive and inductive load[J].Journal of Applied Logic,2015,13(1):37-47.
[9]廖勇,甄帅,刘刃,等.用谐波注入抑制永磁同步电机转矩脉动[J].中国电机工程学报,2012,31(21):119-127.
[10]Jang Y,Jovanovi M M.Three-phase three-level soft-switched PFC rectifiers:US,US20130235626 A1[P].2014.
[11]Jung S Y,JINSEOK H,KWANGHEE N A M.Current Minimizing Torque Control of the IPMSM Using Ferrari's Method[J].IEEE Transactions on Power Electronics,2013,28(12):5603-5617.
[12]朱昊,肖曦,李永东.永磁同步电机转矩预测控制的磁链控制算法[J].中国电机工程学报,2010(21):86-90.
[13]Tallam R M,Naik R,Gasperi M L,et al.Practical issues in the design of active rectifiers for AC drives with reduced DC-link capacitance[C]//Industry Applications Conference,2003.38th IAS Annual Meeting.Conference Record of the.IEEE,2003:1538-1545 vol.3.
[14]Zhao P,Yao W,Wen J,et al.Improved synergetic excitation control for transient stability enhancement and voltage regulation of power systems[J].International Journal of Electrical Power&Energy Systems,2015(68):44-51.
[15]阮阳,袁荣湘.采用输出反馈方式的电力系统非线性励磁控制 [J].中国电机工程学报,2011,31(34):68-76.
The rotation speed control of two-phase servo motor based on fuzzy-PI dual-mode
CHEN Guang-hao,WU Kai-yuan,ZENG Min
(School of Mechanical and Automotive Engineering,South China University of Technology,Guangzhou 510641,China)
A design of the rotation speed control of two-phase servo motor based on the fuzzy-PI dualmode is proposed.The idea is that if an E-mode converter with threshold value behind the input signals is set up,the controller modal can be defined according to the comparison between the threshold value E and the motor rotation speed error e.When the motor rotation speed error e is the greater than the threshold value E,the fuzzy controller will be utilized to gain a good dynamical performance of control system.On the contrary,the PI controller will be used to gain a good steady-state performance.The computer simulation result shows that the fuzzy-PI dual-mode controller have the better dynamic performance and steady-state performance compared to that of fuzzy controller and PID controller for rotation speed control of two-phase servo motor.
Fuzzy PI dual-mode;two-phase servo motor; rotation speed control
TN62
:A
:1674-6236(2017)14-0078-04
2016-05-17稿件编号:201605164
陈广浩(1994—),男,广东湛江人,硕士研究生。研究方向:电动汽车,动力电池等。