基于旋量代数的机器人运动学建模及应用
2017-07-25耿明超刘丽娟张灿果王嫣嫣
耿明超 刘丽娟 张灿果 王嫣嫣 刘 爱
(1.河北建筑工程学院,河北 张家口 075000;2.张家口高新盛华热力有限公司,河北 张家口 75000)
基于旋量代数的机器人运动学建模及应用
耿明超1刘丽娟1张灿果1王嫣嫣1刘 爱2
(1.河北建筑工程学院,河北 张家口 075000;2.张家口高新盛华热力有限公司,河北 张家口 75000)
传统的加速度用两个三维矢量分别表示刚体的转动和移动,运动学及后续的动力学建模过程复杂且极易出错,不能满足构型复杂机器人的建模需求.而旋量将刚体的转动和移动统一为一个整体,能够简化刚体运动的表示形式.基于旋量代数的运动学建模方法,形式简洁、物理意义明确,为机器人的动力学模型、驱动优化及控制精度等问题的研究提供了理论基础.
旋量代数;机器人;运动学;加速度
随着全球制造业的转型升级,机器人产业迅猛发展.智能、超常成为机器人新的发展趋势,机器人的构型更加复杂,尺寸极大(极小),负载更大,精度更高,速度更快,这对机器人的建模及分析理论提出了更高的要求.机器人的运动学研究操作空间与关节空间之间的位置、速度及加速度之间的关系,是机器人轨迹规划、动力学分析及精确控制的基础.
在传统的表示方法中,加速度用两个三维矢量分别表示刚体的转动和移动,被割裂的转动和移动部分分别推导,过程复杂且极易出错[1].而旋量将刚体的转动部分和移动部分统一为一个整体,能够简化刚体运动的表示形式,兼备几何直观性与代数抽象性.Ball[2]在其著作中指出,刚体的瞬时运动可以用旋量表示.Mises[3]定义了旋量的叉积,并指出旋量的叉积能够用来衡量旋量的变化特性.Karger等[4]揭示了旋量代数与李群、李代数的关联性,使人们认识到旋量是射影李代数元素,速度旋量是李代数se(3)的元素,而力旋量是对偶李代数se*(3)的元素.这使得两个不同的理论相互丰富、共同发展.戴建生研究了旋量代数与机构学的内在联系,并以此为工具对变胞机构等进行分析[5].旋量代数和李群/李代数在运动学方面的研究及应用仍比较分散,不够系统.
本文给出一套推导过程简洁,物理意义明确的机器人(尤其是构型复杂的并联机器人)运动学建模方法,并以应用广泛的6-RUS并联机器人为例验证上述建模方法.
1 刚体的旋量加速度
刚体对a点的旋量速度定义为:Va=(ωoa;νoa,其对时间的导数为:
(1)
其中,Aa为刚体的旋量加速度;ωoa、εoa分别为刚体的角速度、角加速度;νoa、αoa分别为刚体上质心点a的速度、加速度.需要读者注意的是,点a相对于固定坐标系是运动的,是时间的函数.刚体相对于坐标原点o的旋量速度、加速度表示为V0、A0.将旋量从a点迁移到o点,旋量速度、加速度的方向不变,其对偶部分可表示为:
(2)
为了简化表示,后续部分将刚体对于坐标原点o的旋量速度、加速度的右上角标忽略.
2 机器人运动学建模
2.1 串联分支的运动学Hessian矩阵

(3)
(4)
其中,

2.2 并联机器人的运动学Hessian矩阵

(5)

(6)

(7)
同理,机器人其它分支的主动关节的加速度都可以得到.将所有分支主动关节的加速度合成表示成一个矩阵的形式
(8)

(9)

(10)

3 数值算例
6-RUS并联机器人如图1所示,其动、定平台由6个RUS分支相连(R表示转动副,U表示万向节,S表示球副),转动副为驱动副.机器人的结构参数如下:动、定平台铰链点分布圆的直径分别为0.6 m、1.0 m;动、定平台相近铰链点的夹角分别为12.6°、38.1°;上、下连杆的长度分别为lbc=0.5 m.lac=0.3 m;动、定平台的初始高度为0.5 m.
在动平台上建立动系p-xyz,基座上建立定系o-xyz.bio(i=1,2,…6)为上铰链点在p-xyz中的表示,bi、ai,(i=1,2,…6)则是上、下铰链点在定系o-xyz中的表示.ni是转动副轴线的单位矢量,可以通过铰链点的布置形式得到.上铰链点在定系中的表示如下bi=Ropbio+pop.其中,Rop是动系相对于定系的旋转矩阵,pop是动系相对于定系的位置矢量.中间铰链点ci的位置满足如下约束方程:|bi-ci|=lbc,|ai-ci|=lac,(ai-ci)ni=0.其中,第三个方程式通过下连杆和转动副轴线垂直得到的.求解约束方程组就可以得到中间铰链点ci的坐标.

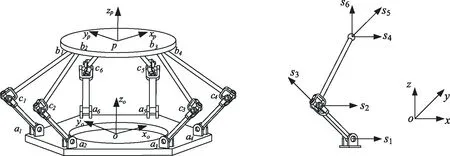
图1 6-RUS并联机器人机构简图 图2 RUS分支运动旋量
采用X-Y-Z欧拉角来描述机器人动平台的姿态,给定其运动规律如下:θx(t)=0.1745×sin(5t)rad,θy(t)=0.1745×sin(3t)rad.图3(a)是根据论文第2部分的公式计算得到的,而图3(b)则是采用Adams软件仿真得到的.通过比较可知,图3(a)和图3(b)的结果一致,验证了论文中所提出的建模方法的正确性.
4 结 论
基于旋量代数,建立了串联分支及并联机器人的运动学模型,形式简洁紧凑,物理意义明确,适合于计算机编程,为后续动力学模型、驱动优化及控制精度等问题的研究提供了理论基础.

(a)理论计算结果 (b)Adams软件仿真结果
图3 6-RUS并联机器人驱动关节加速度
[1]洪嘉振.计算多体系统动力学[M].北京:高等教育出版社,1999
[2]Ball R S.A Treatise on the Theory of Screws[M].Cambridge:Cambridge University Press,1900:45~60
[3]Mises R V.Motorrechnung,ein neues Hilfsmittel der Mechanik[J].Journal of Applied Mathematics and Mechanics/Zeitschrift für Angewandte Mathematik und Mechanik,1924,4(2):155~181
[4]Karger A,Novák J,Basch M.Space Kinematics and Lie Groups[M].New York:Gordon and Breach Science Publishers,1985:78~102
[5]戴建生.旋量代数与李群、李代数[M].北京:高等教育出版社,2014
Robot Kinematics Modeling and Application Based on Screw Algebra
GENGMing-chao1,LIULi-juan1,ZHANGCan-guo1,WANGYan-yan1,LIUAi2
(1.Hebei University of Architecture,Zhangjiakou China,075000;2.Zhangjiakou Shenghua Heating Power Co.Ltd,Zhangjiakou China,075000)
Traditional acceleration represents the movement and rotation of rigid body with two three-dimensional vectors respectively,and the kinematics and the subsequent dynamics modeling process is complex and error-prone,which cannot meet the modeling requirements of the robot with complex configuration.The screw acceleration unites rotation and moving of rigid body as a whole,which simplifies the representation of a rigid body motion.The kinematics modeling method is concise in form and clear in physical meaning,which provides a theoretical basis for the research of dynamic model,drive optimization and controlling accuracy of robot.
screw algebra;robot;kinematics;acceleration
2016-12-02
河北省高等学校青年拔尖人才计划项目(BJ2016017)、张家口市科技计划项目(1621009B,1521007B)和河北建筑工程学院博士科研启动基金项目(B-201603)
耿明超(1984-),男,讲师,主要研究方向为并联机器人技术及其应用.
10.3969/j.issn.1008-4185.2017.02.028
TH 132.41
A
