一种雷达探测精度分析软件的设计
2017-04-25张艳浩
张艳浩
摘要:雷达在现代战争中起着至关重要的作用,其主要功能是发现目标并对目标定位,其探测精度指标是衡量装备性能的重要依据。本论文针对验收阶段对雷达数据分析的需求,设计了一种雷达探测精度分析软件的实现方法,该方法为雷达探测精度分析提供了一种思路,且已验证了其有效性和准确性。该设计为评估雷达性能提供了参考。
关键词:雷达;探测;精度;GPS
中图分类号:TN957 文献标识码:A 文章编号:1007-9416(2017)01-0127-01
Abstract:Radar plays a vital role in modern warfare, its main function is to find the target and the target location, the detection accuracy of the indicators is an important basis for measuring equipment performance. In this paper, a radar detection accuracy analysis software is designed to meet the requirements of radar data analysis in the acceptance phase. This method provides an idea for radar detection accuracy analysis and has verified its validity and accuracy. The design provides a reference for evaluating radar performance.
Key Words:radar; detection; accuracy; GPS
1 引言
由于雷达自身的系统误差和大气折射等因素,雷达的对目标的探测位置和目标的实际位置有偏差,雷达产品在验收阶段对雷达的探测精度有量化的指标要求,其中两坐标雷达主要包括距离和方位的探测偏差。探测偏差是指目标的真实位置(目标惯导的经度值、纬度值和高度值)和雷达探测到的目标的位置之间的差值。计算偏差的工作如果由人工计算的方式,不但速度比较慢,且不容易找出雷达探测到的目标的全部信息。通过设计雷达探测精度分析软件,可以替换人员工作量的70%以上,且有更高的准确性。
2 描述和设计
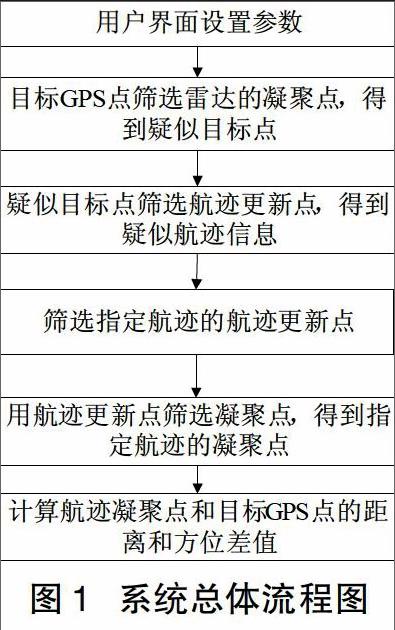
本软件的主要功能是找出同一时刻目标位置点对应的雷达探测到的凝聚点,从而用凝聚点和目标的真实位置做对比,得出雷达的探测偏差。由于本软件的输入文件是雷达工作时记录的二进制数据文件和日志文件,以及用于参照的是指定目标的GPS数据文件,故需要设计界面,方便选择输入文件和设置需要的参数。软件基于雷达工作时的记录文件,所以不同的雷达需要变更输入文件和读取文件的数据结构。处理过程涉及到凝聚点、航迹更新点,以及最后的比对分析,将本软件的处理节点进行拆分,拆分后本软件主要具备的处理流程图见图1。
2.1 目标GPS点筛选雷达的凝聚点
该功能点的输入文件是二进制凝聚点文件和目标GPS数据文件,核心是雷达探测误差的大概值,偏差大概值有两种方法获取:(1)结合该雷达过去的探测效果,评估出距离和方位的大概偏差值,(2)通过雷达的探测画面,结合操作员的工作经验,评估出距离和方位的大概偏差值。在界面上设置距离门限和方位门限,凝聚点通过时间信息匹配当前时刻目标的位置(如果目标的GPS位置信息采样周期過大,需线性插值),将目标的经纬度值坐标转换到凝聚点所在坐标系,然后计算凝聚点和目标点的距离差和方位差,将差值小于门限值的凝聚点信息作为疑似目标点输出,用于匹配航迹更新点。
2.2 疑似目标点筛选航迹更新点
该功能点的输入是功能点2.1的输出文件和记录航迹更新信息的日志文件,目的是找出雷达跟踪目标形成的所有批号,跟踪理想的状态下一个目标只有一个批号,但是由于跟踪效果不尽相同,所以会形成多个批号。由于点迹的Id号是唯一不重复的,通过疑似目标点的点迹Id号查找航迹更新点能够找出雷达跟踪目标时形成的所有批号,此处之所以不使用功能点2.1的距离和方位,或者功能点2.2跟功能点2.1合并处理,是因为航迹更新点是经过系统差调整和滤波的,其距离和方位跟凝聚点的距离和方位有不恒定的差值。本功能点输出目标所有的航迹号,方便后边针对特定批号或者所有批号计算距离差和方位差。注意此处得到的批号应做一个人工校验,防止有非目标的批号。
2.3 筛选指定航迹的航迹更新点
该功能点的输入文件是记录航迹更新信息的日志文件,通过界面输入想要查找(主要来自功能点2.2输出的航迹号)的航迹号,在航迹更新文件中查找到航迹更新信息,输出到文件,由于待查找的航迹批号可能存在重复使用的情况,且该功能点不具备自动筛选功能,故需要根据时间信息人工删除不属于目标的航迹批号信息。
2.4 航迹更新点筛选凝聚点
该功能点的输入文件是二进制凝聚点文件和功能点2.3的输出文件,通过航迹更新点中的点迹Id号跟凝聚点的Id号对比,输出航迹更新点对应的凝聚点,该功能点的必要性体现在航迹更新点的距离和方位是经过修正和滤波的,其值和凝聚点的距离和方位有偏差,探测精度应该以修正和滤波前的数值作参考。
2.5 计算距离和方位差值
该功能点输入文件是功能点2.4输出的雷达探测目标的凝聚点信息文本文件和目标GPS文件,将凝聚点时刻的目标经纬度值(可能需要线性插值)转换到凝聚点所在的坐标系,得到目标的距离和方位值,做差得到距离和方位偏差,通过调用MATLAB将差值画图,并计算均方根误差。
3 结语
经实践,该软件可以较准确高效地计算出雷达的探测精度。本文详细介绍了雷达探测精度计算过程,为雷达数据处理模块设计师仿真和评估雷达性能提供了计算探测指标的参考。
参考文献
[1]马娟.机载远程预警雷达探测精度统计方法.中国科技信息,2011(08).
[2]何友,修建娟,张晶炜,等.雷达数据处理及应用[M].第1版.北京:电子工业出版社,2006:213-272.
[3]任清安,赵洪立,刘军伟.机载雷达探测精度评估方法研究.雷达科学与技术,2011(01).
[4]李川.利用凝聚点迹来分析雷达的探测精度.雷达科学与技术,2003(02).
