寻迹和避障智能小车系统设计
2017-02-21李志宜帅江华
李志宜+++帅江华
摘 要:利用51单片机、玩具小车、红外传感器和液晶显示屏设计智能小车系统。小车能够正向、反向、转弯行驶,且行驶速度可调;遇到障碍物能够转弯,即避障;能够按照一定的轨迹行驶,即寻迹;可以通过1602液晶显示屏观察小车相关信息。
关键词:51单片机;玩具小车;寻迹;避障
1 寻迹和避障智能小车总体设计
红外传感器有很好的功能,可以检测物体的存在,调节它的灵敏度可以改变小车的反应速度和距离,最后指导小车的运动轨迹。
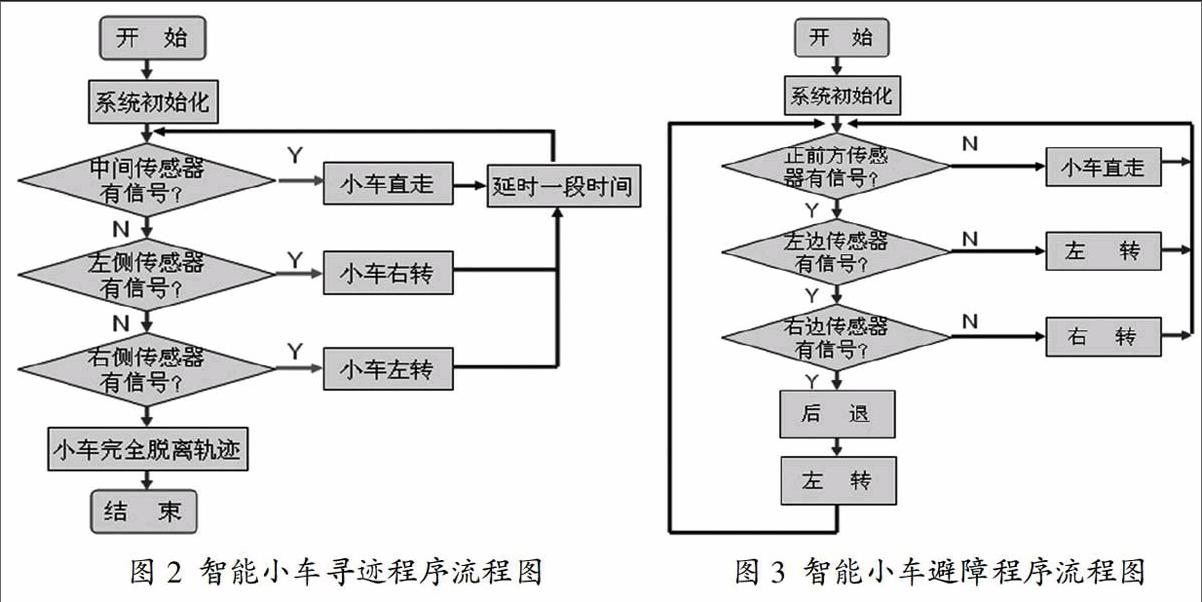
寻迹过程:在小车底部左、中、右各装上一个传感器,且中间的传感器刚好能检测到轨迹,而两边的传感器在中间传感器检测到轨迹的时候都不能检测的轨迹,这有点类似人眼的定位。当中间传感器检测到轨迹,而两侧传感器没有检测到轨迹时,表明小车正在轨迹上,这时应该直走;当左侧传感器检测到轨迹,中间和右边传感器均未检测到轨迹时,表明小车行驶偏右,测试小车应向左转弯;当右侧传感器检测到轨迹,中间和左边传感器均未检测到传感器时,表明小车行驶偏左,测试小车应向右转弯;当三个传感器均未检测到轨迹时,表明小车这时已经完全偏离了轨道,此时应该认为调整。
避障过程:在小车正前方,左侧、右侧各安装一个红外传感器。
具体操作如下:
(1)按照以下电路图连接好电路,并调接红外发射管的发射频率,以改变红外发射距离的远近;
(2)对于智能小车的寻迹,在小车底部安装3个红外传感器;
(3)对于智能小车的避障,可在小车正前端和左右两侧各装一个红外传感器,使小车能够在空旷的房间里不撞上障碍物地行驶;
(4)调整红外传感器的接收距离,观察小车的行驶过程;
(5)解决搭建小车和小车行驶过程中出现的一些问题。
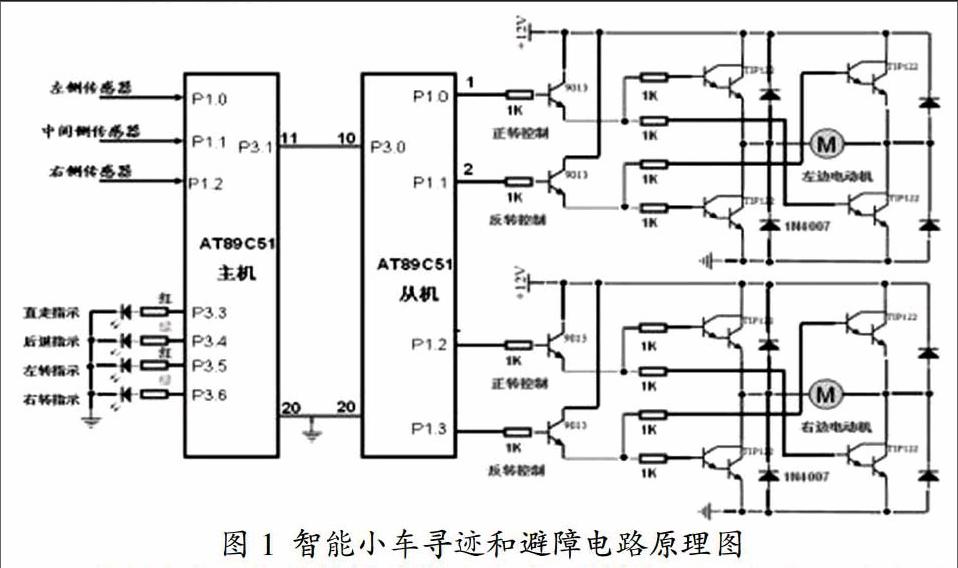
2 硬件电路图
本电路由2个单片机为核心组成,型号为AT89C51,一个主要采集3组传感器的信息和指示灯显示。另一个单片机连接主电路,他们之间通过P3.1和P3.0通讯。P1口的低四位控制电机的正反转。采用达林顿管放大电流驱动电机。主电路采用+12v电压供电。
3 程序流程图
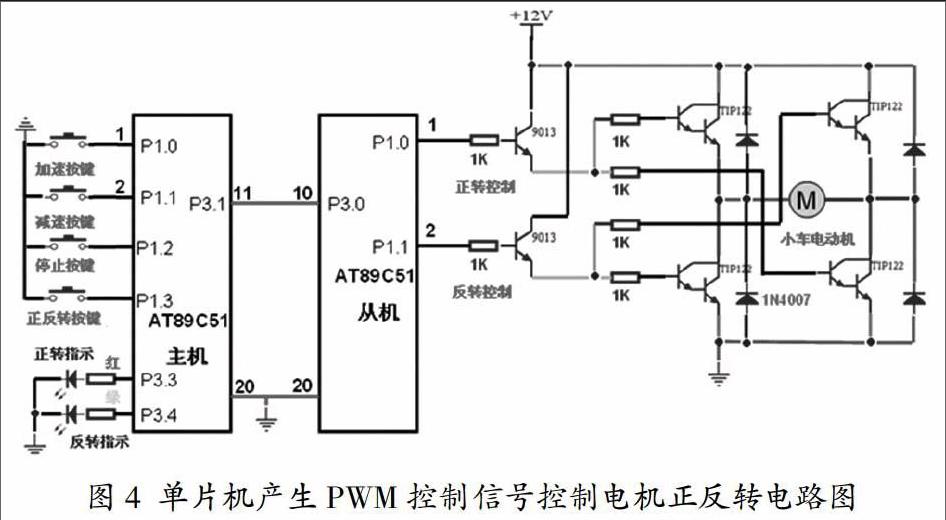
4 PWM信号控制直流电机
4.1 工作原理
通过电路控制开关的开通和断开的频率,也就是在一个周期内控制通和断的时间。具体见电路原理图,各部分参数标注在电路上。
4.2 电路原理图
5 红外传感器避障和寻迹
工作原理:利用LM567低频锁相环和LM358高增益集成運放构成红外传感器。集成电路LM567的工作电压为4.75V-9V,中心频率调节从0.01Hz-500KHz,静态工作电流约为8mA,抗干扰能力强。
本实验使用如图5电路,LM567音频锁相环电路外接电阻R4,电容C3产生40KHz左右的振荡信号,一则作为本身的中心频率,另一方面通过LM567第5脚输出方波信号,另一面通过LM567第5脚输出方波信号,经过三极管VT1放大驱动后,由“F”端控制红外发射二极管转化为红外线发射出去。当红外发射二极管发射出的红外线遇到遮挡物,便反射到接收管,由“J”端外接的红外接收二极管接收到发射回来的2~40KHz红外信号,经集成运算放大器LM358(见图)构成的反向比例放大后,由1脚输出放大后的40KHz方波信号,经C2耦合到LM567音频锁相环3脚,当3脚的输入信号中含有LM567设定的中心频率(该频率可通过电位器Rp调节)时,经LM567内部的正交相位检测电路比较后,LM567的8脚输出电平由原来的高电平转换为低电平,在经由LM358构成的电压比较器输出高电平。当由遮挡物时,输出为低电平,反之,输出高电平。
整个设计以单片机为核心,采用多个传感器,将硬件和软件结合起来,将设计程序做到完美,这样可以减少硬件电路的复杂度,节省成本,实现小车在原定的轨道行驶,自动避让阻碍,最终到达指定的地方。
