自动旋转式黑板结构研究及仿真分析
2017-03-08张世亮陈伟嘉罗思维
吴 米,张世亮,吴 佳,陈伟嘉,罗思维
(广东海洋大学机械与动力工程学院,广东 湛江524003)
0 引言
在日常教学过程中,黑板是不可缺少的一部分。目前,国内外使用的各类黑板产品的主要结构有整块、多整块黑板组合的形式。我国学校的课堂设备的自动化程度不高,产品自动化水平较低,需要推进其智能化机械装备进程。因此开发出一类适合我国学校的课堂自动化黑板设备便是首先需要解决和最有价值问题。对于结构简单、使用方便的传统黑板来说,它存在着较为明显的书写板面不足,其结构主要分为单块式和推拉式组合式;擦拭时都是通过手动擦除黑板字迹的方式清洁黑板板面,会产生大量粉尘,粉尘飞扬,染教室环境,对人体呼吸系统产生不良影响;同时,单块式黑板使用板书量有限,而组合式黑板占据了大量的安装空间,且一旦损坏维修不便。目前市场上的某些此类产品设计只是简单的将一定面积的黑板和电子显示屏幕进行组合,相当于在传统设计的黑板结构上增加了电脑显示屏幕,没有考虑课堂黑板使用的空间以及解决黑板书写以及擦除过程中产生的灰尘,为了使学生获得更舒适、健康的授课环境,促使黑板产品升级换代。本文研发了一种采用手机控制、可自动旋转转换板面,无尘自动擦拭字迹的新型黑板,通过AdAMS仿真验证设计结构运动的可行性[1-3]。
1 设计原理及机构
1.1 设计原理及功能实现
自动旋转式黑板结构能够真实模拟在教室使用的情况,用户可以根据自己的书写方式进行在板面的书写格式,因为黑板板面设计三棱柱结构的特点,实现一面空间的三倍书写板面使用,满足老师课堂的书写量要求;当黑板需换面、清洁时,用户可利用手机蓝牙功能与黑板蓝牙控制系统连接,由此来控制黑板的更换书写面板、清理板面粉尘的功能;手机蓝牙端发送对应的指令进行旋转式三棱柱机构进行控制,三位一点槽轮传动机构收到stm32主控制装置驱动12 V电机输出动力进行启动,由12 V直流驱动槽轮旋转,槽轮每次旋转60°时可实现面更换,旋转次数可根据用户需求进行蓝牙控制。然后,stm32控制装置会驱动无尘擦除装置的直流电机运行同步带轮,从而驱动擦除带在三棱柱表面贴合移动,满足灰尘清理工作。
1.2 结构设计的技术要点
无尘擦除机构沿着右旋丝杠轨道的轴向循环移动,擦除带表面覆有韧性的毛刷材料与三棱柱侧表面充分侧表面摩擦接触,实现黑板面的自动清理灰尘功能。
自动旋转式黑板的电机驱动控制过程中的控制策略为:以stm32为主控芯片,加以L289N电机驱动模块实现对电机的驱动控制,通过蓝牙通信接收手机端输入指令来实现对电机正反转以及速度的控制,来实现黑板旋转以及灰尘处理的功能。
1.3 总体机构装配设计
自动旋转式黑板结构示意,如图1所示。

图1 自动旋转式黑板结构示意图
自动旋转式黑板结构设计研究分为三棱柱旋转机构、无尘擦除机构、蓝牙控制结构。通过手机端发送控制指令使电机带动三棱柱旋转机构,数条三棱柱定角度旋转,形成平整的黑板进行书写,在机构背面将进行真实地解决课堂对黑板使用与黑板自动清理工作。通过三棱柱机构在旋转驱动机构所传动方向进行三位一点旋转定位,旋转驱动机构由槽轮通过拨盘由平键连接直流电机12 V驱动,由stm32主控制器输出PWM信号给直流电机驱动实现对旋转驱动机构的电机控制,通过无尘擦除机构由stm32主控制器控制直流电机驱动,完成无尘擦除机构的灰尘清理工作。由于该转式智能无尘黑板实验装置提供可靠的、便捷的、人性化的、系统的操作设计以及为教室环境提供了洁净舒适的书写环境等优点。
2 关键机构的设计与仿真分析
2.1 三棱柱旋转机构设计
以单面黑板转换为三维立体传动结构的平面互换模式,其设计目的是为了增加空间层次感并且增加黑板板面书写量。三棱柱的截面为等边三角形,三棱柱黑板板面结构如图2所示。
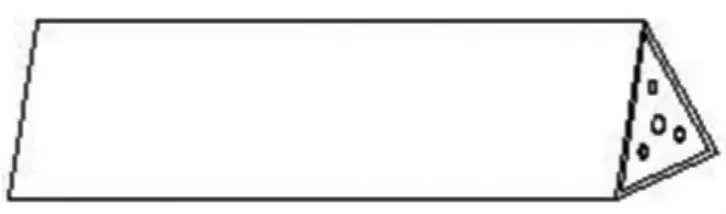
图2 三棱柱黑板板面结构
由广告百叶窗的结构启发将黑板设计为空间形式,将黑板平面设计为多边形的空间组合面。从在同一外切圆和内切圆的各个边组合而成的平面完整度,固定在墙面上的黑板书写平面平行于墙面的法向距离、各个多边立体三维结构的装配效果、结构加工难度以及黑板的板书量最大值作最优设计标准参考因素进行等三边形的结构设计选择。三棱柱黑板板面的结构布局图如图3所示。

图3 三棱柱黑板板面的结构布局
三棱柱的黑板板面在旋转机构所传动方向通过三位一点的方式在旋转方向上进行定位,当直流电机驱动旋转机构时,通过控制以stm32为主控芯片的IO口输出PWM信号的来实现对直流电机旋转方向以及运行时间的把控,以直流电机带动传动机构实现三棱柱的定位定点旋转定位,达到黑板书写板的换面工作的要求。
旋转机构采用槽轮来实现,槽轮机构的优点是结构简单、便宜制造、运动平稳[4]。电机输出轴与槽轮机构的连接方式如下图4所示。因为槽轮机构运动产生角加速度,在槽轮机构各运动中产生附加动载荷[5],利用ADAMS软件进行该机构的运动学问题进行优化分析其运转的可靠性,创建槽轮与销钉之间的接触力[6],将接触力中的Damping设置为变量,其槽轮转动角速度的优化仿真结果[7]如表1、图5所示,电机运转角速度的仿真结果如图6所示。

图4 电机输出轴与槽轮机构的连接方式
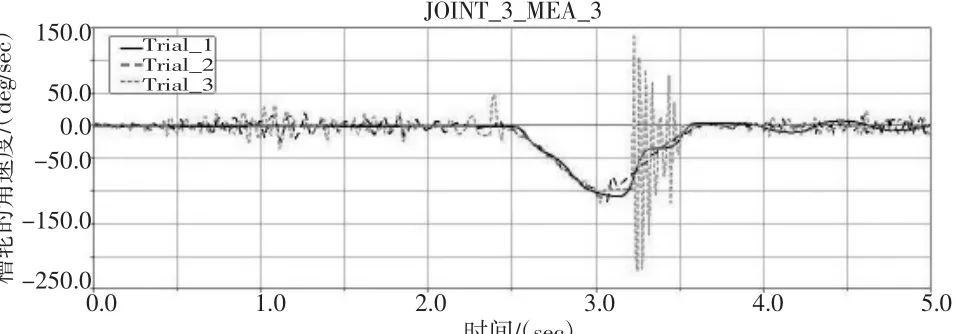
图5 槽轮转动的角速度
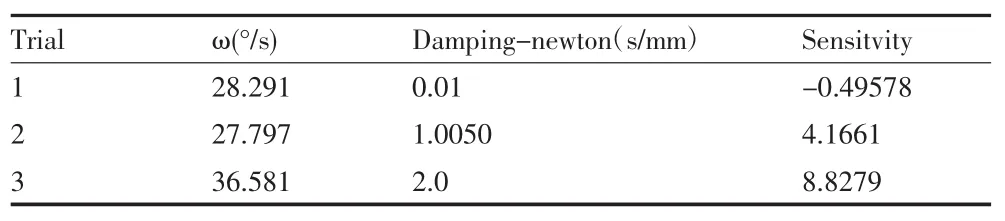
表1 变量阻尼力的仿真结果
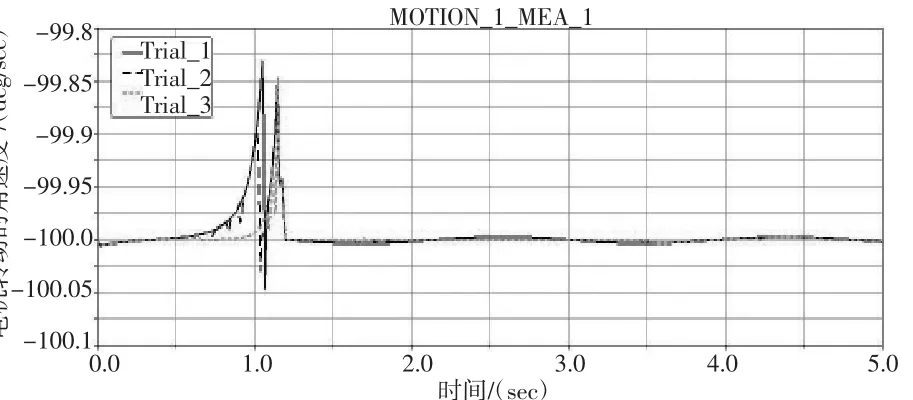
图6 电机运行的角速度
为了保障销钉与槽轮进行圆弧摩擦时保障三棱柱结构的稳定性与可靠性,通过改变阻尼有助于降低结构传递振动的能力所得到的测试分析转轴的受力情况,从而优化旋转轴的结构尺寸设计。
由结果显示,当阻尼力设置在1s/mm时,槽轮还未与销钉发生接触时,Trial2的曲线显示的转动角速度的曲线较为平稳,当槽轮与销钉发生接触后槽轮旋转60°,Tril2所显示的角速度曲线是最为光滑,而且此时的电机运行动作只有微弱的干扰;观察Trial1的发现,在槽轮收到销钉接触而转动后发生明显的波动,而Trial3试验的数据表明,槽轮在回转时角速度不稳定,而电机的运行速度收到延迟变化,通过仿真结果造成了槽轮连接的三棱柱受到振幅不定回转运动,直接影响整体结构的运行。
2.2 无尘擦除部分设计
设计的无尘擦除机构沿着右旋丝杠轨道的轴向循环移动,擦除带表面覆有韧性的毛刷材料与三棱柱侧表面充分摩擦接触,实现黑板面的自动清理灰尘功能,黑板板面擦除结构设计图如下图7所示。

图7 黑板板面擦除结构
通过可调螺栓的U型孔进行机械调整,来实现擦除机构的形状、工作空间可以方便调节,以适应不同的安装环境,也使安装更加容易方便。由stm32主控芯片的IO口信号的输出控制驱动直流电机,满足擦除带在同步带轮上的滚动传动方式,使擦除布与三棱柱的表面紧密贴合,在书写面板的背部形成封闭空间实现擦除带在三棱柱表面的清理工作,同时在封闭空间内完成集灰。擦除布和黑板背面结构如图8、图9所示。
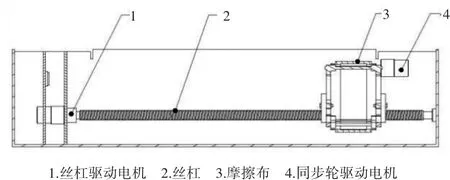
图8 擦除布与黑板整体的连接方式结构图
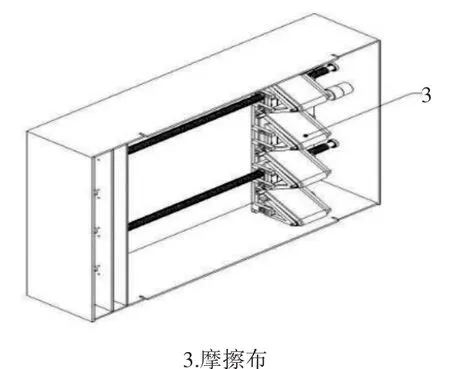
图9 黑板背面结构视图
在对擦除机构部分进行设计时,利用阻力较大的摩擦布跟随转轴的旋转而紧密贴合三棱柱平面上实现平移运动。运动副摩擦对机构动力学特性有一定影响,其中运动副间隙和机构摩擦对机构的动力特性具有不可忽视的影响,在机构设计中应引起重视[8]。通过ADAMS软件对摩擦布循环运动时,在三棱柱表面摩擦运动进行动力学分析,其仿真结果如图10、图11所示。
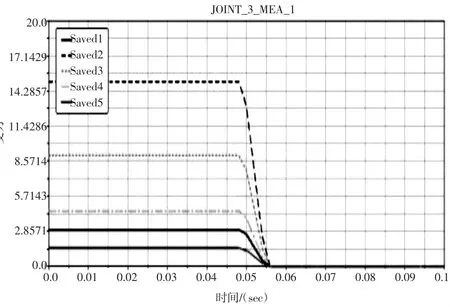
图10 摩擦布滑移运动的受力分析结果

图11 摩擦布滑移运动的位移分析结果
由上图的仿真曲线可知,设定擦除机构的速度为定量,三棱柱的材料设计为亚克力板,当增大摩擦布的摩擦系数时发现擦除机构在三棱柱的滑动摩擦力出现间断变化,仿真结果出现抖动现象;在仿真试验中进行反复调试其摩擦系数取值,最终获得合适的摩擦系数值能使擦除机构平稳运行。
3 旋转式无尘黑板蓝牙控制端设计
3.1 蓝牙控制总体结构设计
由上述分析的黑板功能可知,需通过驱动电机来实现黑板板面的转轴旋转达到板面旋转到特定的位置要求。该设计采用stm32主芯片实现三棱柱旋转黑板的反转功能和擦除功能[9],通过外接蓝牙模块实现对手机端控制信号的接收,系统的设计框图如图12所示。

图12 下位机端的控制系统结构框图
3.2 下位机端各部分详细介绍
下位机端主要是由stm32主控制器输出PWM信号给直流电机驱动实现对旋转驱动机构的电机控制。所设计的无尘擦除机构由stm32主控制器控制直流电机驱动连接轴,满足同步带轮与擦除带的线接触传动方式。该驱动模块可以接受12 V的驱动电压,当驱动电压为7 V~12 V时,可以使能板载的5 V逻辑供电。当使能板载5 V电压供电之后,接口中的+5 V供电接口不要输入电压,可以通过+5 V的供电接口实现对主控芯片stm32的供电需求。
电机的控制策略为通过该驱动模块的2路H桥驱动,可以实现同时驱动两个电机。其中要要到的控制管脚为 ENA、ENB、IN1、IN2、IN3、IN4. 其中 ENA、ENB为使能管脚,通过这两个管脚的PWM输出来实现对电机的转速调节;IN1、IN2、IN3、IN4 为电机的方向调节,其中 IN1、IN2为一组,IN3、IN4为一组。OUT1,OUT2为电机连接管脚,直接连接到直流电机的两个管脚上面。使能ENA后输入PWM信号,可以分别从IN1、IN2输入高、低电平信号驱动电机1的转速和方向;使能ENB后输入PWM信号,可以分别从IN3、IN4输入高、低电平信号驱动电机2的转速和方向。
stm32主控制装置的实际工作参数(直流电机型号、转速控制、旋转黑板面的工作时间等具体参数)通过实际各部件的安装位置进行实际实验以及参数调试来得到合适的具体值。
4 结论
(1)根据自动旋转式黑板三维结构的设计与实验研究,利用计算机辅助制造的条件解决了现有黑板存在的设计不佳和成本价值的问题。
(2)利用AMAMS仿真软件进行机构运动学及动力学分析据,模拟了接近真实的工作环境要求,根据测量数据图像提前认识到设计的缺陷与漏洞,提高在设计理论机构的验证与实验分析优化的工作效率。
(3)对于满足教育设施中的黑板结构的智能化机械装备产品的改进,实现黑板课堂使用率的有效提高、减少环境污染、保护老师和学生远离粉尘、开发环保循环机械设备,具有深刻意义,为教育设备的科学、优化设计提供新的参考。
[1]徐漫琳,李立成,郑 涛,等.基于STC89C52单片机的正三棱柱翻转黑板控制系统[J].机电工程,2014,31(11):1441-1446.
[2]李鑫鑫.全方位智能黑板的研究与设计[J].SILICON VAL LEY.2014,7(15):16,21.
[3]任志刚,张亚增,程海明,等.粉笔尘对教师健康危害的研究[J].中国学校卫生,2002(02):189.
[4]王 威,沈 政,宋玉玲,等.含间隙和干摩擦的连杆机构系统动力学研究[J].振动与冲击,2015,34(18):210-214.
[5]杨良渠.3包机中外槽轮机构运动分析[J].包装工程,2014(40).
[6]宋少云.ADAMS在机械设计中的应用[M].北京:国防工业出版社,2017.
[7]Al beta Sapietová.Sensitivity Analysis Application for Multi body System Synthesis[A].Information Engineering Research Institute,USA.Proceedings of 2013 2nd International Confer ence on Recent Trends in Materials and Mechanical Engi neering(ICRTMME 2013 Ⅱ)[C]//Information Engineering Re search Institute,USA:2013:6-10.
[8]赵德胜,袁立行,吴荣军.考虑摩擦的含S副间隙6-SPS机构动力学分析[J].华中科技大学学报(自然科学版),2017,45(06):79-84.
[9]郭 康,梁远亮,王党利.基于AT89C52单片机的三棱柱旋转黑板的研究[J].机械工程师,2015(10):176-178.
