工业机器人教学之机电方向
2017-01-24陈庆军
陈庆军

摘 要: 本文根据工业机器人教学的特点,分析了传统工业机器人教学的现状, 从基本课程内容和教学方法入手,提出理论结合实际的教学方法。并以取货机器人为例,详细论述的机电方向的工业机器人教学方案,采用教学任务逐步分解的方法,提高学生的主观能动性,训练学生的实际技能。
关键词:工业机器人;教学;机电;控制
DOI:10.16640/j.cnki.37-1222/t.2017.01.021
1 引言
目前,工业机器人正在全世界迅猛发展,中国的工业机器人市场也是一片欣欣向荣的景象。要实现“机器人替代人”除了需要先进的科学技术和制造工业技术之外,还需要一大批掌握工业机器人应用技术的专业性技术人才。与工业机器人结合最为紧密的专业,毫无疑问就是机电专业,工业机器人技术囊括了机械设计、机械制造和电子控制等几大专业。所以对于工业机器人教学,我们要把握准方向,要以机电方向为主,配合其他相关专业,真正的做到理论联系实际,培养出合格的工业机器人应用型人才。
2 工业机器人教学的基础课程
机器人学是一门综合了机械学、控制理论、电子学和力学的交叉性前沿学科。要想真正掌握工业机器人的应用技术,必须贮备一定理论的知识,否则仅仅是一名工业机器人操作工,而无法进一步的提升自我。工业机器人机电方向的基础核心课主要有机械工程制图、机械设计、机械原理、电子信息技术、机械控制理论、材料力学、理论力学和有限元分析等。机械工程制图是一切机械设计制造的基础,能绘制和看懂机械工程图是一个合格工业机器人应用工程师的基本能力。作为工业而机器人的使用者,不能仅仅关注机器的操作和使用,应当去探寻其实现的原理和方法。机械设计和机械原理很好为我们提供了这方面的途径。
3 工业机器人教学方法
工业机器人课程是兼具理论性和实践性的课程,对学生的要求不仅仅局限于对工业机器人本体机构和编程控制的了解,还起到培养学生创新性的作用。目前,各大本科及专科院校,对工业机器人的教学主要存在以下几点缺陷:
(1)课程进度快,内容抽象,学生理解困难。当前教学多运用多媒体教学,用幻灯片替代了以前板书,缺乏对机械理论的分析和公式的推导过程。虽然提高了教师的授课效率,但增加了学生理解的难度和较少了学生的思考时间。
(2)缺乏教学重点,知识点零星分散,学生难以从总体感知上有一个主观认识。首先,工业机器人教学既需要学习机器人的总体结构,还需要学习运动学、传动与驱动等,容易使学生产生迷惑,难以抓住重点。其次,工业机器人课程涉及到坐标方程变换、运动学方程及其推导、有限元的刚度矩阵计算和力雅克比与静力计算等,这一部分公式复杂、推导繁琐,是学生最缺乏耐心和兴趣的部分,但恰恰是这部分,才是这门课程的核心。
(3)教师主要是以理论讲解为主,缺少学生实际动手能力的锻炼。一方面,工业机器人设备昂贵,一般普通院校无力承担此费用;另一方面,即使开设实验课程也难以全方位覆盖全体学生,更不用说让学生独立完成工业机器人的设计任务。
针对工业机器人教学中所出现的问题,提出以下几点:1)明确工业机器人教学的核心任务。为了避免由于学科交叉对学生产生的困惑,可以以某一类型的工业机器人为参照,着重分析讲解,此类工业机器人的机械本体结构、运动方式、驱动原理、逻辑控制原理和末端轨迹规划等。通过此类工业机器人,使学生对机器人有一个全面的认识,关联所学的力学、电学等其他相关专业的知识,激发学生对工业机器人的兴趣。2)多媒体课件的内容仅仅是书本内容的提炼而已,难以提高学生的学习积极性。教师应当利用虚拟仿真技术和三维设计软件等工具,更加直观的表现工业机器人。比如,利用PROE、SOLIDWORKS和UG等三维设计软件绘制出某类型工业机器人的装配图和主要零部件图,使学生更加直观的认识机器人机构;利用前面建立的三维模型,运用ADAMS软件,对工业机器人的运动进行运动学分析。虚拟运动仿真与控制动画演示,让学生了解工业机器人真实的运动方式。3)由于经费和其他原因,工业机器人教学往往理论传授多于实验模拟。各大中专院校,应积极寻求与企业合作机会,以企业需求为导向,培养适合企业要求的应用型工业机器人人才。
4 工业机器人教学案列
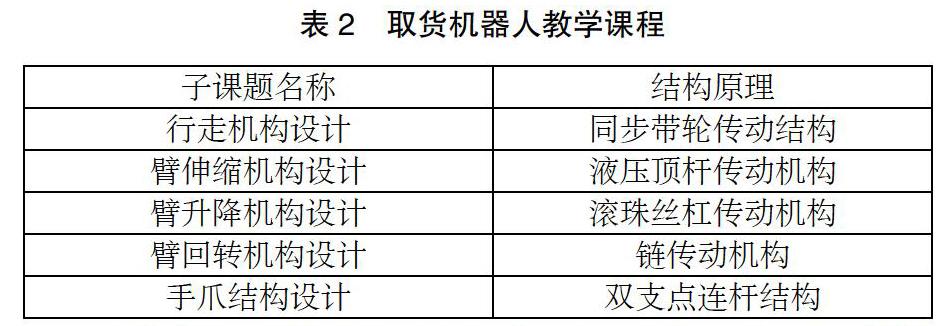
如图1所示,取货机器人由四自由度组成,分别为行走自由度(Y方向)、臂伸缩自由度(X方向)、臂升降自由度(X方向)、臂回转自由度和爪张开自由度。将取货机器人分为五个子课题,分别选取不同专业学生进行设计,如表2所示。
通过将取货机器人结构的分解,将复杂问题简单化,待五组课题全部完成后,各小组之间相互学习,了解取货机器人的整体工作流程。 在老师的指导下,完成最后的总装配工程,用ADAMS软件,对工业机器人的运动进行运动学分析,虚拟运动仿真与控制动画演示,达到虚拟仿真的目的。此外,取货机器人在各大汽车厂使用较为普遍,通过校企联合的方式,组织学生实地考察,进一不了解取货机器人的工作环境和使用方法,做到理论联系实际。通过设计加考察的途径,加深学生对取货机器人的理解,使其不仅仅是工业机器人的“操作工”,更是工业机器人的应用专家。
5 结论
本文首先介绍工业机器人教学所需要的理论课程,其次分析传统工业机器人教学中存在的问题并创新性的提出交互式的教学方法,最后以取货工业机器人为案例进行分析。
参考文献:
[1]李华强.基于虚拟样机技术在《工业机器人》课程教学实践[J]. 教学实战,2015(21):98-102.
