棉花打顶机械手的Fuzzy—PID控制
2017-05-02宋欢王维新李霞沈晓晨张玉磊��
宋欢+王维新+李霞+沈晓晨+张玉磊+��
摘要:针对棉花打顶的农艺作业要求设计了基于Fuzzy-PID控制的机械手,对此打顶机械手先进行了整体硬件系统的结构设计,然后详细介绍了控制系统的主要组成。依据设置在各关节的传感采集中心划分并确定模糊变量,通过Matlab制定了适合棉花打顶的独特模糊PID规则,从而建立了Fuzzy-PID控制系统。最后运用Simulink对棉花打顶机械手的数学模型进行模块搭建,调取Fuzzy-PID规则且导入到控制模块,进而对Fuzzy-PID控制模块进行仿真和分析,说明打顶机械手Fuzzy-PID控制的优势,为构建打顶机械手试验平台提供可行保障。
关键词:棉花;打顶机械手;Fuzzy-PID;模糊变量;Matlab;Simulink仿真
中图分类号: S224.9文献标志码: A
文章编号:1002-1302(2017)03-0172-04
收稿日期:2015-12-14
基金项目:国家自然科学基金(编号:51405312)。
作者简介:宋欢(1991—),男,河南许昌人,硕士研究生,主要从事机电控制。E-mail:1254058254@qq.com。
通信作者:李霞,博士,副教授,主要從事机械设计及其自动化研究,E-mail:lixia0415@163.com。
新疆是全国最大的棉花生产区,作为新疆的支柱产业,棉花的丰产不仅对新疆经济影响十分显著,还对整个国家经济的发展有着重要影响[1]。打顶是采收棉花之前的重要环节,在棉花生产全程机械化过程中,从耕地到施肥、除草、播种、定苗、化防、灌溉、棉花采收各环节已基本实现机械化,但棉花打顶机械化滞后。面对如此之多的工作量,单靠人工打顶不仅延误最佳的棉花生长结铃期,还耗费众多的劳动力与成本,手工打顶已无法满足大面积棉花生产全程机械化的需求,严重制约了棉花产量的增长。近年来,随着棉花打顶机的逐渐普及,一定程度上减轻了劳动负担,但其暴露的缺点也愈加突出,如通过性差;人工升降控制装置使得调节高度精度和即时性差[2];现有机具不能实现单体棉花植株的随即仿形,打顶机工作中出现了漏打、撞铃、撞桃、损坏棉叶的现象。所以,为了适应自动化程度较高的棉花打顶作业要求,解决打顶过程中出现的各种问题,须要对整机的打顶执行系统进行根本性设计,才能解决大面积打顶困难的问题。
基于上述情况,本研究研制了一种以模糊PID控制器为核心的棉花打顶机械手,根据棉田的普遍种植模式和单体仿形的农艺要求,选取了适合打顶的五自由度关节型机械手,结合光电编码器的信息采集反馈环节,基于ARM处理器实现对机械手的整体闭环控制,依靠Matlab软件建模和仿真分析,采用模糊PID控制算法对输出信号进行处理,使关节运动平滑稳定,同时提高了电机转角精度,降低了系统误差[3],使得单体打顶变得简单可行,工作效率大大提高。
1棉花打顶机械手的硬件结构
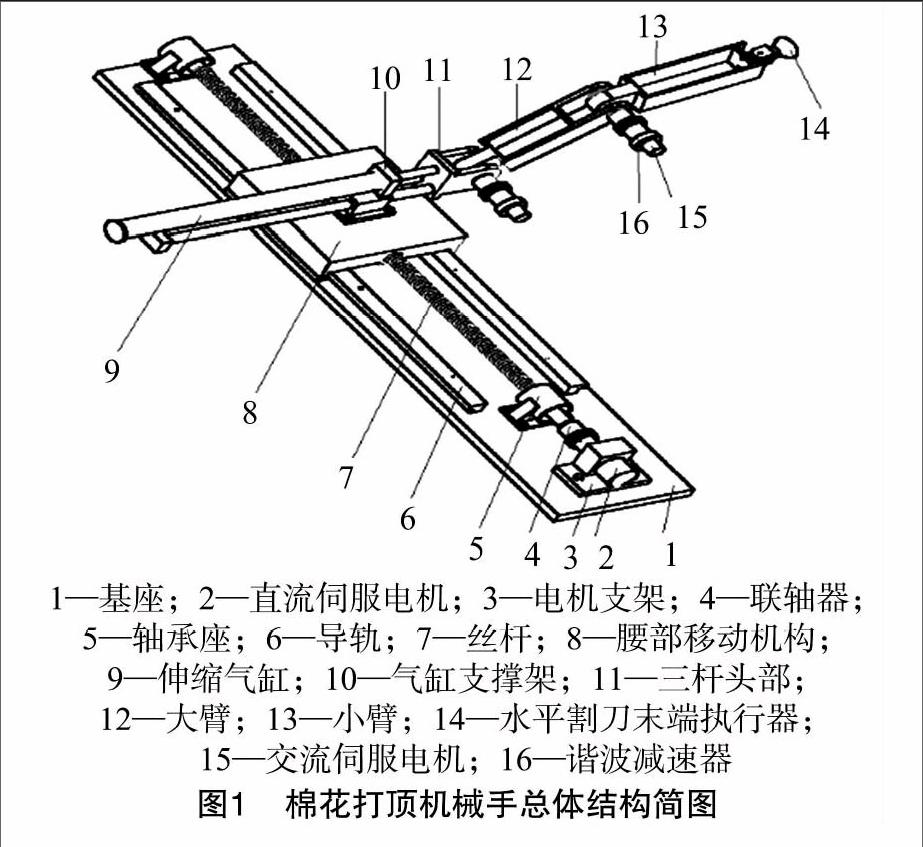
该打顶机械手为5个自由度机械手,总体上由基座、腰部移动机构、伸缩机构、机械臂和末端执行器等模块组成。基座安装固定在移动平台上;腰部移动机构采用丝杠滑块传动结构,丝杠的转动采用直流伺服电机作为驱动源,丝杠转动带动滑块移动;伸缩机构采用伸缩气缸结构;机械手的手臂连接移动平台和腕部,将运动传递到末端,以确定末端执行器的空间位置。为适应复杂、多变及非结构的棉花采摘环境,选用水平割刀作为机械手的末端执行器。
该打顶机械手按工作原理可以分为五大部分,分别是执行机构、驱动机构、控制系统、反馈装置与传感检测系统。其中执行机构总体上由基座、腰部移动机构、伸缩机构、机械臂和末端执行器等模块构成,主要用来执行棉花打顶的作业要求,通过水平割刀快速旋转将棉顶切掉;驱动机构是给打顶机械手提供动力的装置,分别设置在腰部、大臂、小臂和末端刀具等各部件相接的关节处,接受处理器给定的指令进而控制相应电机运转;控制系统负责整个系统的运转,发出控制信号完成打顶机械手控制系统的系统初始化、任务分配、代码的编译和生成指令以及系统状态检测等功能[4]。棉花打顶机械手总体结构如图1所示。
反馈装置主要是利用安装在机械手机身上的气动组件来获取机械手的状态信息,然后经过数据处理之后,进行实时监控。
[JP2]传感检测系统主要是检测打顶机械手执行机构的运动状态以及角度位置,能随时将执行系统的实际位置信号反馈给控制系统,并与设定好的位置信号进行比较,然后通过控制系统进行调整,使执行系统在一定的范围内达到设定的精度[5]。[JP]
[WTHZ]2Fuzzy-PID控制器的设计
由于棉花打顶系统属于大滞后、非线性复杂工业对象,采用传统的PID控制稳态响应特性较好,但难以得到满意的动态特性。模糊控制虽然对被控对象的时滞性、非线性和时变性有一定的反应能力,但由于量化等级所限制,稳态精度达不到要求。而Fuzzy-PID控制结合了以上2种算法的优点,既能保证较好的动态特性和稳态性[6],也能对非确定的对象数学模型的系统有很强的适应性,具有鲁棒性好、算法简洁等优点,因此本研究利用模糊控制和传统PID控制相结合[7]。
2.1控制器的变量划分
模糊PID控制把经典的PID控制与先进的专家系统相结合,实现系统的最佳控制。通过找出PID 3个参数与误差E和误差的变化率EC之间的模糊关系,实现系统的控制,适用于系统对动态特性要求不高,而对控制精度要求较高的工况。
本研究利用各关节的编码器输出脉冲测量机械手的旋转角度,定义此变量为控制量误差E,则将旋转角度的物理变化率即角速度设定为控制量误差的变化率EC,通过不断检测E和EC,根据模糊控制原理对3个参数进行在线修改,以满足不同E和EC对控制参数不同的要求,使被控对象有良好的动态、静态特性。该系统在打顶机械手位置偏差较大时采用Fuzzy控制,较小时采用PID控制。模糊推理过程为2输入3输出的系统[8]。2个输入分别为系统误差E和误差的变化率EC,输出为PID的3个控制参数Kp、Ki和Kd。运用模糊控制规则自动实现对PID控制参数在线修改。
2.2打顶机械手控制器的设计
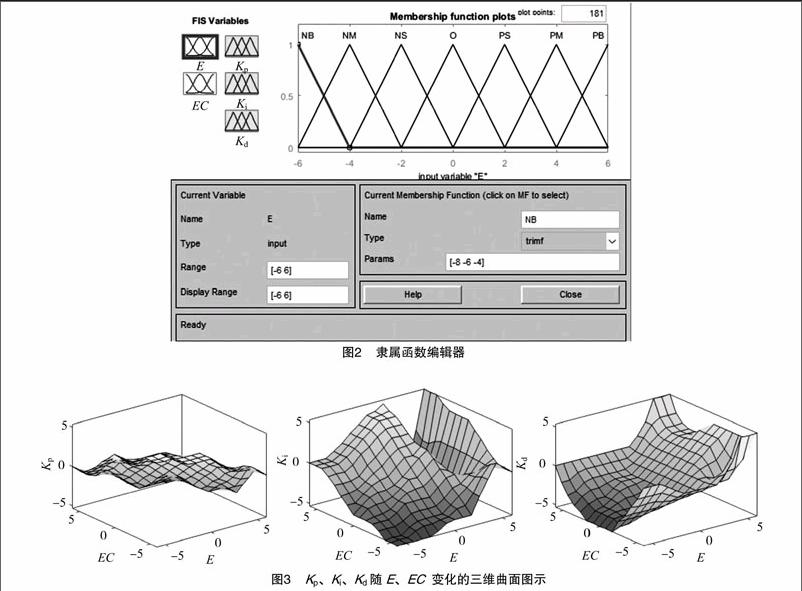
Fuzzy-PID的参数整定分初始化参数整定和在线整定。首先确定误差E和误差变化率EC为模糊语言变量,在其论域上分别定义7个模糊子集,记为{NB,NM,NS,O,PS,PM,PB},分属于模糊集合{负大,负中,负小,零,正小,正中,正大},隶属函数选择互相对称且交叠连续的线性三角形[9]。设E、EC和Kp、Ki、Kd的论域都为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}。采用Mamdani型控制推理方法[10]建立模糊控制规则。
隶属度的特点是评价结果不是绝对地肯定或否定,而是以1个模糊集合来表示。通过应用Matlab软件中的Fuzzy工具箱,将建立好的2输入3输出变量编译到Fuzzy工具箱的隶属度函数编辑器中,这里选择每个变量的类型为三角形函数,其中论域设为[-6,6],并且设置每个参数的语言变量为NB、NM、NS、O、PS、PM、PB(图2)。隶属度越接近于1,表示x的程度越高,越接近于表示程度越低。
编写好隶属度函数,还须要将控制各输入输出之间的关系用特定语言编写出来。依据打顶机械手的模糊控制规则,在该Rule Editor窗口中共编入147条简单指令。
2.3打顶机械手Fuzzy-PID观察
将编好的FIS规则编辑器命名为“打顶模糊指令”以方便查找,并保存为可以调用的.fis文件,紧接着就是查看编制好的Fuzzy-PID观察器,该观察器简单地将2输入的变化情況以三角形的时域形式表示出来,并模拟出Kp、Ki、Kd紧随E、EC的响应图形。
在Matlab环境中,调用模糊控制器中的曲面观测器,每个三维坐标图中都是误差E和误差的变化率的直观形象显示,打开曲面观察器,观察3个输出语言变量的控制曲面,参数[CM(25]Kp、Ki、Kd的控制曲面如图3所示,控制曲面都为非线性,通过对PID的3个参数进行调校,有效建立起Fuzzy-PID控制系统[11]。
[WTHZ]3Simulink仿真
为了验证Fuzzy-PID算法的效果,运用Matlab仿真软件Simulink和Fuzzy工具箱对打顶机械手的模糊算法进行仿真研究[12]。
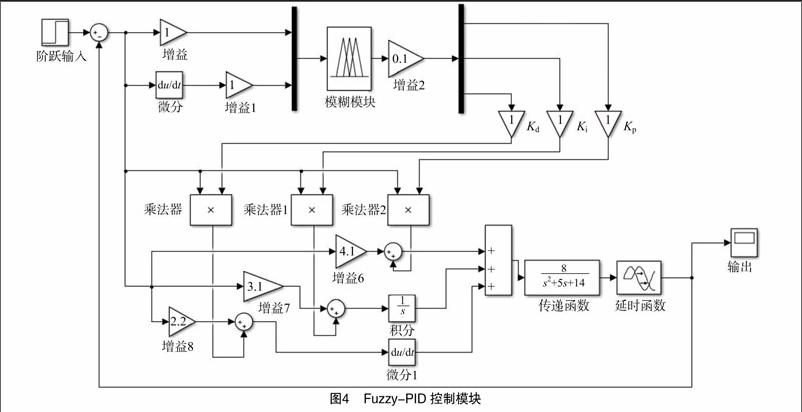
本研究假设棉花打顶机械手的运动过程是连续的,该被控对象的数学表达式为G(S)=[SX(]8S2+5S+14[SX)],其中G(S)表示开环传递函数,S是一种参数替代。
依据此传递函数,运用Fuzzy-PID控制策略进行仿真模块的搭建,系统中激励函数均采用单位阶跃函数来产生阶跃响应信号。
仿真模型建立的具体做法是:从Simulink库中调取相应的模块放入模型界面上用线连接好,并设置各模块必要的对应参数,其中对于Fuzzy-PID控制器要先编好其对应的函数,然后封装即完成Simulink仿真模型的建立[13]。Fuzzy-PID控制模块图如图4所示。
3.1仿真结果对比分析
将编辑好的“打顶模糊规则”通过命令窗口输入的读取指令读入到模糊块中,点击运行即可进行仿真,图5为 Fuzzy-PID仿真输出图。
仿真结果表明,Fuzzy-PID控制器的控制效果存在明显的优势。经过模糊规则的作用,其输出响应能较好地跟随激励信号变化,动态特性比较稳定,振荡幅度很小。随着时间的增大,输出信号最终稳定在单位阶跃值上,可见整体精确度较高,说明打顶机械手利用这种方法可以实现较为理想的控制。由于PID控制器属于反馈控制器,只有当偏差出现时,控制才会起作用,当处于时变系统时,其特性存在一定的惯性和延迟,又不可避免地造成一定的超调和调节时间[14]。单一PID控制在确定好的比例Kp、积分Ki、微分Kd 等3个参数的系统中,虽能较好地跟随输入信号的响应达到一定的控制效果,但是遇到非线性或滞后较大的系统,其鲁棒性不强,控制效果不理想。Fuzzy-PID控制打顶机械手的动态稳定性更好,无输出超调,调节时间变短,并且不依赖于被控对象的数学模型,显然更适用于棉花打顶的非线性系统,对机械手作业更有可控性。
4结论
本研究应用Fuzzy-PID的控制策略设计了鲁棒性较高的棉花打顶机械手,在硬件上对打顶机械手系统设计,根据实际作业情况的要求,采用了适用于非线性控制的模糊系统。基于Matlab软件,利用模糊工具箱提供的图形化工具进行模糊推理系统、隶属度函数和模糊规则的在线编辑,通过规则观察器和输入输出曲面的显示确立Fuzzy-PID控制器。依靠Simulink强大的功能对被控对象用Fuzzy-PID进行仿真分析[CM(25],根据其输出响应结果显示,得出利用打顶机械手工作效果令人满意,可控性更强,不但具有模糊控制灵活、响应速度快和鲁棒性能强的优点,又具有经典PID控制精度高的特点,使得打顶机械手的过渡过程时间和最大超调量等方面都达到最优化的控制[15]。但是实际应用中会有很多干扰因素存在,单纯依靠Fuzzy-PID控制器也不能完全应对所有问题,根据打顶控制的现实情况,还须要借助一定的经验才能达到令人满意的效果。
参考文献:
[1]张明辉. 棉花打顶机自动仿形升降控制系统的研究[D]. 石河子:石河子大学,2014.
[2]周海燕,尹素珍,朱立成,等. 3WDZ-6型自走式棉花打顶机设计[J]. 农业机械学报,2010,41(增刊1):86-89.
[3]张邦成,李淼,王华振,等. 微小型救援机械手控制系统设计[J]. 计算机测量与控制,2014,22(6):1803-1805.
[4]张玉磊,王维新,马本学,等. 棉花采摘机械手机构设计及参数优化[J]. 农机化研究,2015(3):142-145.[HJ1.7mm]
[5]滕朝宇,张婕,李靖鹏. 基于Kingview的虚拟机械手控制系统设计[J]. 微计算机信息,2010,26(20):190-192,214.
[6]范新明. 基于模糊PID参数自整定的温度系统控制方法[J]. 盐城工学院学报(自然科学版),2008,21(3):18-21.
[7]陆华才,徐月同,杨伟民,等. 永磁直线同步电机进给系统模糊PID控制[J]. 电工技术学报,2007,22(4):59-63.
[8]吴剑威,唐立新. 一种智能模糊PID在温度控制系统中的应用[J]. 电源技术,2013,137(5):847-849.
[9]李丽娜,柳洪义,罗忠,等. 模糊PID复合控制算法改进及应用[J]. 东北大学学报(自然科学版),2009,30(2):274-278.
[10]王利娜,翟江源. 模糊自适应PID控制在磁悬浮试验台系统中的应用及基于Matlab的仿真[C]//西南三省一市自动化与仪器仪表学术年会论文集. 成都:中国自动化学会,中国仪器仪表学会,2004:4.
[11]仇成群,刘成林,沈法华,等. 基于Matlab和模糊PID的汽车巡航控制系统设计[J]. 农业工程学报,2012,28(6):197-202.
[12]徐姣,周修理,李艳军,等. 牧草烘干机温度Fuzzy-PID控制仿真研究——基于MATLAB[J]. 农机化研究,2011(7):50-53.
[13]齐学义,蔡艾江,吴疆,等. 变风量空调系统模糊PID控制的仿真[J]. 江苏大学学报(自然科学版),2005,26(4):364-368.
[14]郭鹏. 模糊前馈与模糊PID结合的风力发电机组变桨距控制[J]. 中国电机工程学报,2010,30(8):123-128.
[15]戴焰明,周哲民. 基于参数模糊自整定PID温度控制系统[J]. 自动化与仪表,2007(3):65-68.