基于UG及STEP函数的抓举机工作装置运动仿真和分析
2017-03-08陈炎冬戴斌宇
陈炎冬,戴斌宇,冯 鲜
(1.无锡太湖学院机电工程学院,江苏 无锡214064;2.江南大学机械工程学院,江苏 无锡214122)
0 引言
圆木抓举机属于抓木运输机械类,随着机器向前行进,安装在其前端的一个完整的抓具支承结构和连杆会进行抓木工作,也可用于提升、运输和卸载工作。圆木抓举机的长处在于作业快速高效、机动性能良好、运作便捷,因而在采集木材时常作为重要运作工具,对于降低工作强度、优化作业品质,降低造价等方面起着举足轻重的作用[1-3]。
圆木抓举机的工作装置运动分析,就是对工作装置的运动轨迹、位移、速度、加速度等进行分析,判断是否满足设计要求[1]。由于圆木抓举机的抓举工作的结构复杂性,用传统的方法分析机构的运动非常费时,且精度较低。随着三维仿真技术的飞速发展,通过仿真的来进行机构运动分析已经有一些研究[4-6]。本文首先根据测绘某型圆木抓举机工作装置的结构建立每个零件的三维模型并进行装配(见图3),并以此模型为主模型在UG的运动仿真应用模块中,建立其运动仿真模型,通过解算仿真模型,可以实时获得机构运动参数,用图形和动画来模拟机构的实际运动过程,从而验证该运动机构设计的合理性,同时可以根据运动仿真结果方便地修改仿真模型的参数。
1 U G运动仿真模块介绍
UG运动仿真模块可以进行机构的干涉分析,分析机构中连杆上标记点或运动副的位移、速度、加速度等,运动仿真模块会自动复制主模型的装配文件,并建立一套用来编辑的运动分析方案[4]。用户可以根据自己的需要加以修改,而不会影响已装配好的主体模型。其仿真结果可以用来指导零件结构的设计优化。
UG运动仿真和分析的流程图如1.
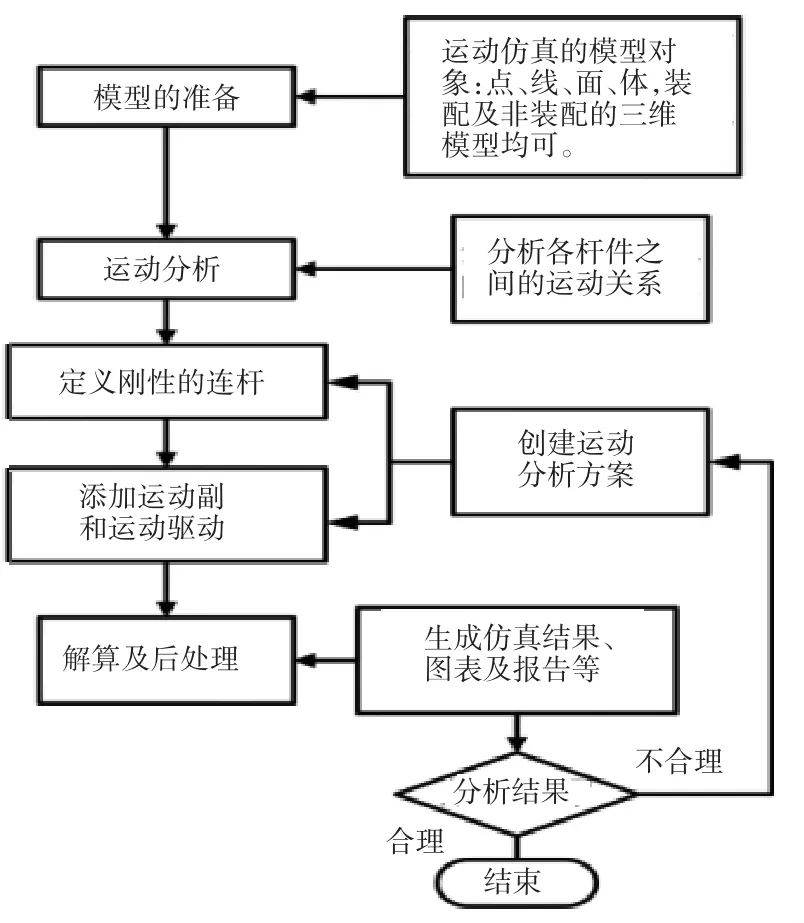
图1 U G运动仿真和分析的流程图
2 圆木抓举机的工作装置运动仿真和分析
2.1 圆木抓举机的工作装置计算机模型的建立[1]
轮式圆木抓举机工作装置按照杆数和运动特征可分为正转四杆、正转五杆、正转六杆、反转六杆、正转八杆等。这里选择反转六杆式工作机构,其优点是:转动抓具是通过转爪油缸大腔进油,掘起力也得到了提升;若适当选择尺寸,就可以在得到良好抓具平动性的同时抓具能够自动放平,结构紧凑,操作人员视线开阔[1]。见图2.
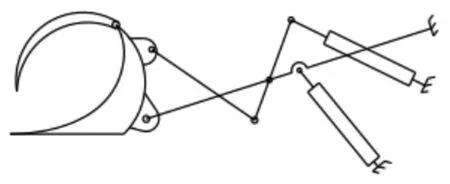
图2 反转六杆式工作方式
为进行运动仿真和分析,首先要建立能代表实际机构的三维模型,在UG中建模模块和装配模块提供了极强的造型和装配功能,建立圆木抓举机的工作装置装配图,如图3所示。
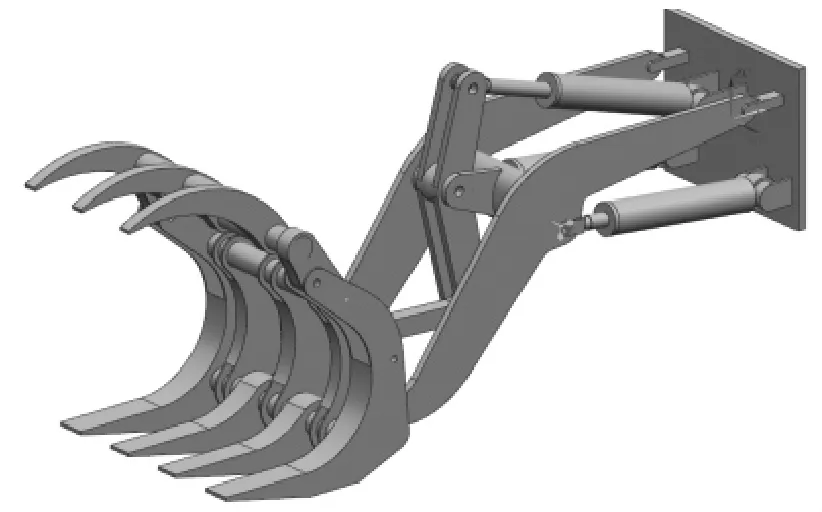
图3 抓举机的工作装置装配图图4 为连杆定义和连杆之间的运动副
2.2 创建运动分析方案
2.2.1 抓举机的工作装置连杆的创建
连杆在机构中代表运动件,所有运动的零件必须创建为连杆。每一个连杆的创建包括定义连杆对象、质量属性、惯性矩、初始转动速度和移动速度[4]。首先,在运动仿真环境下对各连杆进行定义和命名,为了定义运动副时方便,所以将两根动臂液压缸与端盖还有两根转动上爪油缸与端盖都分别定义为一根连杆,圆木抓举机的工作装置中定义的12个连杆分别为一个固定连杆-支座,其它分别为上爪、下爪、连杆、摇臂、动臂、液压缸-动臂2个、液压缸-摇臂2个、液压缸-上爪2个。所有连杆的定义及如图4(a)所示:

图3 抓举机的工作装置装配图图4 为连杆定义和连杆之间的运动副
2.2.2抓举机的工作装置运动副的创建
运动副将机构中的连杆连接在一起,从而使连杆一起运动。运动副具有允许所需运动和限制不要运动的双重作用[4]。四连杆机构中创建16个运动副,其中支座是与地固定的运动副,其它分别为9个旋转副,3个滑动副,3个共线副,具体连杆之间的运动副如图 4(b)所示。
2.2.3 抓举机的工作装置运动驱动的设计
运动驱动是赋予运动副上控制运动的参数,共有5种类型:①无驱动;②恒定驱动,设置某一运动副为等常运动(旋转或线性位移);③简谐运动驱动,产生一个光滑的向前或向后的正弦运动;④运动函数,运动副按照给定的数学函数运动;⑤关节运动驱动,设置某一运动副以特定的步长(旋转或线性位移)和特定的步数运动[4]。
本次仿真运动用到的主要是STEP函数[7],STEP函数可以分为嵌入式和叠加式两种,由于嵌入式函数便于理解,所以用了嵌入式STEP函数来控制模型的运动时间段。经考虑之后,选择将驱动分别加在动臂与支座、上爪与动臂、上爪与下爪间的转动副上。新建入STEP函数,以模拟圆木抓举机的工作情况,运动副的定义如图4(a)所示,主要采用各铰接点的转动副以及液压杆的滑动副。
经机构运动分析,三个转动副处添加的驱动函数如下:
(1)添加在转动臂液压缸上的驱动函数为:
STEP(X,0.5,0,1.75,(STEP(X,1.75,0,3,(STEP(X,3,-40,3.5,(STEP (X,3.5,-40,5.25,(STEP(X,5.25,-40,6.1,(STEP(X,6.1,0,6.5,0)))))))))))
(2)添加在转下爪上的驱动函数为:
STEP(X,0.5,0,1.75,(STEP(X,1.75,-38,3,(STEP(X,3,-38,3.5,(STEP(X,3.5,-38,5.25,(STEP(X,5.25,80,6.1,(STEP(X,6.1,0,6.5,0)))))))))))
(3)添加在转上爪上的驱动函数为:
STEP(X,0.5,0,1.75,(STEP(X,1.75,85,3,(STEP(X,3,85,3.5,(STEP(X,3.5,0,5.25,(STEP(X,5.25,0,6.1,(STEP(X,6.1,0,6.5,0)))))))))))
2.3 仿真结果与分析
进行运动学仿真和分析之前,需要设置建立一个解算方案,主要定义仿真时间和步数两个参数,设置圆木抓举机工作装置解算方案时间为8 s,正好完成一个举升和抓取动作及张开爪子和回到起始位置的过程,步数为250步,步长为8/250,解算分析完成之后,可以以动画的形式表现机构的运动仿真过程,同时在上爪质心处上做了一个标记点A,便于观察连杆的运动轨迹、位移、速度、加速度。
为了分析仿真后的结果,需要用UG运动仿真后处理模块提供了图表功能,可将运动分析的数据以表格或图形的形式输出,即绘图至NX和绘图至电子表格[4]。通过前面的运动仿真模型,在三个驱动作用下,绘制出0~8 s内的位移、速度、加速度曲线。图5、图6、图7别是调用图表功能给出的上爪质心上标记点A在Z轴方向上的位移、速度、加速度仿真结果。
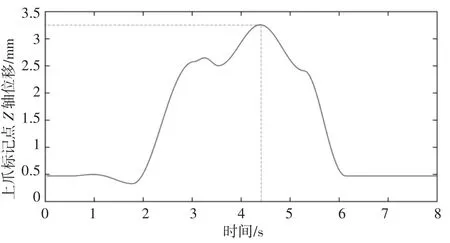
图5 上爪标记点Z轴位移
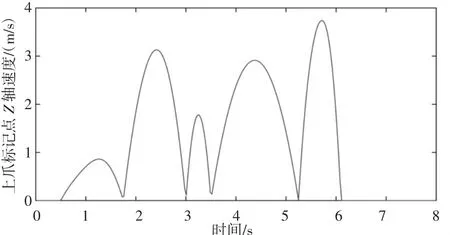
图6 上爪标记点Z轴速度
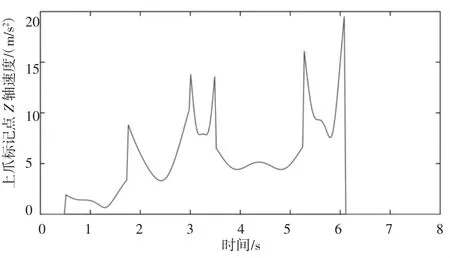
图7 上爪标记点Z轴加速度
从图5上爪标记点Z轴位移的曲线可以看出上爪最大举升高度2.8m,举升时间2.4 s,卸载时间1.6 s,图8摆动臂角度位移可以看出该机构在4 s时间内摆动角度范围-40°~+40°,都满足了抓举机的工作装置的设计要求。图6、图7通过上爪的速度和加速度曲线来反映抓举机的工作过程,上下爪闭合、整体上升、上下爪张开、下降、回到起始位置,从曲线的规律可以基本看出整个过程基本可以实现要求,但是下降时加速度偏大,需要优化。
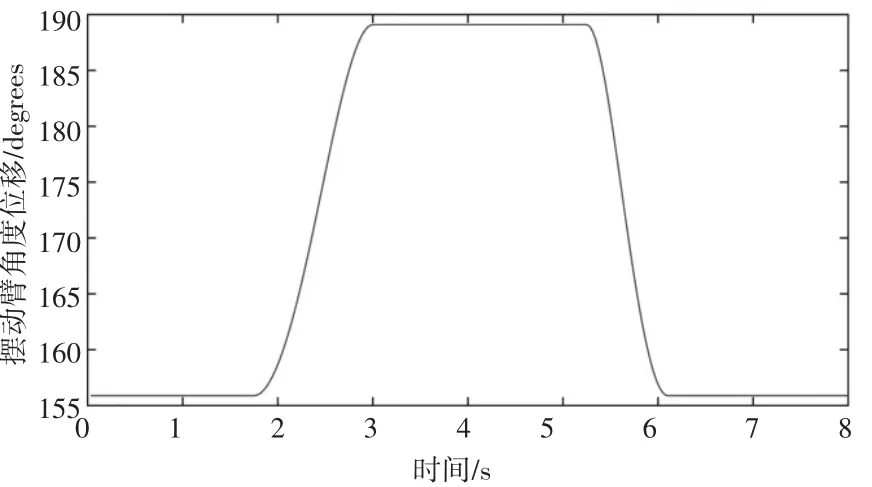
图8 摆动臂角度位移
3 结论
利用UG运动仿真模块,可以很方便地进行机构的运动仿真,轻而易举地解决复杂机构抓举机的工作装置的运动学问题,获得精确的仿真结果。结果反映出本文设计的机构抓举机的工作装置是基本合理的,比较真实的体现工作过程,但有进一步改进的方面,如加速度在卸货阶段偏大。在优化设计中也有一定的难点,标记点合理选择、STEP函数的设计和如何优化需要进行理论分析,对运动仿真提出了比较深的要求。但总的来说,UG运动仿真对对机构的验证研究对于缩短产品开发周期、提高产品质量和性能有着积极的作用。
[1]侯忠明,姚 凯,王佑君,等.挖掘装载机的发展现状及研发趋势[J].矿山机械,2008,36(6):11-14.
[2]王志云.ZL50型轮式装载机传动系统维修[J].内蒙古公路与运输,2012,128(3):79-80.
[3]张育益,张 珩.图解装载机构造与拆装维修[M].北京:化学工业出版社,2012.
[4]宋晓华,马晓丽,汪建平.利用UG实现机构的运动仿真和分析[J].实验技术与管理,2005,22(3):65-68.
[5]李 锐.基于UG的机构运动仿真和分析[J].机械工程与自动化,2010,162(1):44-45.
[6]王昕彦,孙曼丽,李 刚.轮式装载机工作装置虚拟仿真研究[J].机械科学与技术,2013,32(1):5.
[7]陈正水,邓益民.基于UG的STEP运动仿真函数对运动时间的控制分析[J].宁波大学学报(理工版),2012,25(4):103-106.
