基于ME MS的飞机杆面角位移多动能传感器设计
2017-03-09高峰娟崔亚君高艳丽
高峰娟,崔亚君,高艳丽
(海军航空工程学院青岛校区,山东 青岛 2 6 6 0 4 1)
基于ME MS的飞机杆面角位移多动能传感器设计
高峰娟,崔亚君,高艳丽
(海军航空工程学院青岛校区,山东 青岛 2 6 6 0 4 1)
针对机械式量角器和电子罗盘式量角器存在的测量精度不高、易受电磁干扰、携带不方便等问题,提出了基于M E M S技术并采用了磁隔离器件的多功能传感器设计,提高了杆面角位移测量精度,有效避免了磁干扰。
M E M S技术;角位移测量;磁隔离
在“黑匣子”所记录的参数中,操纵模拟量即飞机升降舵、方向舵、副翼、襟翼、油门杆、驾驶杆、脚蹬等飞机杆/面角位移是飞行参数记录系统中应该记录的重要参数。准确记录并解析还原出此参数,为辅助飞行质量评估,事故发生后帮助相关人员进行事故调查与分析,日常机务维护时辅助地勤人员设备故障诊断等提供了有效依据。本文设计了一种基于ME MS的飞机杆/面转角倾角等操纵位移测量的多功能传感器,能够实现精确测量飞机升降舵、方向舵、副翼、襟翼、油门杆、驾驶杆、脚蹬等的转角或倾角,而且工作准备时间缩短,体积小易携带。
1 传感器设计
飞机操纵位移多动能传感器的设计是在文献[1]设计的飞机操纵位移参数标校设备的基础上,针对电子罗盘传感器进行的深度研究和开发,与文献[2]设计的飞机板面角位移远程显示装置交联,完成转角倾角的精确测量及显示。交联关系如图1。由于飞机杆/面角位移参数多、测量工位分布广、测量信号均为模拟量、精度要求高,对于多动能传感器的设计,考虑了以下原则:(1)能够与飞机板面角位移远程显示装置交联配合。(2)便于携带、可靠性高、具有一定通用性和兼容性,便于维护和升级。
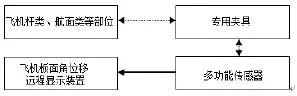
图1 飞机操纵位移多动能传感器交联关系
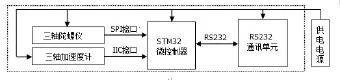
图2 飞机操纵位移多动能传感器原理框图
2 传感器原理
多功能传感器由ME MS三轴陀螺仪、ME MS三轴加速度计、S T M3 2微控制器、和RS 2 3 2通讯单元组成,工作原理框图如图2所示。
(1)ME MS三轴陀螺仪。陀螺仪采用S T公司的L 3 G系列芯片。利用速率陀螺与加速度计配合,实现对转动体绕固定转轴转动的方位角的精确测量。其具有1 6位分辨率,精度高,噪声低;有3 2位F I F O,便于数据处理,提高了与主机通讯速度;有S P I接口,便于与主机交换数据。三轴陀螺仪组成框图如图3所示。载体有转动角速度的情况下,陀螺内电容容量产生相应的变化,经放大器放大、滤波、A/D转换、数字滤波处理得到与转动角速度对应的数字量,并通过S P I接口输出。陀螺传感器内置了温度自检测电路,可对陀螺温度进行测量、转换、输出,对所测的角速度进行温度补偿,消除温度误差。(2)ME MS三轴加速度计。三轴加速度计采用F r e e s c a l e公司的芯片MMA 8 4 5 1。利用加速度计实现对转动体绕固定转轴转动的倾角(横向和纵向转角)的精确测量。其具有1 4位分辨率,精度高,噪声低;3 2位F I F O,便于数据处理;I I C接口,便于与主机机交换数据。载体有加速度变化的情况下,传感器内电容容量产生相应的变化,经C/V变换、放大器、A/D转换、D S P数字信号处理,得到与加速度对应的数字量,并通过I I C接口输出。载体偏离水平面时,重力加速度在三轴上的分量发生变化,通过测量静态重力加速度变化,转化并计算出倾角变化,输出与倾角有关的数字信号。三轴加速度计组成框图如图4所示。(3)S T M3 2微控制器。多功能传感器的主机单元采用基于A RM公司的高性能C o r t e x-M3内核的S T M3 2微控制器,是专为要求高性能、低成本、低功耗的嵌入式应用专门设计。其具有以下特点:外设丰富,含A D C、UA RT、S P I、I I C等;集成度高,含复位电路、低电压检测、调压器、精确的RC振荡器等;低功耗,在7 2 MHz时消耗3 6 mA(所有外设处于工作状态),待机时下降到2 μA。(4)RS 2 3 2通讯单元(图5)。采用RS 2 3 2协议实现传感器与飞机板面角位移远程显示装置间的数据交换,并通过电平转换电路,完成通信数据的电平转换,传感器通过串口发送的数据,采用中断方式进行接收。
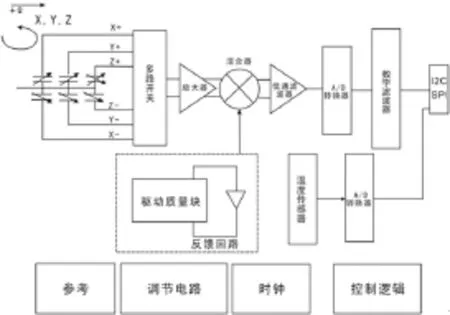
图3 三轴陀螺仪组成框图

图4 三轴加速度计组成框图
3 传感器电源
传感器电源由飞机板面角位移远程显示装置主机提供,5 V的飞机板面角位移远程显示装置电源经L D OS P X 1 1 1 7稳压后,给传感器提供3.3 V的工作电压,传感器电源如图6。在多功能传感器供电电路中采用隔离D C/D C模块,将飞机板面角位移远程显示装置的电源与传感器进行隔离,并采用控制电路对传感器是否上电进行控制。传感器D C/D C模块电路原理图见图7。为增强系统的可靠性,提高传输速率,采用磁隔离器件A D UM1 2 0 1实现飞机板面角位移远程显示装置和多功能传感器间的电气隔离。磁隔离器件A D UM1 2 0 1原理图如图8所示。
综上所述,本文设计的多功能传感器,采用ME MS技术提高测量精度,主要解决了机械式量角器测量精度不高,操作精度不易控制和电子罗盘式量角器易受电磁干扰,以及以上测量器件工作准备时间长、携带不方便等突出问题,而且体积小,精度高,具有很好的使用价值。

图5 通讯单元电平转换电路原理图

图6 传感器电源原理图

图7 传感器D C/D C模块电路原理图
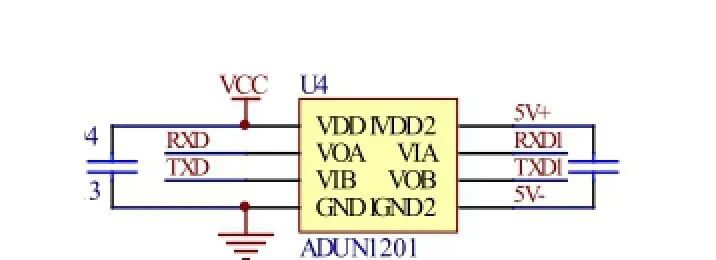
图8 磁隔离器件A D U M1 2 0 1原理图
[1]王小飞,邸亚洲,曲建岭等.飞机操纵位移参数标校设备的设计[J].仪表技术,2 0 1 1(1 1):5 4~5 6.
[2]邸亚洲,周玉平,高峰等.飞机板面角位移远程显示装置的设计[J].仪表技术,2 0 1 3(8):2 2~2 4.
T P 2 1 2;T P 2 7 4
A
1 6 7 1-0 7 1 1(2 0 1 7)0 1(上)-0 1 0 8-0 3