基于室内照明区域人员定位的探讨*
2017-06-19陶陶,汪胜
陶 陶, 汪 胜
(安徽工业大学 计算机科学与技术学院,安徽 马鞍山 243000)
基于室内照明区域人员定位的探讨*
陶 陶, 汪 胜
(安徽工业大学 计算机科学与技术学院,安徽 马鞍山 243000)
首先根据照明灯的照明光路构建照明模型确定定位区域并且建立定位向量,然后通过对室内照明灯场景的分析,将定位场景分为三大类,在第一类和第二类中分别采用定位向量的方法实现目标的区域定位,在第三类中采用常见的三边定位方法实现对目标的定位,最后针对实际环境对实验结果产生的误差,尝试采用线性最小二乘法精确计算方法进一步优化定位结果。
照明区域;定位区域;定位向量;线性最小二乘法
1 定位模型的建立
1.1 照明灯的照明模型
照明灯的照明亮度随着与照明灯距离的增大而不断减小,通常只有在距离照明灯较近的某一区域的亮度能够满足人员对照明的需求。为了确定能够满足照明需求的照明区域,系统根据照明灯的照明光路,构建照明灯的照明模型。室内照明灯距离地面有一定高度,以照明灯为顶点,照明灯的照明区域为圆锥形,取照明灯在竖直方向坐标为圆心,一定距离为半径画圆,所得到的圆为照明的照明区域,将区域确定为一个定位区域,如图1所示。
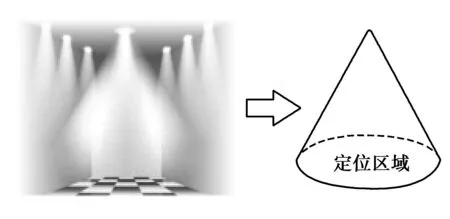
图1 照明灯照明模型Fig.1 Lighting model of lamp
1.2 定位向量的建立
在校内通常每个学生都有一张校园IC卡,每张卡都有唯一识别号,系统中目标标签也有唯一识别号存储在标签内的芯片中,记为Tg,Tg作为定位向量中的第1个参数;目标标签从进入阅读器工作区域到离开阅读器工作区域这段时间内,在不同的时刻会产生标签识别号和阅读器识别号相同,但时间戳不同的多组定位向量,将时间戳记为t作为定位向量的第2个参数;当目标标签进入阅读器工作区域时,阅读器检测到目标标签的时刻记为阅读器的设置与标签类似每个阅读器都有唯一识别号记为Rd作为定位向量的第3个参数;阅读器读取到目标标签的R值,系统计算出R值与阅读器处R值之间的差值,记为ΔR,ΔR作为定位向量的第4个参数[4]。因此将定位向量记为〈Tg,t,Rd,ΔR〉。
2 区域定位场景分析
在室内,根据空间布局的需要通常照明灯的安置存在多种情况,如单道走廊、走廊拐角处、楼道、室内大厅等场所照明灯的安置情况不同,没有单一的布局规律。因此将定位场景分为三类,第一类为1个标签1个阅读器;第二类为1个标签2个阅读器;第三类为1个标签3个或者3个以上阅读器。针对不同的场景类别,采用不同的定位方法,在第一类和第二类中采用定位向量的方法实现定位,在第三类中采用三边定位算法实现定位[5]。
2.1 1个标签1个阅读器
如图2所示,R1是阅读器,圆形区域是阅读器工作区域即照明灯的照明区域,图2中曲线是标签T1经过阅读器工作区域的移动轨迹,t1、t2分别指标签T1进入和离开某个阅读器工作区域的某一时刻。
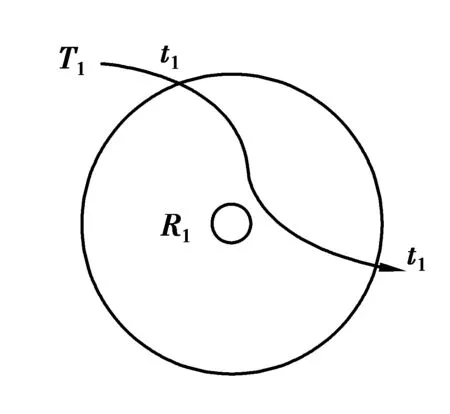
图2 1个标签1个阅读器Fig.2 A label for a reader
在图2中是1个标签经过1个阅读器工作区域,从t1时刻进入到t2时刻离开,在这段时间内阅读器R1始终能够检测到标签T1,随着时间的推移后台服务器收集到多组标签识别号和阅读器识别号相同、信号强度差值不同的定位向量:
后台服务器在处理多组定位向量时,只判断阅读器与信号强度两个参数,每个阅读器对应一个信号强度差值ΔR,服务器根据定位向量产生时间的先后逐个处理每个定位向量,首先读取第2个参数,确定阅读器后调取阅读器数据库中存储的ΔR与第1个定位向量中的ΔR1进行比较,当ΔR大于ΔR1时服务器下达指令点亮R1阅读器处照明灯,再与第2个定位向量中的ΔR2比较,若ΔR大于ΔR2服务器不再下达指令直接处理第3个定位向量,整个过程一直持续到在第i组定位向量中ΔRi大于ΔR时服务器下达照明灯熄灭指令。
2.2 1个标签2个阅读器

图3 一个标签两个阅读器Fig.3 A label for two readers
如图3所示,R1、R2是阅读器,圆形区域是阅读器工作区域即照明灯的照明区域,图3中曲线是标签T1经过阅读器工作区域的移动轨迹,t1、t2、t3、t4分别指标签T1进入或离开某个阅读器工作区域的某一时刻。
在图3中是1个标签经过有重叠工作区域的两个阅读器,在t1时刻到t2时刻和t3时刻到t4时刻标签分别在R1和R22个阅读器工作区域移动,后台服务器处理过程与图2中原理相同。在t2时刻到t3时刻内,标签在R1和R2两个阅读器重叠的工作区域移动,阅读器R1和R2均感知到标签,并产生多组标签识别号相同、阅读器识别号不同、时间戳相同、ΔR不同的定位向量:
在处理定位向量时,系统首先根据第2个参数即阅读器识别号将收集到的定位向量分成两组:
R1组:
R2组:
为了避免在重叠区域两阅读器处照明灯同时点亮造成资源浪费,在图3中用虚线将重叠区域分成两部分,然后系统将两组定位向量中的标签识别号和时间戳同时相同的定位向量的第4个参数ΔR进行比较,最后处理ΔR较小的定位向量,理论上标签在虚线左边阅读器R1处照明灯点亮,在虚线右边阅读器R2处照明灯点亮,但实验发现存在着一定数量的实验误差[6,7]。
2.3 1个标签3个或以上阅读器
如图4中所示,R1、R2、R3为阅读器,圆形区域为其工作区域,虚线为目标标签的移动轨迹。标签经过R1和R3独立区域时,定位处理方式同一个阅读器1个标签相同;当标签经过R1和R2以及R2和R3两阅读器公共工作区域时,定位处理方式同两个阅读器1个标签相同;当标签在R1、R2和R33个共同区域时,采用常见的三边定位法对标签进行定位。另外,当3个以上阅读器同时检测到目标标签时,依据RSSI定位模型,取3个R值最强的阅读器,依旧采用3边定位算法对目标进行定位[8]。

图4 1个标签3个阅读器Fig.4 A label for three readers
值得一提的是当2个或2个以上标签经过阅读器工作区域时,阅读器感知到各个目标标签,产生阅读器识别号相同、标签识别号不同、时间戳相同以及ΔR不同的多组定位向量,如有2个标签T1和T2在R1阅读器工作区域出现,系统收集到多组定位向量:
此时若仍然分组处理定位向量必然会有冗余定位向量,影响系统运行效率,因此要采取过滤算法将多余的定位向量过滤掉,减少系统运算时间。系统检测各个定位向量的第2个参数与第3个参数,当出现若干个定位向量的第2个参数和第3个参数同时相同时,将其中任一定位向量定为冗余定位向量并将其过滤,只处理其中一个定位向量。在上述有两个标签T1和T2同时出现在R1阅读器工作区域时,系统对收集到的定位向量进行过滤,剩余的定位向量如下:
即当两个或者多个标签同时在阅读器工作区域移动时,系统对收集到的定位向量进行判断,若两个或者多个定位向量的时间戳和阅读器同时相同时,采用过滤算法过滤掉冗余的定位向量,减少运行时间[9]。
3 基于线性最小二乘估计的误差优化
实验的误差主要来自采集信号强度值时外界噪音对其大小的影响,为了保证对目标节点的定位精度,除了依据ΔR值对目标节点区域定位以外,根据RSSI定位模型,采用数学方法对目标节点进行进一步的坐标定位,以此来减小实验误差,提高定位精度[10]。
目标节点进入阅读器工作区域后系统检测到目标节点信号发射信号强度值,根据无线信号RSSI的定位模型,采用以非线性优化函数为基础的定位计算方法,将非线性优化函数转化为线性最小二乘估计问题,通过计算将定位坐标以代数解的形式得出,然后通过两点坐标的距离计算公式进一步计算目标节点与阅读器的距离,判断目标节点是否在阅读器工作区域,减小外界噪音对实验带来的实验误差。
由RSSI定位模型[11]可得节点间RSSI信号强度Pi与相对距离的关系式:
pi=p0-10βlgdi+εi
(1)

(2)
其中i=1,2,...,N,利用泰勒级数对式(2)的右边进行展开,忽略高阶项,由此式(2)变换为
(3)

(4)
其中i=1,2,...,N,令z=[xyx2+y2]T,将式(4)改写为线性矩阵形式为

(5)

依据线性最小二乘平方原理,参数z的无偏估计值为
(6)

(7)
其中i=1,2,...,N。
假设参数z的估计误差为Δz,其值为
(8)
估计误差Δz的方差为
(9)
从参数z提取出z(1∶ 2)即为被定位目标节点坐标[11]。
4 结束语
针对当前高校室内照明灯的应用现状,基于现有的照明系统,引入了物联网室内定位技术。通过对照明区域的场景分析和设计,实现目标的区域定位,并针对实际环境所带来的实验误差,对区域定位结果进行进一步优化,实现目标在室内照明区域的准确定位,最后依据目标位置信息,来控制照明灯的开启与关闭,从而达到节能减排的应用效果。
[1] 王刚,米欣.关于当前高校节能管理的几点思考[J].节能,2016,35(7):11-13
WANG G,MI X.Several Ideas for Energy Conseriation Managment in Colleges and Universities[J].Energy,2016,35 (7):11-13
[2] 祝正元,徐昌庆,刘乾晨,等.基于差分信号强度的指纹室内定位算法[J].信息技术,2014,38(8):96-99
ZHU Z Y,XU C Q,LIU Q C.Fingerprint Indoor Localization Algorithm Based on Differential Signal Strength [J].Information Technology,2014,38 (8):96-99[3] ZHONG P L,LIU L J.Bayesian Optimization RSSI and Indoor location Algorithm of Iterative Least Square[J].International Journal of Smart Home,2015,9(6)31-42[4] HE B.Method and Server for Collecting Radio Fingerprint Posi-tioning Data: U S, 9119085[P].2015-8-25
[5] 李军怀,贾金朋,王怀军,等.基于信号强度差的 RFID 室内定位研究[J].计算机科学,2015,42(11):154-157
LI J H,JIA J P,WANG H J.RFID Indoor Localization Based on Poor Signal Strength[J].Computer Science,2015,42 (11):154-157[6] ZHANG K Q.An Area State-aided Indoor Localization Algor-ithm and Its Implementation.[C]∥Communication Workshop (ICCW),2015 IEEE International Conference on,2015:1102-1110
[7] LI A G,LIU S S.RSSI Assisted in Distance-scale Mapping Positioning Algorithm.[C]∥Wireless Communication and Network:Proceedings of 2015 International Workshop on Wireless Communication and Network (IWWCN2015),2015:1719-1724
[8] 陈舒娅.模块化机器人移动定位系统的应用和研究[J].现代电子技术,2015,38(24):40-43
CHEN S Y.Application and Research of Mobile Positioning System Based on Modular Robot[J].Modern Electronic Technology,2015,38 (24):40-43
[9] CHEN G F.Dynamic Base Station Selection Strategies Based on Location Fingerprinting.[C]∥Antennas and Propag-ation(APCAP),2015 IEEE 4th Asia-Pacific Conference on,2015:1001-1010
[10] 李梦含,夏小超.函数带误差的部分线性模型约束下的统计推断[J].重庆工商大学学报(自然科学版),2015,32(7):5-15
LI M H,XIA X C.Statistical Inference for the Partial Linear Model with Error Function [J].Journal of Chong-qing Technology and Business University(Natural Science Edition),2015,32 (7):5-15[11] 蔡朝晖,夏溪,胡波,等.室内信号强度指纹定位算法改进[J].计算机科学,2014,41(11):178-181
CAI C H,XIA X,HU B,et al.Indoor Signal Intensity Fingerprint Localization Algorithm for Improvemen[J].Computer Science,2014,41 (11):178-181
[12] 袁鑫,吴晓平,王国英.线性最小二乘法的 RSSI 定位精确计算方法[J].传感技术学报,2015,28(10):1412-1417
YUAN X,WU X P,WANG G Y.Linear Least Square Method of Rssi Positioning Accuracy Calculation Method[J].Journal of Sensing Technology,2015,28(10):1412-1417
责任编辑:田 静
�现的基本思路是在室内照明灯处安置阅读器并采集标签在阅读器处接收的信号强度指示(
Signal Strength Indication,RSSI),记为R值,然后采集标签在距离阅读器一定距离处的R值,将这两者的差值记为ΔR录入数据库[2]。当携带有标签的人员进入阅读器工作区域,阅读器感知到标签并检测到标签所在位置的R值,系统计算R值与标签在阅读器处R值之间的差值并与数据库中ΔR比较,若产生的差值小于ΔR则系统发送指令点亮照明灯,从而达到照明的目的;随着人员的走动,标签与阅读器两者的距离不断增大,阅读器接收到标签反射回来的R值越来越小,故而与标签在阅读器处的R值的差值越来越大,当差值大于ΔR时,系统发送指令熄灭照明灯,到此整个照明过程结束[3]。
Discussion on Personnel Position in Indoor Lighting Area
TAO Tao, WANG Sheng
(School of Computer Science and Technology, Anhui University of Technology, Anhui Maanshan 243000, China)
The positioning area is firstly determined according to the constructed lighting model based on the lighting lamp light path, and positioning vector is built. The analysis of indoor lighting lamp scene classifies the positioning scene into three classes, the regional position of the target is realized by respectively using positioning vector method in the first class and the second class, and the target position is achieved in the third class by using common three edge position method. Finally, the positioning results are further optimized by using precise calculation method of linear least square according to the deviation produced in experiments in actual environment.
lighting area; positioning area; positioning vector; linear least square method
10.16055/j.issn.1672-058X.2017.0003.016
2016-10-09;
2016-11-10. * 基金项目:国家自然科学基金(61402009);赛尔网络下一代互联网技术创新项目(NGII20150617);安徽工业大学研究生创新研究基金(2015073).
陶陶(1977-),男,安徽无为人,副教授,博士,从事物联网技术、无线传感网络研究.
TP391.7
A
1672-058X(2017)03-0088-05
高校校园教学楼和宿舍楼常见到两种场景:一是教室或者办公室的照明灯在只有少数人员时仍然全部点亮;二是走廊或者楼道的照明灯通常是声控照明灯或者光控照明灯,声音过大时某一区域的照明灯全部点亮或者天黑会引起走廊内光控照明灯全部点亮直到天亮。两种场景中,在无人或者有少数人员的情况下照明灯全部点亮必然会导致电力资源的浪费。为此,在现有照明系统的基础上引入物联网的室内定位技术[1],根据人员位置准确点亮局部照明灯达到最大化校园用电节能。
