采用积分流形与观测器的并联机器人轨迹控制
2017-02-08孔民秀陈正升
孔民秀, 陈正升, 刘 明, 季 晨
(哈尔滨工业大学 机电工程学院, 哈尔滨 150001)
采用积分流形与观测器的并联机器人轨迹控制
孔民秀, 陈正升, 刘 明, 季 晨
(哈尔滨工业大学 机电工程学院, 哈尔滨 150001)
针对含柔性杆件并联机器人在高速运行时其末端存在弹性位移问题,以3RRR并联机器人为研究对象,提出一种基于积分流形与高增益观测器的柔性并联机器人轨迹跟踪复合控制算法.基于刚度矩阵引入小参数,将刚柔耦合动力学模型转为慢速与快速两个子系统.针对慢速子系统,采用反演控制,实现对末端刚体运动的跟踪控制,同时为避免杆件弹性变形与振动组成的弹性位移对机器人末端轨迹的影响,推导校正力矩,实现对弹性位移的补偿.针对快速子系统,采用滑模变结构控制,保证流形成立.为避免对曲率变化率的直接测量,引入高增益观测器对其进行估计.采用Lyapunov稳定性原理证明系统整体稳定性,并给出小参数上界.对提出的复合控制算法与奇异摄动及基于刚体动力学的反演控制算法进行仿真,从机器人末端振动抑制与轨迹跟踪性能两方面进行对比,验证了本文所提算法的控制效果.
并联机器人;积分流形;高增益观测器;复合控制;滑模控制;反演控制;振动抑制
并联机器人由于具有高精度、高刚度及大负载自重比等优点,得到了广泛关注,并已大量应用于高速搬运、运动模拟与电子制造等行业中[1].为了降低成本并减小能耗,本体轻量化设计将是必然选择.然而,在高速或重载运行场合,轻量化的机械本体将会产生明显的弹性变形及振动,因而机器人末端运动由刚体运动及弹性变形与振动产生的弹性位移组成.采用传统针对刚体机器人的控制方法将无法保证柔性机器人末端良好的跟踪精度.
Dwivedy等[2]对含柔性杆件机器人动力学建模进行了综述.由于杆件柔性的存在,当选择机器人末端作为输出时,系统将呈现非最小相位特性.文献[3-5]将杆件弹性计及到机器人的末端位置进行输出重定义,并采用针对刚体机器人的控制算法对新输出进行控制;然而,该方法只能实现点位控制,不能保证对末端轨迹的跟踪控制[6].奇异摄动是另外一种解决含弹性环节机器人非最小相位特性的有效方法,通过引入小参数对刚柔耦合模型进行降阶,将其分解为快慢两个子系统,并采用复合控制算法设计两个子系统控制器,实现了对刚体运动的控制及弹性振动的快速抑制;然而,随着变形量的加大,奇异摄动算法显现出了不足,同时该算法无法实现对弹性位移的补偿[7-9].Khorasani[10]通过对快速子系统变量的高阶逼近,提出了积分流形方法,使得振动抑制效果有了较大提高.通过将弹性位移引入机器人末端,并以此设计校正力矩,MOALLEM等[11]实现了两自由度串联机器人的轨迹跟踪精确控制与振动抑制.在此基础上,Fotouhi等[12-16]通过简化校正力矩的选择,研究了柔性关节机器人、单杆柔性机器人、刚柔混合杆件机器人、两杆柔性机器人轨迹跟踪控制,并取得了良好效果.
由于闭链结构的存在,考虑杆件柔性时并联机器人模型较复杂,对其进行振动抑制与轨迹跟踪控制的研究极为有限.
为解决高速并联机器人因杆件柔性产生的弹性变形与振动问题,提高跟踪精度与动态性能,本文将以前期研究的3RRR并联机器人刚柔耦合模型为基础[17],基于小变形假设及速度映射关系描述动平台弹性位移,通过积分流形将高阶刚柔耦合模型转化为快慢两个子系统,提出基于滑模变结构控制与反演控制相结合的复合控制算法,引入高增益观测器解决曲率变化率难于测量的问题,并开展仿真研究,对算法可行性进行验证.
1 3RRR并联机器人动力学模型

由文献[17]可知,被动杆柔性可忽略,这里只考虑主动杆变形,可以表述为

(1)
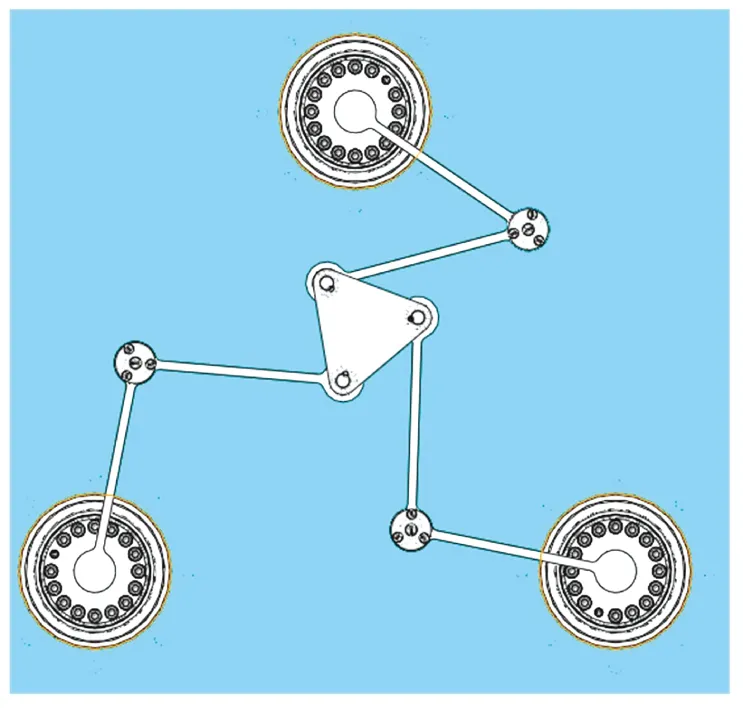
图1 3RRR并联机器人

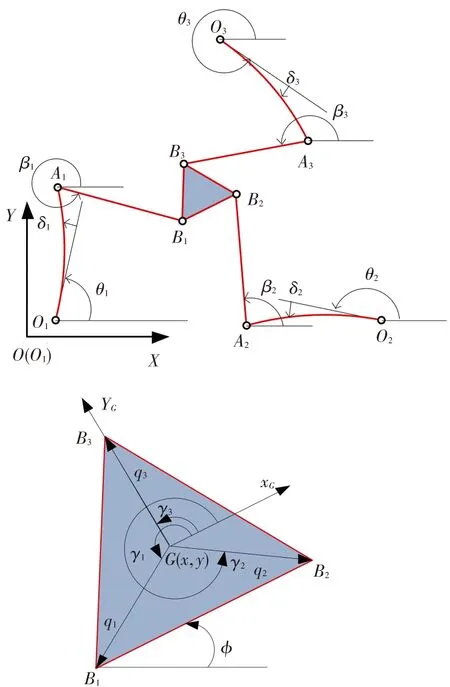
图2 3RRR并联机器人坐标系
2 基于积分流形的高速并联机器人模型降阶
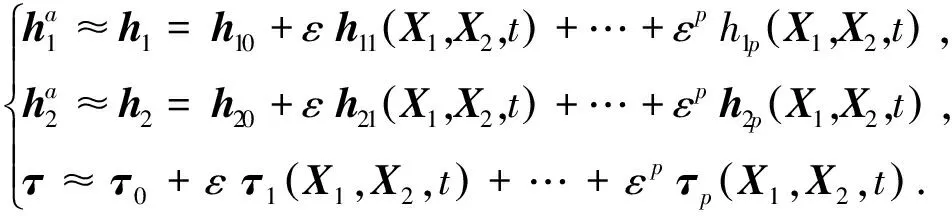
根据动力学模型(1),定义如下状态变量[15]:
(2)

(3)
(4)


(5)
式(5)可解释为,如果在时刻t*快速子系统变量到达积分流形轨迹,那么对于∀t>t*时刻,该变量将始终保持在该流形轨迹上,为了保证上述条件的成立,在原控制系统中加入附加控制变量.
(6)

由于质量阵的逆矩阵及科氏力与离心力项均为小变量ε的函数,泰勒展开中对小参数保留到二阶,这里依然保留二阶,忽略分母中小参数,逆矩阵关于ε的泰勒级数可表示为
(7)
方程(1)展开后的离心力与惯性力可表示为
(8)
将方程(6)~(8)代入方程(4),可得
(9)
当不考虑杆件柔性,即小变量ε=0时,将h1带入方程(3),可得慢速子系统微分方程为
(10)
根据积分流形,快速子系统变量偏差可表示为
(11)
将式(11)乘ε,对其求导并代入方程(6),同时根据方程(9),对hij进行替代,得快速子系统方程:
(12)
针对慢速与快速两个子系统,设计如图3所示的复合控制算法.对于慢速子系统,将采用反演控制,实现对刚体末端运动的跟踪控制,同时根据速度映射关系,建立杆件弹性变形及振动量与动平台弹性位移的映射关系,根据刚体运动及弹性位移建立动平台运动表达式,并通过设计校正力矩τ1与τ2实现对弹性位移补偿.对于快速子系统将,采用滑模控制,保证流形成立.考虑到杆件曲率变化率难于测量,设计高增益观测器,根据曲率值对曲率变化率进行估计.
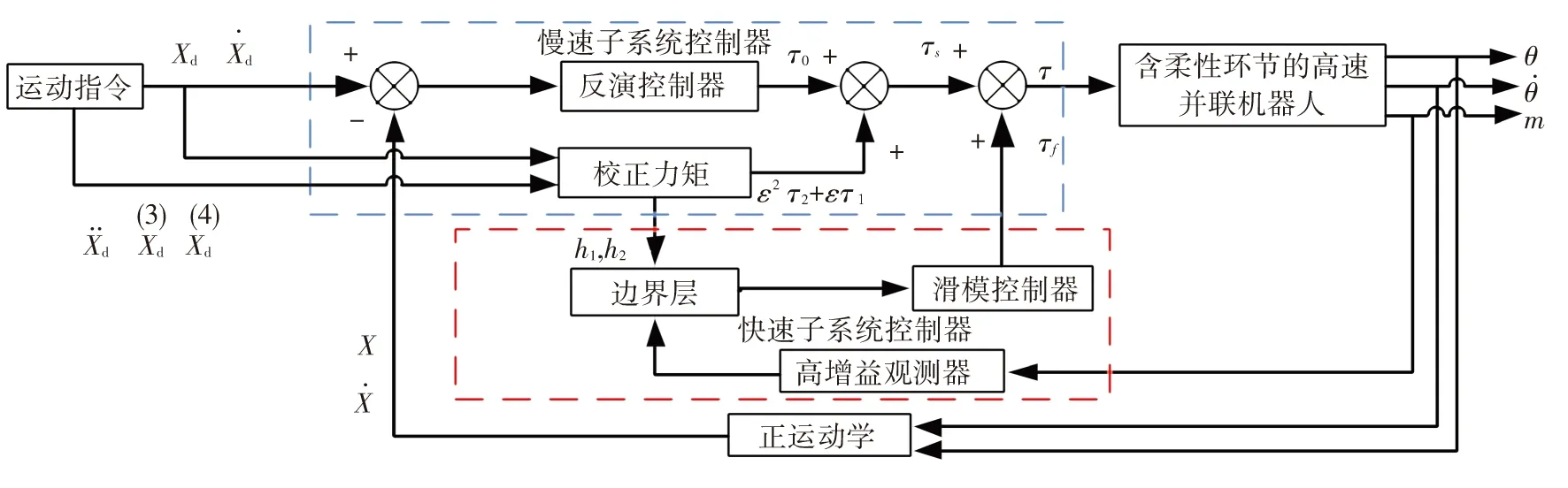
图3 复合控制框图
3 基于反演算法的慢速子系统控制
反演控制是针对复杂非线性系统的递推控制算法,将原系统分解为不超过系统阶数的子系统,通过逐级建立各子系统Lyapunov函数来设计控制率,同时保证系统的稳定性[19].首先定义位置误差
e1=X1-Xd,
式中Xd为指令信号,定义虚拟控制量
其中c1为大于零的常数,同时速度误差e2可定义为
e2=X2-υ1.
(13)
根据位置误差定义Lyapunov函数
(14)
对式(14)求导得
(15)

(16)
对式(16)进行求导,并对相关参数进行替代,可得


(17)
根据式(17)可得


(18)
其中c2为正实数,将式(18)导入方程(17),可得
因此根据Lyapunov稳定性原理,在τ0作用下,慢速子系统是稳定的.由于弹性环节的存在,并联机器人末端位置可表示为
r=X1+f3(η,h10,h11,h12,ε).
(19)
其中f3为杆件弹性变形与振动对动平台中心G产生的弹性位移,即末端动平台的弹性位移.
根据速度映射关系,弹性运动部分产生的动平台加速度可表示为

本文考察的柔性环节都在小变形范围内,因杆件弹性位移产生的动平台末端弹性位移f3可简化为
(20)


(21)
(22)
根据方程(22),定义Lyapunov函数
(23)
对式(23)求导可得



令ε及ε2的系数项为零,可得校正力矩为
(24)

4 基于滑模变结构的快速子系统控制
定义新的时间尺度tf=t/ε,快速子系统微分方程(12)可表示为
第2个方程后两项含小参数ε,相对于其他项其控制量较小,可以将其视为扰动,因此扰动项可表示为


由于扰动项的存在,快速子系统采用滑模变结构控制,选择滑模面为
其中K1为正数,对滑模面求导得
根据滑模面,定义Lyapunov函数为
V4=0.5STS.
求导可得

(25)
根据式(25),取快速子系统控制律为

KfS+Δ1sgn(S)).
(26)
其中sgn(·)为符号函数,将式(26)代入式(25)得


由此可知,在式(26)作用下,快速子系统是收敛的.符号函数会对系统产生抖动,为了降低抖动的产生,将饱和函数sat(·)代替符号函数,饱和函数可定义为[20]
其中Δ2为缓冲层.
5 曲率变化率高增益观测器
为避免对曲率变化率直接测量,本文设计高增益观测器,通过测量得到的曲率观测曲率变化率.由方程(11)可知,快速子系统变量Xf1对应曲率值,可以通过测量应力直接换算得到,Xf2对应曲率变化率,为观测器观测值,根据文献[21]、[22]与式(4),观测器可表示为
(27)

为证明系统稳定性,定义新的误差变量为
(28)
将式(28)代入式(27),状态观测器可表示为
(29)

其中P1为正定对称矩阵,求导可得

由于A0为Hurwitz矩阵,存在正定矩阵P1,使



(30)
(31)
(32)

根据误差方程(32),可定义Lyapunov函数
V6=εξTPξξ.
(33)
其中Pξ为对称正定矩阵,式(33)求导可得
(34)
由于Aξ11与A0均为Hurwitz矩阵,对于给定的对称正定阵Sξ,存在对称正定矩阵Pξ满足
(35)
根据Rayleigh-Ritz不等式可知:
(36)

(37)

(38)
(39)
6 系统稳定性证明
各子系统稳定性并不能保证系统整体稳定性,因此需要综合各子系统对系统整体稳定性进行证明.将式(9)、(18)、(24)分别代入动力学式(3)可以得系统误差方程为

式中:



根据误差方程,定义整体系统的Lyapunov函数为
(40)
其中Ps与Pξ为对称正定矩阵,对式(40)求导得


(41)
由于As为Hurwitz矩阵,对于给定的对称正定阵Ss,存在对称正定矩阵Ps满足以下条件:
(42)
根据Rayleigh-Ritz不等式可知
(43)
(44)
(45)
(46)

(47)
λmin(Ss)(λmin(Sξ)-2(χ6+χ7ε+χ8ε2)-
χ2ε)-(χ3+χ4ε+χ5ε2)2≥0.
忽略O(ε2)高次项的影响,小参数ε的最大值满足
由式(47)可知,当ε的取值满足0<ε≤εmax时,整体系统是稳定的.
7 算法仿真
为对本文提出的复合控制进行验证,将其与奇异摄动控制及仅考虑刚体动力学模型的反演控制进行对比,上述算法仿真在MATLAB软件的SIMULINK模块下开展,并选用ode15s积分器.由式(24)可知,在基于积分流形与观测器的复合控制算法中,动平台末端位姿的期望轨迹需满足四阶导数连续,为减小期望轨迹在起始与末端点对系统的冲击,期望轨迹采用式(48)所示的九次多项式规划,保证起始与末端点处的速度、加速度、三阶与四阶导数为零.
(48)

为描述末端性能,引入平均误差,定义为
其中CR为末端动平台3个方向的性能指标,tM与rM分别为平动方向平均误差与转动方向平均误差.
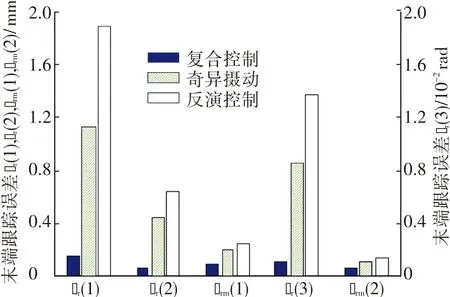
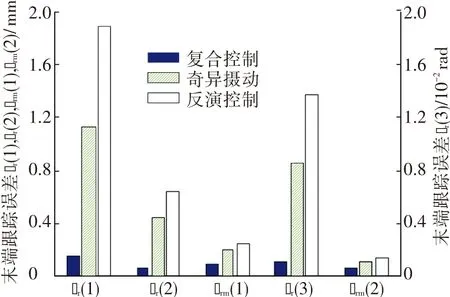
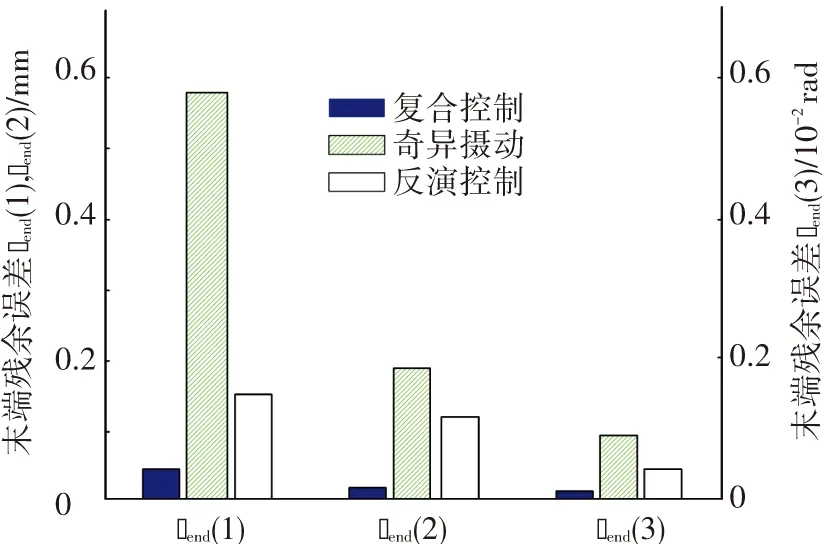
根据式(20)可计算动平台弹性位移f3.vi与vm分别表示运行过程中动平台各方向的最大弹性位移及平动与转动方向的平均弹性位移,vend表示终点时刻弹性位移即残余振动.对于相同的期望输入,动平台弹性位移的大小可反映复合、奇异、反演3种控制算法的振动抑制效果.各方向的弹性位移见图4与5.
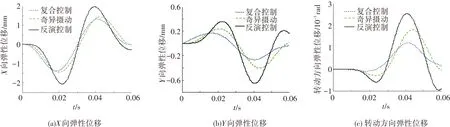
图4 动平台瞬时弹性位移
(a) 各向弹性位移

(b) 动平台残余振动
可以看出,奇异摄动与反演控制相比,各方向的最大弹性位移幅值都下降了28%以上,复合控制与奇异摄动相比下降了4.75%、33.42%与33.52%.反演控制及奇异摄动平动方向的平均弹性位移,分别为1.579、1.112 mm,复合控制则下降到0.970 mm;对于转动方向,从反演控制及奇异摄动的0.001 4 rad及9.863×10-4rad下降到复合控制的6.872×10-4rad,复合控制在两个方向上弹性位移都下降了14%以上.与反演控制相比,复合控制与奇异摄动的残余振动都有较大幅度降低,且两种算法都接近于0.
跟踪误差为末端的实际输出与期望输出的差值.tr表示动平台各方向的最大跟踪误差,trm表示平动与转动方向的平均跟踪误差,tend表示终点时刻的跟踪误差.
由图6、7可知,与奇异摄动及反演控制器相比,基于积分流形与观测器的复合控制在轨迹跟踪方面具有明显的优势.对于最大跟踪误差,X方向分别下降了85.56%与91.41%,Y方向分别下降了57.55%与90.57%,转动方向分别下降了53.34%与61.5%;对于平均跟踪误差,平动方向分别下降了88.2%与92.62%,转动方向分别下降了37.26%与49.57%;在终点时刻跟踪误差方面,X方向分别下降了92.8%与72.34%,Y方向分别下降了89.73%与83.62%,转动方向分别下降了85.96%与70.85%.对于终点时刻跟踪误差,奇异摄动方法与反演控制器相比在各方向都明显变差,主要是因为奇异摄动算法只考虑了振动抑制,由于调节的延迟,在实现振动抑制时末端点轨迹跟踪性能变差.
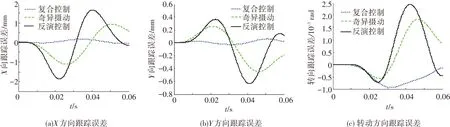
图6 动平台末端瞬时跟踪误差
(a) 各方向跟踪误差
(b) 终点时刻
8 结 论
1)基于积分流形将刚柔耦合动力学模型降解为快速与慢速子系统,采用滑模控制与反演控制分别设计快、慢子系统控制器,并对机器人末端的弹性位移进行补偿,同时采用高增益观测器对曲率变化率进行估计,进而实现高速并联机器人的轨迹跟踪控制.
2)选取Lyapunov函数,证明了慢速子系统、快速子系统、高增益观测器及整体系统的渐进稳定性,给出了积分流形与观测器中小参数选取条件.
3)Matlab-Simulink仿真结果表明,复合控制算法在振动抑制与轨迹跟踪方面均具有明显优势.
[1] PIETSCH I, KREFFT M, BECKER O, et al.How to reach the dynamic limits of parallel robots? An autonomous control approach[J].IEEE Transactions on Automation Science and Engineering , 2005, 2(4): 369-380.
[2] DWIVEDY S, EBERHARD P.Dynamic analysis of flexible manipulators, a literature review[J].Mechanism and Machine Theory, 2006, 41(7): 749-777.
[3] LI Yongming, TONG Shaocheng, LI Tieshan.Adaptive fuzzy output feedback control for a single-link flexible robot manipulator driven DC motor via backstepping[J].Nonlinear Analysis: Real World Applications, 2013, 14(1): 483-494.
[4] VAKIL M, FOTOUHI R, NIKIFORUK P.Causal end-effector inversion of a flexible link manipulator[J].Mechatronics, 2009, 19(7): 1197-1210.
[5] MOALLEM M, PATEL R, KHORASANI K.Nonlinear tip-position tracking control of a flexible-link manipulator: theory and experiments[J].Automatica, 2001, 37(11): 1825-1834.
[6] LIZARRAGA I, ETXEBARRIA V.Combined PD-H∞approach to control of flexible link manipulators using only directly measurable variables[J].Cybernetics & Systems, 2003, 34(1): 19-31.
[7] ZHANG Q, MILLS J, CLEGHORN W, et al.Trajectory tracking and vibration suppression of a 3-PRR parallel manipulator with flexible links[J].Multibody System Dynamics, 2015, 33(1): 27-60.
[8] EL-BADAWY A, MEHREZ M W, ALI A R.Nonlinear modeling and control of flexible-link manipulators subjected to parametric excitation[J].Nonlinear Dynamics, 2010, 62(4): 769-779.
[9] SUBUDHI B, MORRIS A.Soft computing methods applied to the control of a flexible robot manipulator[J].Applied Soft Computing, 2009, 9(1): 149-158.
[10]KHORASANI K.Adaptive control of flexible-joint robots[J].IEEE Transactions on Robotics and Automation, 1992, 8(2): 250-267.
[11]MOALLEM M, KHORASANI K, PATEL R.An integral manifold approach for tip-position tracking of flexible multi-link manipulators[J].IEEE Transactions on Robotics and Automation, 1997, 13(6): 823-837.
[12]SALMASI H, FOTOUHI R, NIKIFORUK P.A manoeuvre control strategy for flexible-joint manipulators with joint dry friction[J].Robotica, 2010, 28(4): 621-635.
[13]VAKIL M, FOTOUHI R, NIKIFORUK P.Application of the integral manifold concept for the end-effector trajectory tracking of a flexible link manipulator [C]//Proceedings of the 26th American Control Conference.New York: IEEE, 2007: 741-747.
[14]VAKIL M, FOTOUHI R, NIKIFORUK P.End-Effector Trajectory Tracking of a Class of Flexible Link Manipulators [C]// Proceedings of 32nd Annual Mechanisms and Robotics Conference.New York: ASME, 2008: 1085-1094.
[15]VAKIL M, FOTOUHI R, NIKIFORUK P.End-effector trajectory tracking of a flexible link manipulator using integral manifold concept[J].International Journal of Systems Science, 2011, 42(12): 2057-2069.
[16]VAKIL M, FOTOUHI R, NIKIFORUK P.Maneuver control of the multilink flexible manipulators[J].International Journal of Non-Linear Mechanics, 2009, 44(8): 831-844.
[17]CHEN Z, KONG M, JI C, et al.An efficient dynamic modelling approach for high-speed planar parallel manipulator with flexible links[J].Journal of Mechanical Engineering Science, 2015, 229(4): 663-678.
[18]GORIUS T, SEIFRIED R, EBERHARD P.Approximate end-effector tracking control of flexible multibody systems using singular perturbations[J].Journal of Computational and Nonlinear Dynamics, 2013, 9(1): 011017.
[19]ZHU Ge, LEE T, GE S.Tip tracking control of a single-link flexible robot: A backstepping approach[J].Dynamics and Control, 1997, 7(4): 341-360.
[20]LEE S, LEE C.Hybrid control scheme for robust tracking of two-link flexible manipulator[J].Journal of Intelligent & Robotic Systems, 2001, 32(4): 389-410.
[21]HEREDIA J, YU Wen.A high-gain observer-based PD control for robot manipulator [C] //Proceedings of the 2000 American Control Conference.Chicago: IEEE,2000: 2518-2522.
[22]MOSAYEBI M, GHAYOUR M, SADIGH M.A nonlinear high gain observer based input-output control of flexible link manipulator[J].Mechanics Research Communications, 2012, 45: 34-41.
(编辑 杨 波)
Trajectory tracking control of parallel manipulator with integral manifold and observer
KONG Minxiu, CHEN Zhengsheng, LIU Ming, JI Chen
(School of Mechatronics Engineering, Harbin Institute of Technology, Harbin 150001, China)
In view of the problem that flexible displacement will occur for end-effectors of parallel manipulators when operating at a high speed, taking the 3RRR parallel manipulator as the object, the trajectory tracking composite controller based on the integral manifold and high-gain observer is proposed for flexible parallel manipulators.Based on the stiffness matrix, the small variable is introduced to decomposite the rigid-flexible coupling dynamic model of the parallel manipulator into slow subsystem and fast subsystem.For the slow subsystem, the backstepping control is applied for rigid motion tracking of the end-effector.To avoid the influence of the links’ flexible displacement comprised of deformation and vibration on the end-effector’s motion trajectory, the corrective torque is deduced, and the compensation for the flexible displacement is realized.For the fast subsystem, the sliding mode control is utilized to suppress the vibration.At the same time, the high gain observer is designed to avoid the measurement of curvature rate of the flexible links.Also, the stability of the overall system with the proposed method is proven with the Lyapunov stability theorem and the upper bound of the small variable is obtained.At last, the proposed composite controller together with the singular perturbation control and the rigid model based on backstepping control are simulated, and the vibration suppression and tracking accuracy performances are compared to validate the proposed control scheme.
parallel manipulator; integral manifold; high-gain observer; composite control; sliding mode control; backstepping control; vibration suppression
10.11918/j.issn.0367-6234.2017.01.005
2015-08-11
国家自然科学基金(51075086)
孔民秀(1972-),男,副教授; 刘 明(1956-),男,教授,博士生导师
陈正升,zschen88200@163.com
TP242
A
0367-6234(2017)01-0037-09
