GeoSwath Plus在高桩码头桩基基础监测中的应用
2017-01-12雷力军别伟平
雷力军,别伟平,王 頔
(中交第一航务工程勘察设计院有限公司,天津 300222)
GeoSwath Plus在高桩码头桩基基础监测中的应用
雷力军,别伟平,王 頔
(中交第一航务工程勘察设计院有限公司,天津 300222)
本文主要介绍了GeoSwath Plus相干多波束系统的工作原理、技术参数,并将其应用在高桩码头桩基基础监测中,系统的介绍了其具体操作流程,生成三维地形地貌图,在地形图中清楚地显示水深相对高差厘米级的地形起伏,能较为清楚地显示各种水工建筑对于高桩码头不同形式改造的痕迹。在实际应用中展示出了GeoSwath Plus相干多波束系统较其他常规多波束系统的高精度优势,为GeoSwath Plus相干多波束系统在基础监测中的应用提供参考借鉴。
GeoSwath Plus;相干多波束系统;水深测量;高桩码头监测
引 言
近年来,随着现代技术飞速发展,多波束探测技术作为一种高效率的海底地形测量技术在国内海洋基础勘测中逐渐发展成熟[1~3]。该技术由声学技术、计算机技术、导航定位技术和数字化传感器技术等多种技术高度集成,通过多组阵和广角度发射与接收,形成条幅高度水深数据。多波束探测系统按照工作原理可分为2种:1)电子多波束测深系统,基于特定角度下,测量反射信号的往返时间获取不同角度的水深数据;2)相干多波束测深系统,基于特定时间下,测量反射回波信号的角度获取斜距或角度测量的结果[4]。GeoSwath Plus(多波束测深系统)即为相干多波束测深系统,其基于相位测量技术的系统较常规波束形成的多波束系统,在角度分辨率方面具有巨大的优势。基于其浅水高分辨水下地形测量的特点,在某工程项目中,选取GeoSwath Plus(多波束测深系统)开展高桩码头桩基基础监测。
1 工作原理及技术参数
GeoSwath Plus是GeoAcoustics公司集合水下声纳技术和换能器技术、数字信号处理(DSP)技术为浅水高分辨水下地形测量开发的基于 PC的、轻便型多波束条带测量系统。该系统由发射接收处理系统、数据采集及实时处理系统、数据后处理系统和外围辅助设备组成(图1)。GeoSwath Plus多波束测深系统共配备2个换能器阵,呈V型结构,每个换能器由1个发射单元(或阵列)和4个接收单元组成,发射单元(或阵列)产生极窄的扇形声学波束短脉冲,接收元件测量特定时间下声呐脉冲的返回角度。利用电子技术计算垂面上的相位变化,通过相位,确定反射(散射)声波的接收角度和返回脉冲的用时,根据不同接收换能器信号间的时间差(相位差)计算得到信号的角度,从而得到斜距或角度的测量结果[5~6]。其技术参数如表1所示。

图1 GeoSwath Plus多波束测深系统组成示意
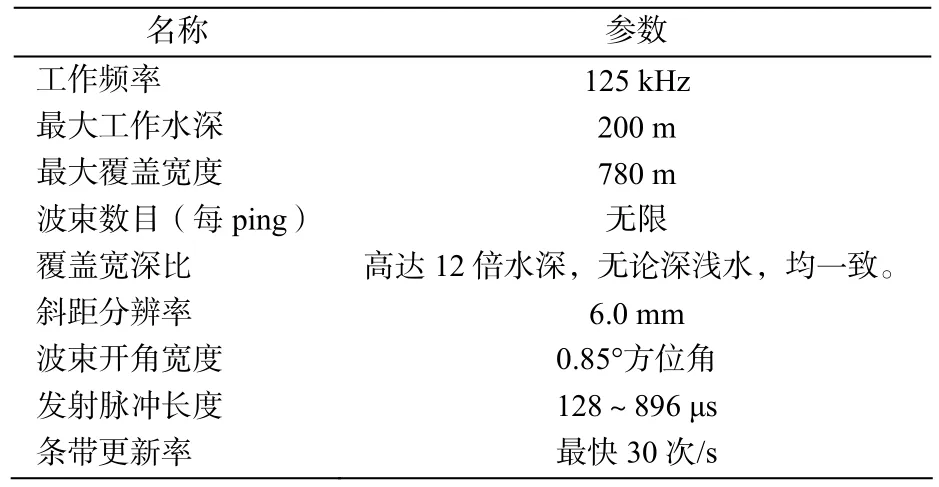
表1 GeoSwath Plus多波束测深系统参数
2 高桩码头桩基基础监测
2.1 项目概况
某港区水下地形测量工作,为了查明由于码头及引桥等水工建筑物的建设施工对桩基基础所在处的泥面的冲刷程度,采用GeoSwath Plus多波束测深系统进行水下地形测量。测量面积约0.6 km2,测区为不规则形长条形航道(图2)。

图2 研究区示意
2.2 设备安装与参数校准
2.2.1 GeoSwath Plus多波束测深系统安装
GeoSwath Plus多波束测深系统安装测量船上。多波束测深仪的声纳换能器安装在测量船的左舷;GPS定位仪的天线盘安装在声纳换能器安装杆的顶端;TSS Meridian电罗经安装在测量船的中轴线附近,TSS DMS-05三维运动传感器安装在厂家提供的V型架固定位置与声纳换能器成为一体;多波束系统安装以声纳换能器安装杆与海水面交点作为参考原点建立船体坐标系,定义船艏方向为X轴正方向,左侧船舷方向为Y轴正方向,垂直向上为Z轴正方向,量取各传感器相对于参考原点的位置,往返各量一次,取其中值。求得各传感器相对位置均值如表2所示。

表2 各传感器相对位置均值
2.2.2 GeoSwath Plus多波束测深系统校准
选择在海底特征明显区域进行。在选择的区域内布设3条测线,布线间距为设备覆盖扫测宽度的1/2~2/3,如图3所示。

图3 校准测线分布示意
测量船以约5.5 kn的速度分别按1-2、4-3、5-6方向沿测线航行。测线1-2和4-3是校准右侧声纳探头(starboard)的Roll、Pitch和Yaw值,而测线4-3和5-6是校准左侧声纳探头(Port)的Roll、Pitch和Yaw值,经过多组校准参数数据的求取与比对,取最优组合参数对仪器进行设置然后进行数据后处理。
本次工程中GeoSwath Plus 声纳换能器安装2次,固定后进行校准测试,校准测定均值结果如表3所示。

表3 校准测定均值结果
工程使用多波束测深系统已通过同步采集GPS的ZDA(Time and Date)数据和1 PPS(pulse per second)数据,多波束系统时间同步GPS内部时钟,因此多波束测深系统无GPS时间延迟改正。
2.3 水深测量
测区北高南低,栈桥接岸处地面高程为5 m,码头前沿高程约-11 m,等深线呈东西顺岸分布。工程中使用的 GeoSwath Plus多波束测深仪的波束开角宽0.85°,最大扫测宽度为水深的10~12倍。为保证同一条断面扫测宽度保持一致,相邻断面衔接不出现漏扫区域,断面按东西向布设,单侧扫测宽度按照4.0倍水深设置。测深作业时,使用GPS RTK接收机输出导航和定位数据;使用GS+软件采集GeoSwath Plus多波束测深数据,对预定测区进行了全覆盖扫海测量。同时使用声速仪进行了多波束换能器位置的表面声速测定和测区声速剖面的测定。
2.4 水深数据处理
使用GS+软件中的“Calibration”功能,求取多波束系统的安装校准参数数据。使用 GS+软件对每条断面多波束原始数据进行“Navigation”和“Attitude”编辑,进行潮汐改正、声速改正、数据滤波(分为振幅滤波、范围滤波、横向滤波和纵向滤波 4种滤波模式),生成“Swath”文件,由“Swath”文件生成0.5 m×0.5 m网格的“Grid”文件,最后由“Grid”文件输出ASCⅡ.XYZ格式的坐标文件,再经数据抽稀,最终生成满足绘图水深图要求的水深点数据文件。
2.5 GeoSwath Plus多波束相邻条带重叠比对
GeoSwath Plus多波束相邻条带数据采集重叠率达40 %,通过GS+软件的“difference”功能计算相邻条带重叠数据的“Standard Deviation”(标准差),差值分布在±0.07~±0.25 m之间,水深符合情况良好。
2.6 测量结果分析
将水深数据利用Surfer 9软件生成的引桥及码头桩基处水下三维地形地貌图进行对比分析,得出其桩基分布与三维地形地貌(图4、图5)。

图4 桩基分布

图5 三维地形地貌
对比分析可以发现,桩组YZ1和YZ2基础处泥面无冲刷现象;桩组YZ3下形成直径约15 m
的圆形冲坑,最低水深为-1.4 m;桩组YZ4下形成直径约18 m的圆形冲坑,最低处水深为-1.3 m;桩组YZ5下形成直径约25 m的椭圆形冲坑,最低处水深为-2.0 m;桩组YZ6下形成直接约13 m的圆形冲坑,最低处水深为-0.4 m;桩组YZ7下最低处水深为-2.4 m,周边水深约为-1.5 m;桩组YZ8下最低处水深为-5.4 m,周边水深约为-3.5 m;桩组YZ9下最低处水深为-7.3 m,周边水深约为-5.5 m;桩组YZ10下最低处水深为-8.9 m,周边水深约为-6.6 m;补偿器墩6、补偿器墩7和次固定墩7三个桩基间形成-10 m冲坑,最低处水深为-12.9 m;系缆墩1下最低处水深为-8.1 m,周边水深约为-7.5 m;系缆墩2下最低处水深为-8.4 m,周边水深约为-7.5 m;靠船墩1和靠船墩2之间形成-11 m等深线,最低处水深为-12.4 m;系缆墩3下最低处水深为-9.7 m,周边水深约为-9.0 m;系缆墩 4下最低处水深为-11.2 m,周边水深约为-9.5 m。
3 结 语
本工程采用GeoSwath Plus多波束测深系统对测区进行了全覆盖、无遗漏、高精度的扫海测量,对码头及引桥桩基基础处泥面地形状况有了一个比较全面扫测,为考察实际冲刷情况提供了详实、可靠的基础数据。GeoSwath Plus多波束测深系统在此工程中的应用在海底地形分辨率达到了厘米级,显示出了其巨大的浅水高分辨水下地形测量优势,系统在经过各种校准后,对水深变化在几米到十几米的高桩码头进行了测量,在局部地形图中清楚地显示了水深相对高差厘米级别的坑洼地形,直径由几米到二十几米的近圆形地形起伏,清晰又直观的显示出了码头及引桥等水工建筑物的建设对与桩基基础所在处的泥面造成冲刷现象。
[1]李珍,台树辉.条带测深仪在小浪底泥沙淤积测验中的应用[J].人民长江,2005,36(10):44-45.
[2]王志东.GeoSwath条带测深仪原理探析及其应用[J].水运工程,2002,345(10):31-33.
[3]刘忠臣,周兴华,陈义兰,等.浅水多波束系统及其最新技术发展[J].海洋测绘,2005,25(6):67-70.
[4]GeoSwath Plus中潜水多波束条带测深综合测量系统技术文件[R].青岛:青岛海洋研究设备服务公司.
[5]刘东,王朝.两种多波束系统差异对比分析[J].港工技术,2014,51(1):57-59.
[6]刘方兰,肖波,罗伟东,等.GeoSwath多波束系统及其在航道测量中的应用[J].测绘工程,2009,18(4):49-54.
Application of GeoSwath Plus in Foundation Monitoring of Piled Berth Structure
Lei Lijun,Bie Weiping,Wang Di
(CCCC First Harbor Consultants Co.,Ltd.,Tianjin 300222,China)
An introduction is given to the operational principle and technical parameters of GeoSwath Plus coherent multi-beam system.The foundation of piled berth structure has been monitored by using the system,and the detailed operational process is described systematically.The system generates 3D terrain geomorphologic map which clearly shows the topographic relief with relative water-depth difference in the range of centimeter as well as the signs that piled berth structure is affected by various maritime structures.The practice shows the high-precision advantage of GeoSwath Plus coherent multi-beam system in comparison with other conventional multi-beam systems.The research results will provide a reference for the application of GeoSwath Plus coherent of multi-beam system in the foundation monitoring.
GeoSwath Plus; coherent multi-beam system; bathymetry; monitoring piled berth structure
TU473.1+6;U656.1+13
:A
:1004-9592(2016)06-0092-04
10.16403/j.cnki.ggjs20160623
2016-04-25
雷力军(1980-),男,工程师,主要从事工程测量方面工作。
