基于Pro/E翻盖机构设计与仿真分析
2017-05-30李镇山
李镇山
摘要:针对垃圾箱脚踩翻盖机构的设计要求,基于Pro/Engineer参数化自顶而下设计方法完成翻盖联动机构设计;应用Mechanism功能对该机构进行了运动学分析、动态分析和静态分析,应用Pro/Mechanica功能进行了整机有限元分析,验证了该机构的性能和可实用性。
关键词:机构设计;运动分析;Pro/E;Pro/Mechanism;Pro/Mechanica
Pro/Engineer软件是美国PTC旗下CAD/CAM/CAE一体化的三维软件,该软件以参数化著称,在目前的三维设计软件领域中占有着重要地位。Pro/Mechanism是Pro/Engineer的运动分析模块,可实现机构的运动仿真、运动学分析、动态分析、静态分析和力平衡分析等。Pro/Mechanica Structure是集静态、动态结构分析于一体的有限元模块,能够模拟真实环境为模型施加约束及载荷,测算模型的应力、应变和位移等参数,实现静态、模态和振动等多种分析,对模型进行评估、研究和优化。
1基于Pro/Engineer参数化自顶而下设计
自顶向下设计(Top-Down)是从一个系统的角度,计划所有设计过程的一种先进的产品设计方法。Pro/ENGINEER软件提供了完整的Top-Down设计方案,在产品开发时按照其功能要求在考虑产品各组件及零件之间的约束和定位关系的基础上先定义顶层的骨架,在完成顶层设计之后,再进行单个零件的详细设计。Pro/Engineer自顶向下设计有着产品顶层设计意图的集中控制、父子关系的A型传递、整体产品的开发易于管理、便于实施和推进协同工作及有效的探索设计变更等优点,最大限度地减少设计阶段不必要的重复工作,有利于提高工作效率。
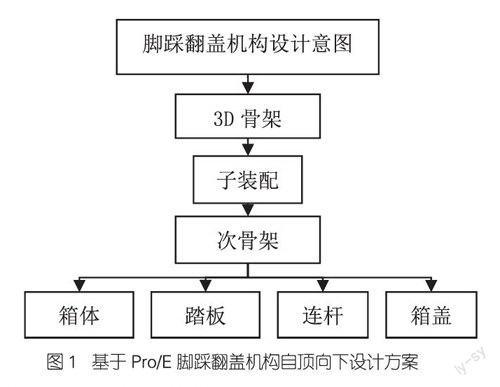
1.1翻盖机构自顶而下设计方案
根据Pro/E自上而下设计方法进而构建脚踩翻盖机构自顶而下设计方案,如图1所示:
1.2翻盖机构自顶而下设计实施
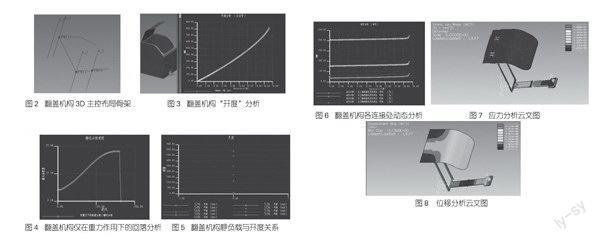
垃圾箱容积为0.3m3,设计一种脚踩翻盖机构,开度要求大于700mm,且开门结构能实现随开随闭。根据垃圾箱脚踩翻盖机构的设计意图进而构建翻盖机构3D主控布局骨架,如图2所示,图中A1轴所表示的是将杆件1通过固定铰支座与箱体连接,A4轴所表示的是将翻盖通过固定铰支座与箱体连接,A3轴所表示的是将杆件2与翻盖铰接,A2轴所表示的是将杆件2与杆件1铰接,进而构成了翻盖机构3D主骨架,保存为.Prt元件。
在Pro/E-ASM环境下将3D主控布局骨架与新建Rep.Prt元件进行装配,进而应用元件操作中的合并功能传递3D主控布局骨架参数到Rep.Prt元件中;在Rep.Prt元件中通过几何复制、图元拾取和参照等功能得到各零件次骨架,再由次骨架分别生成各零件,从而完成了从主控骨架到各个零件参数的传递。
通过上述的翻盖机构自顶而下设计,当翻盖机构的设计参数发生变更时,其设计参数的变化就会通过翻盖机构3D主控布局骨架参数的变化传递给上述各主要部件,致使所有部件都会进行设计变更,进而适应了机构设计中的频繁变更设计参数的情况,并有效地提高了从机构到整机设计的效率,同时为机构优化设计奠定了基础。
2基于Pro/Mechanism翻盖机构的运动分析
Pro/Mechanism可进行机构的运动学分析和仿真,能够很好地简化机构设计开发过程和缩短开发周期,减少开发成本。
2.1机构创建
在Pro/E-ASM环境下将各零件进行元件间相互关系的连接,进而完成机构运动中自由度的约束。Pro/E所提供多种连接方式,可根据实际连接情况进行元件间的连接,此翻盖机构的四处实际连接均为“销钉”连接,但在Pro/Mechanism系统计算中会出现冗余,需要选择适当的连接类型,在不影响真实连接情况的基础上控制模型中的冗余,这里采用“球”点一点对齐连接替换“销钉”连接,实现真实连接情况的同时又释放了两个自由度,达到了消除冗余的目的。
2.2机构仿真分析
在Pro/E-ASM环境下选择“应用程序”-“机构”进入Mechanism工作环境。
(1)通过设定A1连接处旋转轴的“零点位置”、“最小限制值”和“最大限制值”的方法限定杆件1(即踏板)在一个合理角度区间运动。
(2)设定伺服电机(1deg/sec),选取A1连接处旋转轴为伺服电机运动轴。
(3)设定初始条件为翻盖机构闭合状态。
(4)设定负载。
(5)翻盖机构“开度”分析:
新建分析设定类型为“运动学”,初始状态为翻盖机构闭合状态下的“快照”,终止时间为旋转轴的“最大限制值”;新建测量设定为“位置”,选定开度测量点和坐标系,根据选定的坐标系指定测量分量,完成该机构的“开度”分析。
在不发生机构干涉的情况下,通过运动学分析方法测得翻盖机构的最大开度为818mm,如图3所示:
(6)翻盖机构仅在重力作用下的回落分析:
新建分析设定类型为“静态”,初始状态为翻盖机构最大开度状态下的“快照”,外部负载“启用重力”。翻盖机构仅在重力作用下的回落分析如图4所示。通过静态分析可知,该机构仅在重力作用下即可完成箱盖的自动关闭。
(7)翻盖机构静负载与开度关系的分析:
在考虑重力的作用下翻盖机构踏板所受力与开度的关系如图5所示。通过分析可知,翻盖(材料为铝镁锰合金板)的初始开合力为53N,达到700mm开合度的开合力约为58N,达到最大开合度近818mm的开合力为60N,符合人机工程学要求。
(8)翻盖机构动态分析:
在考虑重力的作用下翻盖机构踏板处受60N力各连接处作用反力动态分析如图6所示,分析结果为进一步对连接处销轴强度校核奠定基础。
基于Pro/Mechanism翻盖机构的运动分析结果可知,该机构最大开度为818mm,满足开合度大于700mm的设计要求;初始开合力为53N,最大开合度开合力为60N,符合人机工程学要求;翻盖机构仅在重力中用下即可完成关闭,实现了随开随闭的功能。
3基于Pro/Mechanica翻盖机构的有限元分析
Pro/Mechanica主要包括Structure和Thermal两个模块,其中Pro/Mechanica Structure用来进行零件和组件模式下的结构分析,其分析种类有静态分析、模态分析、屈曲分析、接触分析预应力分析和振动分析等,通过指定设计参数,能够在给出变化范围内进行灵敏度分析,并借助优化分析为模型寻找到最佳参数。
基于Pro/Mechanica结构有限元分析的一般步骤:模型简化-进入结构分析环境-定义材料属性-(增加理想化模型)-施加约束、载荷-建立分析-运行分析-获取结果。
翻盖机构在踏板处受60N力作用下,整机应力分析如图7所示、位移分析如图8所示,根据结果判断结構设计情况,进而再进行修改和优化。
4结语
本文基于Pro/Engineer软件通过自顶而下设计方法完成了翻盖机构设计,并应用Pro/Mechanica/Mechanism功能进行了翻盖机构的运动分析和有限元分析,达到了预期设计要求,体现出了Pro/Engineer软件在整机机构设计中的功用,极大地缩短了产品的开发周期,提高了产品市场竞争力。
