汽车防碰撞系统设计与制作
2017-03-28朱立宗姚志明许凌志
朱立宗+姚志明+许凌志

摘 要:利用红外雷达,及超声波,毫米波等雷达测距及摄像头探测汽车前方路况并实时反馈给ECU,由ECU判断前方障碍物的距离,同时车内摄像头判断驾驶员是否注意路况,结合两者情况并进行监控,实现防碰撞的功能。
关键词:汽车;防碰撞;系统;设计制作
DOI:10.16640/j.cnki.37-1222/t.2017.04.177
0 引言
随着汽车行驶速度的提高,道路交通的复杂化,以及雨雪雾等复杂天气的影响,对于行车安全出现了越来越多的隐患。本设计采用红外雷达,超声波,纳米波等雷达及摄像头探测前方路况,同时车内摄像头检测驾驶员驾驶状态的防碰撞系统,既可以减少交通事故,又可以减少误刹率。
系统的组成与工作原理:
1 系统的组成
汽车防碰撞系统的组成部分:超声波毫米波等测距雷达收发模块以及红外侧面及后方雷达预警模块:完成雷达信号的发送和接收;数据采集调制模块:实时的采集回波信号 ,并且进行相应的数模转换,以供信息处理系统的使用;信息处理模块:ECU接收来自数据采集调制系统的信息,并且进行数据分析,从而判断行驶安全性;声光报警显示模块:主要是两种测距雷达,即毫米波测距雷达、超声波测距雷达,雷达产生所需的波频信号 ,通过声音和灯光报警 ,根据不同的安全情况 ,进行报警 ,并且对相应信息进行显示 ;辅助制动模块:控制电子制动器、离合器等,在紧急情况下辅助驾驶员制动汽车,同时安全带预紧装置工作,保护驾驶员;传感器模块 :通过汽车转向系统传感器 、油门踏板位置传感器 、制动踏板位置传感器、温度、速度等传感器综合感知汽车行驶状态,同时采用室内驾驶员监控摄像头判断驾驶员的头部转向及眼睛打开程度来判断驾驶员是否进入疲劳驾驶,从而减少误警率和虚警率;路况选择控制模块 :主要包括系统开关和路况模式选择开关,控制系统开闭和不同路况模式的选择,以及输入键盘进行路况控制。
2 系统的工作原理
系统由超声波测距雷达,纳米波测距雷达测量前方障碍物的实时距离,摄像头判断前方道路行人的情况,红外测距雷达测量障碍物的距离,车内摄像头采集驾驶员头部转向及眼睛打开程度,以及通过油门踏板位置传感器,制动踏板位置传感器,判断驾驶员的驾驶状态,所有雷达及探头采集到的信息反馈给ECU,通过预先设定的标准值存于ECU中,判断所反馈的信息是否超过标准值,超过后系统将做出相应的声光报警或采取紧急制动措施,系统根据速度的快慢,决定制动力矩的大小,从而达到更好的制动效果
3 系统的控制
(1) 硬件控制系统的组成,主要由控制核心MCU宏晶公司生产的STC89C52。该芯片具有价格低廉,性价比高的优点,足以应对该系统的需求。
MCU根据测距模块输入的信号进行处理,与系统的标定值进行比较对比,计算测距模块输入的信号是否超过标定值,根据超出的百分比进行相应的控制信号输出,当测距模块输入的数值超过标定值,系统开始出现警示灯亮,当该数值超过标定值的百分之五进行蜂鸣器的报警,当输入数值超过百分之十,人体的刹车反应无法赶上碰撞之前把车刹停的一个数值时,系统进行自主刹车,同时系统将根据速度的快慢进行不同力矩的刹车,只要驾驶员有踩刹车的动作,系统将会停止刹车,由驾驶员来完成。
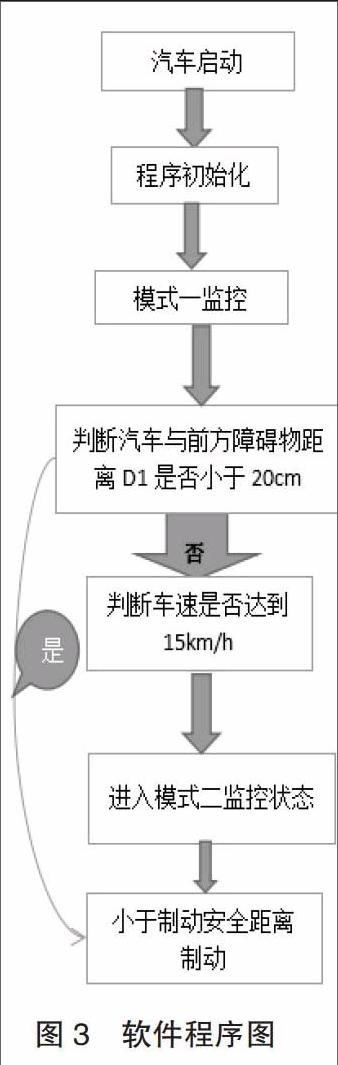
(2)软件系统的设计,汽车启动,程序初始化,判断车速是否到达监控模15km/h,判断汽车与前方障碍物的距离,是否小于安全距离D1,小于安全距离D1汽车制动,当踩下刹车,程序松开自动刹车。车速到达15km/h进入监控模式二、当汽车进入安全距离时,汽车警示灯闪烁,当汽车进入制动安全距离,系统产生制动力。软件程序图如图3所示。
4 数据采集模块
系统采用HY-SRF05超声波模块用于侧方位测量,由于实验条件有限使用的是模型车,所以不采用毫米波雷達。模块工作原理:采用IO触发测距,给至少10us的高电平信号;模块自动发送8个40khz的方波,自动检测是否有信号返回;有信号返回,通过IO输出一高电平,高电平持续的时间就是超声波从发射到返回的时间.测试距离=(高电平时间*声速(340M/S))/2;本模块可提供全套测距程序:C51,PIC18F877,超声波LCD1602显示,超声波LCD12864显示,数码管显示,串口显示等,测距参考程序。摄像头采用行车红外摄像头。
5 系统执行模块
执行模块由蜂鸣器,LED等,步进电机组成,步进电机驱动制缸完成制动任务。步进电机采用QS-M42 伺服电机监控电机搭载的编码器的反馈调整电流值,因此即使在急剧的负载变化或急加速时也不会失步,可持续运转,可在低速区域内输出高转矩,因此可用于频繁实施急加速急停的高速寸动动作及旋转台控制。步进电机与指令同步动作,因此不存在对脉冲指令的响应延迟。根据电机的负载状态控制电流,大幅减少了步进电机所特有的发热及振动。进行控制时,不必担心发热或振动,定位停止时无振荡。
6 结束语
在设计的过程中,充分考虑了系统的可行性,及设备的工作性能等方面。采用超声波,摄像头等雷达来达到测距的目的,达到了实时监测路况,近距离报警,安全距离内刹车的功能,能够对汽车起到安全保护作用。该系统操作简单,工作稳定,具有一定的实用性。
参考文献:
[1]李朝青,刘艳玲编著.单片机原理及接口技术(第四版)[J].
[2]刘树峰,吕钊钦编著.多路况下汽车防碰撞及行人保护预警系统设计[J].
[3]秦波,徐仕斌,徐瑶,廖祯芳编著.模型汽车防碰撞系统的设计[J].
[4]金桐,张保平编著.防碰撞无线通信汽车黑匣子的系统设计[J].
[5]陈中,朱代忠编著.基于STC89C52单片机的控制系统设计[J].
本文系广西科技大学2016年自治区级大学生创新创业训练计划项目《汽车防碰撞系统设计与制作》成果。
作者简介:朱立宗(1980-),广西贵港人,讲师,主要从事载运工具运用工程、CAE、职业教育研究。
