基于混合高斯模型的窄带目标跟踪方法
2017-03-02曾绮雯葛辉良
曾绮雯, 葛辉良
(杭州应用声学研究所,浙江 杭州 310012)
基于混合高斯模型的窄带目标跟踪方法
曾绮雯, 葛辉良
(杭州应用声学研究所,浙江 杭州 310012)
基于混合高斯模型的轨迹分布融合方法适用于窄带目标跟踪系统。这种算法针对宽带跟踪结果的不精确,目标模糊,窄带跟踪需要依赖人工实现的问题,提出了一种基于混合高斯模型的自动窄带目标跟踪技术。该方法首先将目标方位分布看做是混合高斯模型,利用期望最大化算法估计混合高斯模型中的参数,然后利用混合高斯模型对目标方位进行聚类,最后利用平均加权法对目标方位进行融合,得到清晰稳定的目标跟踪结果。
期望最大化算法; 混合高斯模型; 数据融合
0 引 言
随着潜艇减振降噪技术的发展,潜艇辐射噪声不断降低。潜艇辐射噪声中低频分量的抑制难度较大,尤其是仍存在一些较强的、稳定的低频线谱成分。在水声被动检测和跟踪目标领域中,这些低频线谱成分不仅频率稳定,还具有相对较高的信噪比并携带声源特征信息,长期以来一直被广泛研究和应用于水声工程实践[1]。在宽带[2]警戒中,往往不能够精确地分辨出两个很相近的目标,并且目标检测结果的精度较低,跟踪结果不够精确。但是,窄带警戒只能给出多波束低频搜索与测距(low-frequency acquisition and ranging,LOFAR)处理结果,需要声纳员通过线谱的观测检测目标、估计目标方位,无法与宽带警戒一样进行自动或半自动的目标跟踪[2,3]。因此,如何利用窄带信息对目标进行检测跟踪已经成为了目前的研究热点。
针对宽带跟踪结果的不精确,目标模糊,窄带跟踪需要依赖人工实现的问题,本文提出了一种基于混合高斯模型的自动窄带目标跟踪技术。该方法首先将目标方位分布看做是混合高斯模型,利用期望最大化算法估计混合高斯模型中的参数,然后利用混合高斯模型对目标方位进行聚类,最后利用平均加权法对目标方位进行融合,得到清晰稳定的目标跟踪结果。经海试验数据验证表明,这种窄带跟踪方法有更好的跟踪精度以及目标检测能力。
1 基于混合高斯的窄带目标跟踪算法
在对多波束LOFAR[4]进行线谱检测跟踪之后,利用检测出来的线谱进一步得出窄带方位历程图,为了判断不同的窄带方位信息是否是由同一目标产生的,可以把不同的线谱轨迹看成是独立的高斯分布,那么整个窄带历程的所有轨迹就可以看成是混合高斯,再利用期望最大化(expectation maximization,EM)算法估计这个混合高斯的相关参数进而可以对轨迹进行聚类。在得到聚类的结果之后,利用平均加权法对同一类别里面的轨迹进行融合,融合之后的历程就是目标跟踪结果。
1.1 基于混合高斯的EM算法
对于目标跟踪,不同线谱的方位分布可以看做是独立的高斯分布,整个窄带方位历程中所有方位分布可以看成为一个混合高斯模型。混合高斯模型基于一个概率密度假设:所有的数据点X={x1,x2,…,xN},是从同一个概率密度中独立抽样得来的。这个概率密度函数为几个高斯函数的线性组合
(1)
其中,加权系数满足
(2)

极大似然估计的基本思想是:随机抽样得到的样本出现的模式是所有可能出现的结果中概率最大的一种。所以应该选取概率密度函数的参数以使出现这些样本的联合密度最大。
倘若样本源于一维高斯分布P(x)=G(x;μ,σ)。其中μ,σ为待求解的参数,分别为一维高斯函数的均值和标准差,x={x1,x2,…,xn}。求解这些参数的一般过程是:
构造似然函数
(3)
一般写成对数形式化简上面的表达式
(4)
求极值点对应的参数
(5)
解得
(6)
由上面的求解过程就可以得到一维高斯分布的参数估计,但是当数据点被假设为服从式(1)的混合高斯分布时,很难用同样的方法获得如式(6)的各个参数的解析表达式。所以对于混合高斯分布的参数估计问题,本文采用期望最大化算法,即EM算法进行估计。

Q(Θ,Θt)=EY[lnp(X,Y;Θ|X,Θt)]
(7)

(8)
其中
(9)

根据上面介绍的方法,利用EM算法可以目标方位分布进行参数估计,得到所有方位分布的概率密度函数之后,就可以判别归属同一类别的轨迹。EM算法能保证似然函数在整个迭代过程中不断增加,最后收敛于似然函数的某个极值点,并且把一个无监督学习规划到了有监督学习,不仅得到数据点,还知道数据点是由哪些高斯成员产生的,有效地提高了接下来的目标方位分布聚类的工作效率[8,9]。
1.2 窄带历程的聚类和融合
在所有的目标方位分布都已知的情况下,需要利用混合高斯模型对这些方位分布进行聚类。聚类方法采用类似贝叶斯分类法,这个聚类过程是通过比较P(j|xi;Θ)来进行的。根据贝叶斯定理
(10)

聚类之后,就可以将相近的目标轨迹进行融合,融合算法采用的是加权平均法[10]。对于tj时刻,在第m类中所有的方位θi,i=1,2,…,n,每个方位出现在这个类中的概率都不相同,不能直接对方位信息求平均。根据每个方位出现在时间方位历程图中的能量的不同,可以计算出每一个方位出现在本类中的权重,如式(11)所示
(11)
式中 f(t,θi)为tj时刻,方位为θi的时间方位历程图上所对应点的能量。
再利用这个权重与方位的平均加权就可以得到融合之后的方位,如式(12)所示
(12)
最后对每一个时刻的方位利用上述方法进行分类融合,即可实现对目标轨迹的跟踪。具体过程如图1所示。
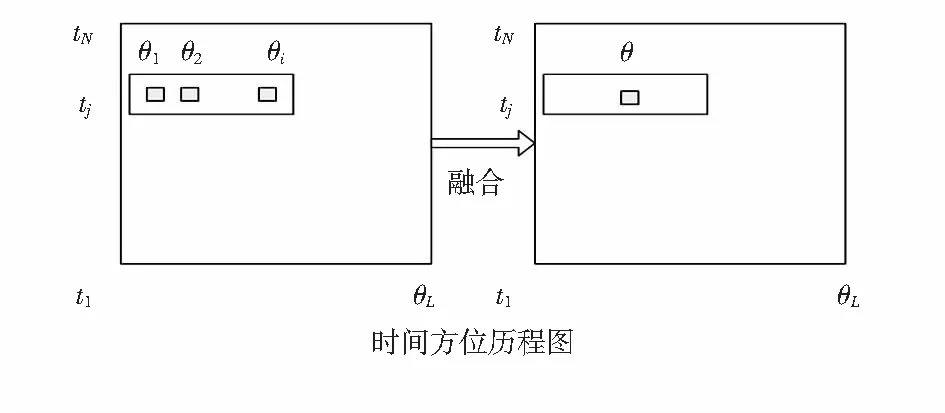
图1 融合过程示意图
2 海试数据处理
本文提出的窄带目标跟踪方法如下图2所示。
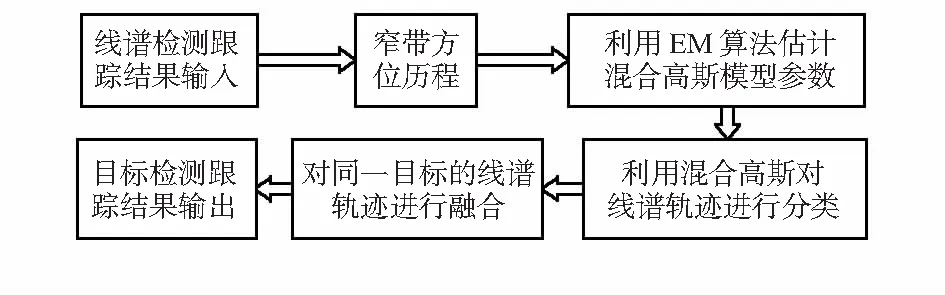
图2 窄带跟踪流程图
对某次实际实验数据按照上述步骤进行相应处理,首先对利用EM算法估计线谱的参数,如图3实线为目标实际的方位分布直方图,虚线为利用EM算法估计的混合高斯概率分布。可以看出,利用EM算法对线谱方位轨迹估计的直方图与实际结果相差不大,能够有效地估计混合高斯模型的参数,为下一步对目标方位分布的分类提供了保障。
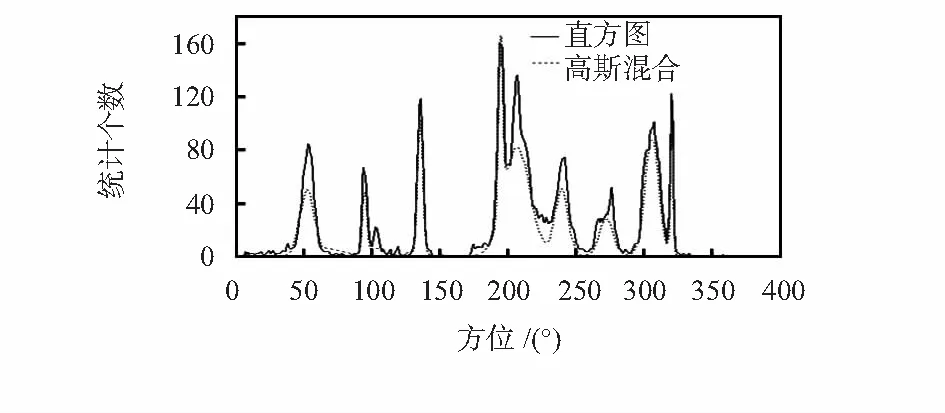
图3 轨迹方位分布直方图
在估计出目标方位分布这个混合高斯模型的参数之后,需要对目标方位分布进行分类,分类的结果如下图4所示,从图中可以看出目标轨迹被分成10个类,通过比较某一方位分布出现在不同类别的概率,取概率最大的类别为最终分类,从图中可以看出不是所有相邻的方位就会被划分为一类,这样一来大大降低了误判的概率,提高目标跟踪的准确度。
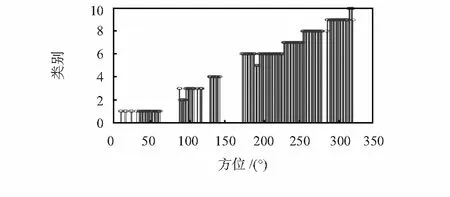
图4 方位分布分类示意图
分类工作完成之后,就需要利用平均加权对同一类的轨迹进行融合,融合前后的历程图比较如下图5所示。图5(a)为原始的方位历程图,可以看出目标轨迹比较模糊,有方位泄露,从图中只能分辨出一条清晰完整的轨迹,只能判断出一个目标,并且目标的方位信息精度较低;而图5(b)为利用本文提出的跟踪方法得到的时间方位历程图,目标的轨迹变得清晰,目标数目也从宽带结果的单个目标变成了多个目标,目标跟踪的精度变高,可以准确地得到目标的方位信息。以上海试数据计算结果表明,本文窄带跟踪算法效果良好,具有一定实用性。
3 结 论
经试验数据验证,本文针对宽带跟踪的目标方位不精
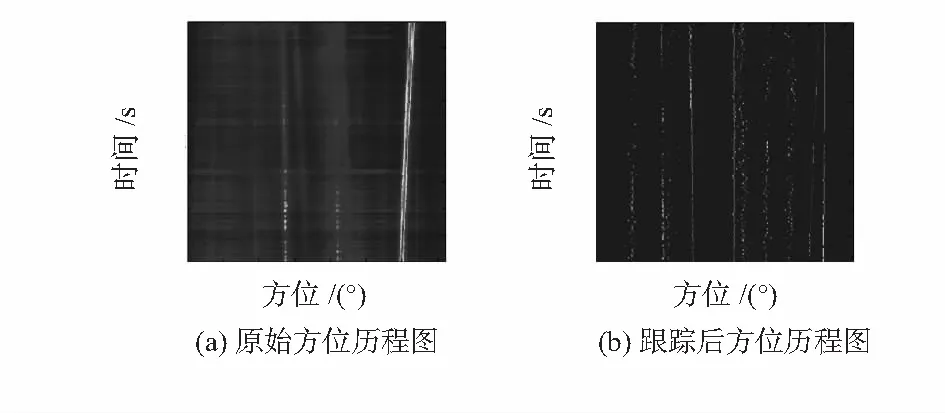
图5 跟踪前后方位历程对比图
确、目标检测能力差以及窄带跟踪系统的非自动问题提出的自动的窄带跟踪算法可以有效地提高目标跟踪的精度和目标检测能力,解决了窄带跟踪过分依赖人工的问题。
[1] Di Martino J C,Haton J P,Laporte A.Lofargram line tracking by multistage decision process[C]∥IEEE International Conference on Acoustics,Speech,and Signal Processing,ICASSP’93,IEEE,1993:317-320.
[2] 孙 俊,陈亚伟,李崇谊,等.基于雷达宽窄带多特征信息融合的空中目标识别[J].现代雷达,2015,37(7):15-19.
[3] 朱周华.期望最大(EM)算法及其在混合高斯模型中的应用[J].现代电子技术,2003(24):88-90.
[4] 邱 藤.基于高斯混合模型的EM算法及其应用研究[D].杭州:电子科技大学,2015.
[5] 王文武.像素级图像融合技术研究[D].武汉:华中科技大学,2005.
[6] 岳 佳,王士同.高斯混合模型聚类中EM算法及初始化的研究[J].微计算机信息,2006(11):244-246.
[7] 王 源,陈亚军.基于高斯混合模型的 EM 学习算法[J].山西师范大学学报:自然科学版,2005,19(1):46-49.
[8] 王维彬,钟润添.一种基于贪心EM算法学习GMM的聚类算法[J].计算机仿真,2007,24(2):65-68.
[9] Di Martino J C,Haton J P,Laporte A.Lofargram line tracking by multistage decision process[C]∥IEEE International Conference on Acoustics,Speech,and Signal Processing,ICASSP’93,IEEE,1993:317-320.
[10] Abel J S,Lee H J,Lowell A P.An image processing approach to frequency tracking application to sonar data[C]∥IEEE International Conference on Acoustics,Speech,and Signal Processing,ICASSP’92,IEEE,1992:561-564.
[11] Di Martino J C,Tabbone S.Detection of lofar lines[C]∥International Conference on Image Analysis and Processing,Berlin Heidelberg:Springer,1995:709-714.
Narrowband target tracking method based on Gaussian mixture model
ZENG Qi-wen, GE Hui-liang
(Hangzhou Institute of Applied Acoustics,Hangzhou 310012,China)
The method of trajectory distribution fusion based on Gaussian mixture model(GMM)is suitable for narrowband target tracking system.Aiming at the problems of inaccurate,ambiguous and narrowband tracking of wideband tracking results,an algorithm based on hybrid Gaussian model is proposed for automatic narrowband target tracking.Target azimuth distribution is regarded as mixed Gaussian model,and the expectation maximization algorithm is used to estimate the parameters of the mixed Gaussian model.Gaussian mixture model is used to cluster target azimuth.Target weighting method is used to fuse the target azimuth,and get clear and stable target tracking results.
expectation maximization algorithm; Gaussian mixture model(GMM); data fusion
10.13873/J.1000—9787(2017)03—0070—03
2017—01—20
TP 391
A
1000—9787(2017)03—0070—03
曾绮雯(1992-),女,硕士研究生,主要研究方向为信号处理。
