基于DOE的多轴转向系统灵敏度分析
2017-01-11李陆浩左霞杨波李辰张军伟张辉
李陆浩+左霞+杨波+李辰+张军伟+张辉

摘 要:多轴转向系统采用转向臂与拉杆传递空间运动,各轴间转向车轮转角关系受一系列铰点位置影响。通过试验设计(Design of Experiment,DOE),建立转向系统动力学仿真模型,分析转向系统中各铰点在传递转向运动关系中的灵敏度。结果表明,边拉杆与梯形臂铰点垂向位置、摆臂横拉杆铰点横向位置、侧拉杆铰点横向位置、垂臂纵拉杆铰点垂向位置对转向系统运动关系有显著影响,为多轴转向系统设计与优化提供了依据。
关键词:多轴转向系统;试验设计;灵敏度分析;重型汽车;ADAMS/Insight
中图分类号:U463.4 文献标文献标识码:A文献标DOI:10.3969/j.issn.2095-1469.2016.06.07
Abstract:The multi-axle steering system adopts the steering arm and the pull rod to transmit the space motion, and the steering wheel rotation angle between the two axes is influenced by a series of hinge positions. In this paper, based on the design of experiment, the dynamic simulation model of the steering system was established, and the sensitivity of the hinge points in the steering system was analyzed. The analysis results show that the vertical position of the hinge point between the side pull rod and trapezoidal arm, the horizontal position of the swing arm tie rod joint, the lateral position of the side rod hinge point and the vertical position of hinge point at the pitman arm longitudinal rod have significant effects on the steering system motion. The paper provides a basis for multi-axle steering system design and optimization.
Keywords:multi-axle steering system; design of experiment; sensitivity analysis; heavy duty vehicle; adams/insight
重型特种车转向系统采用转向臂与拉杆传递空间运动,使各转向车轮具有理想运动关系即阿克曼转向几何关系。为保证各转向车轮在整个转向范围内较好地满足上述条件,对转向杆系各铰点精度通常要求较高。而实际结构在生产、装配及使用过程中会受到各种不确定因素的影响,使转向铰点无法得到精确控制。尤其是高灵敏度参数的微小变化,将导致车辆转向时,转向轮不能作纯滚动运动,从而产生通过性差、轮胎异常磨损等问题,严重时影响车辆操纵稳定性与行驶安全性[1-5]。
因此,良好的多轴转向系统设计应通过参数组合优化,避免选取参数的高灵敏度区间,选择灵敏度小的参数组合控制输出参数的波动,并同时考虑设计组合使输出参数满足设计指标要求,以得到既能满足设计要求又能使系统输出对不确定因素不敏感的设计值。同时,在生产、装配、使用过程中,应将高灵敏度参数作为系统关键参数进行控制,将系统响应控制在一定范围内。
多轴转向系统设计参数的灵敏度分析是以上工作的基础。本研究首先利用ADAMS/View软件,建立某多轴转向系统运动学仿真模型,然后在ADAMS/Insight中采用DOE法,选取设计参数、确定试验目标,对多轴转向系统铰点进行灵敏度分析。
1 多轴转向系统ADAMS模型
该五轴重型特种车底盘采用一、二、四、五桥转向,转向器摇臂和一桥转向车轮之间设置转向直拉杆机构,传递转向器与转向车轮间的运动;各转向桥间设置垂臂及纵拉杆机构,传递各转向桥间的运动;各转向桥左、右车轮间设置断开式转向梯形机构,传递左右侧转向轮间的运动。
以车轮跳动过程中车轮前束角变化小、各桥转向轮间运动关系满足阿克曼转向几何关系为目标[1],利用空间机构法建模,优化计算得到一组转向系统铰点。在ADAMS / View中,利用车辆基本参数与优化得到的硬点,建立多轴转向系统多体动力学模型,其中摆臂支点、垂臂支点与车架间采用旋转副约束,拉杆与摆臂、垂臂连接球面副约束,在转向器摇臂处施加运动驱动,模型如图1所示。
模型坐标系原点为一桥中心线与整车纵向对称面的交点,x轴为底盘对称轴,指向底盘前部为正;z轴垂直于车架表面,向上为正;y轴由右手定则确定。
2 DOE法灵敏度分析
DOE法可以在考虑多个设计参数发生变化的同时,通过设计分析目标,观察系统响应的变化情况。应用统计学方法,对试验结果进行分析,识别对系统响应影响相对大的因素,即分析设计参数的灵敏度 [3]。
利用DOE法进行灵敏度分析一般包含试验目标确定、设计因素选取及变化水平确定、正交试验和灵敏度确定等步骤。基于DOE的多轴转向系统灵敏度分析流程如图2所示[2]。
2.1 试验目标
对于采用双横臂独立悬架与断开式转向梯形的底盘,转向主销为上、下悬架横臂外铰点连线。行驶过程中,车轮跳动将带来转向主销位置变化,主销后倾角与内倾角均会发生变化,从而带来车轮前束角的变化。同时,转向边拉杆外铰点随车轮跳动,带动边拉杆摆动,同样导致车轮前束角变化。因此,本研究选取前束角变化最小为车轮空间运动灵敏度分析目标。
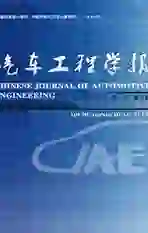
为保证转向时各转向轮均做纯滚动运动,各转向轮间应满足一定的运动协调关系,即阿克曼转向几何关系[1],如图3所示。同一转向桥内外侧车轮间转角关系如式(1)所示,各转向桥间内侧转角关系如式(2)所示。
式中:L1、L2、L4、L5分别为一、二、四、五桥轴线至转向虚轴的距离;K为主销中心距;θ1i、θ2i、θ4i、θ5i分别为一、二、四、五桥内侧车轮转角;θ1o、θ2o、θ4o、θ5o分别为一、二、四、五桥外侧车轮转角。
实际上,转向摆臂、拉杆组成的转向机构不能在整个转向范围内使上述关系得到满足,转向轮实际转角与理论转角存在误差,本研究以该误差最小作为灵敏度分析试验目标。
2.2 设计因素及变化水平
针对多轴转向系统机构特点,分别确定转向与悬架耦合运动、转向轮间传动机构与转向轴间传动机构的设计因素及变化水平。
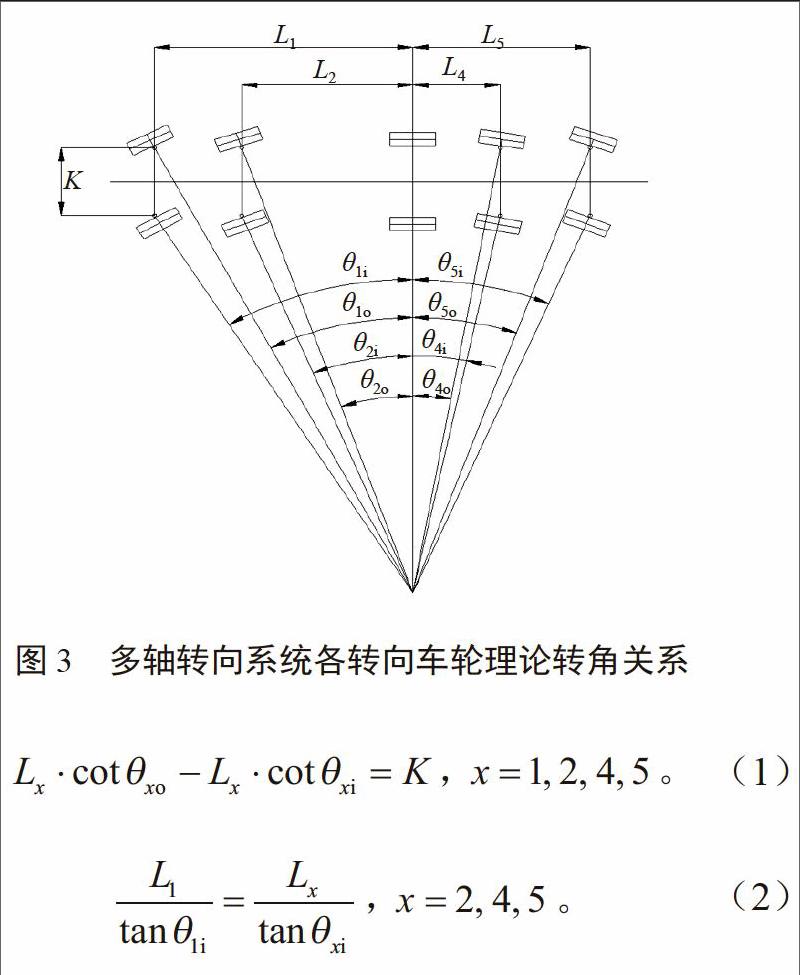
转向与悬架耦合运动传动机构如图4所示,分别由悬架上横臂、悬架下横臂、转向节、边拉杆、转向摆臂组成。其中悬架上、下横臂分别通过U2与L2点铰接于车架,在U1与L1点通过球铰链与转向节连接,U1与L1的连线即为转向主销轴线;转向摆臂通过QL点铰接于车架,为转向梯形机构的支点;边拉杆两端分别在EL点与FL点通过球铰链与转向节和转向摆臂连接。
车轮跳动时,转向节绕悬架上、下横臂转动,带动边拉杆上EL点绕FL点转动,由于边拉杆为刚性杆,车轮跳动将导致转向节绕主销轴线转动,引起前束角变化。选取确定主销轴线的铰点U1与L1,边拉杆两端点EL与FL作为转向与悬架耦合运动机构的设计因素。
转向轮间传动机构如图5所示,分别由横拉杆、左、右转向摆臂及边拉杆组成。左、右转向摆臂通过R点利用横拉杆传递轮间运动关系,由于转向杆系结构左右对称,RL与RR两铰点为非独立铰点,因此选取RL铰点坐标作为轮间传动机构的设计因素。
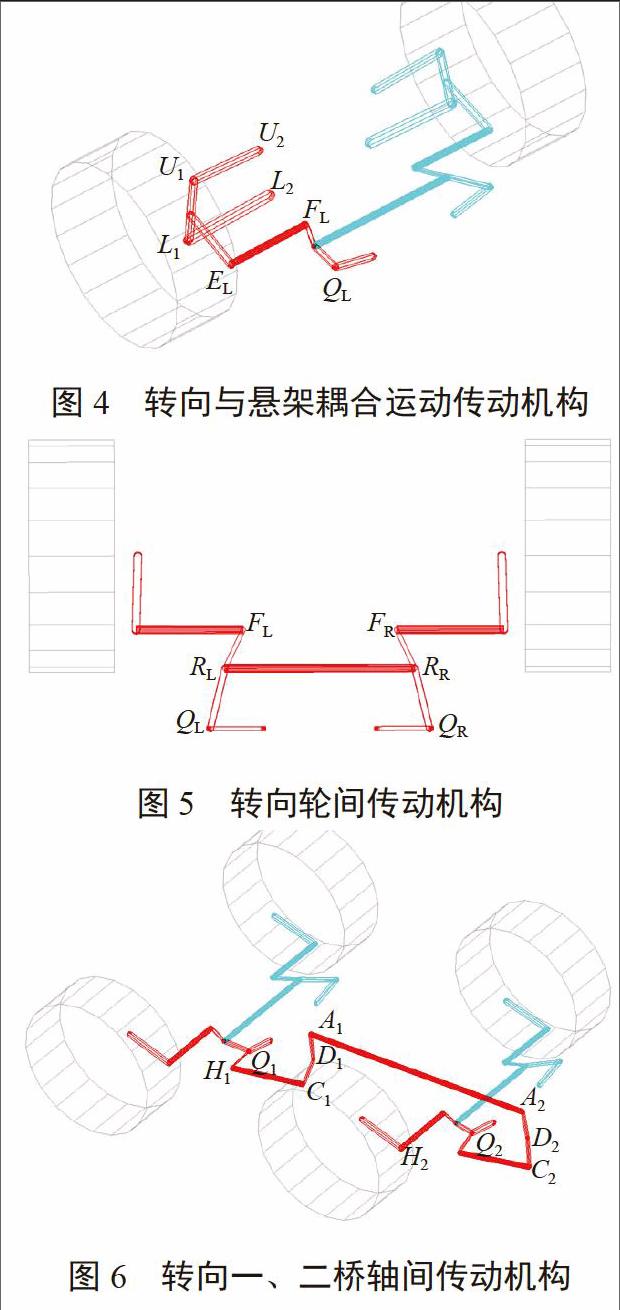
转向一、二桥轴间传动机构如图6所示,分别由纵拉杆、前后侧拉杆及垂臂等组成。其中前后垂臂通过D点铰接于车架,为轴间传动机构支点,前后垂臂通过A点利用纵拉杆传递轴间运动关系,前后垂臂分别通过C点、H点利用侧拉杆与前、后摆臂连接,因此选取A1、A2、C1、C2、H1、H2六个铰点坐标作为轴间传动机构的设计因素。
根据多轴转向系统杆系装配与调试统计数据,将各铰点位置变化范围设为±5 mm,转向与悬架耦合运动DOE因素及变化水平见表1,多轴转向系统轮间转角关系DOE因素及变化水平见表2,一、二桥轴间转角关系DOE因素及变化水平见表3,采用同样方法取一、四桥和一、五桥转角关系DOE因素及变化水平,见表4和表5。
2.3 正交试验
正交试验运行所需的参数由设计矩阵提供,其中包含了每次试验的取值[6]。根据试验设计矩阵,进行一系列的试验仿真,完成正交试验。
本研究选取ADAMS/Insight中的Screening法创建设计矩阵,该方法常用于识别对系统行为影响最大的因素或因素的组合。该方法每次仅选取设计因素变化范围的最大值与最小值,通常被称为2水平设计,确保不会遗漏对系统具有显著影响的因素[4]。
针对轮间转角关系DOE因素与轴间转角关系DOE因素数目与设计水平,选取不同的矩阵设计类型。轮间转角关系试验采用Full Factorial设计类型,该方法包含所有因素的各种组合方式,试验总运行次数为mn,m为因素水平,n为因素数目。轴间转角关系试验采用Fractional Factorial设计类型,该设计类型是Full Factorial设计类型的子集,可显著减小试验的次数,误差不会很大。
转向与悬架耦合运动、转向轮间转角关系试验与轴间转角关系试验的参数设置见表6。
2.4 灵敏度分析
根据正交试验分析计算,得到转向与悬架耦合运动试验、轮间转角关系试验与轴间转角关系试验中各因素对系统性能的影响情况,如图7~11所示。
由转向系统轮间及轴间转角关系灵敏度仿真分析可知,悬架转向耦合运动关系主要受边拉杆与梯形臂铰接点垂向高度影响,轮间转角关系主要受摆臂横拉杆铰点横向位置影响,轴间转角关系主要受摆臂侧拉杆铰点横向位置、垂臂纵拉杆铰点垂向位置影响,各铰点纵向位置对转角关系影响普遍较小。
3 结论
本研究建立了多轴转向系统运动学仿真模型,以各车轮转角满足阿克曼转向几何为目标,选定设计因素并设计正交试验,分析了各设计因素对转角关系灵敏度的影响,初步判别出影响转角关系的高灵敏度参数,可作为多轴转向系统设计与优化的依据。
参考文献(References):
王望予. 汽车设计 [M]. 北京:机械工业出版社,2003.
WANG Wangyu. Automotive Design [M]. Beijing:China Machine Press,2003. (in Chinese)
张泽星,陈国迎,宗长富. 基于灵敏度分析的EPS转向性能试验客观评价指标 [J]. 吉林大学学报(工学版),2015,45(4):1043-1048.
ZHANG Zexing,CHEN Guoying,ZONG Changfu. Objective Evaluation Indices of Steering Performance for EPS Based on Sensitivity Analysis [J]. Journal of Jilin University( Engineering and Technology Edition ), 2015,45(4):1043-1048. (in Chinese)
陈朝阳,陈娜,张代胜. 基于灵敏度分析的双前桥转向系统摇臂机构的优化 [J]. 合肥工业大学学报(自然科学版),2010,33(6):801-807.
CHEN Chaoyang,CHEN Na,ZHANG Daisheng. Optimi-zation of Double Front-axle Steering Rocker Based on Sensitivity Analysis [J]. Journal of Hefei University of Technology(Natural Science ),2010,33(6):801-807.
(in Chinese)
张富伟. 汽车悬架转向系统仿真优化与集成设计[D]. 杭州:浙江大学,2010.
ZHANG Fuwei. Simulation,Optimization and Integrated Design of Vehicle Suspension and Steering System [D]. Hangzhou:Zhejiang University,2010. (in Chinese)
古玉锋,方宗德,张国胜,等. 重型车辆多轴转向系统设计综述[J]. 汽车技术,2009(1):1-6.
GU Yufeng,FANG Zongde,ZHANG Guosheng,et al. Design of Heavy-duty Truck Multi-axle Steering System [J]. Automobile Technology,2009(1):1-6. (in Chinese)
杨隽. 结构动力学鲁棒设计方法及应用[D]. 南京:南京航空航天大学,2013.
YANG Jun. Robust Design for Structural Dynamics and Its Applications [D]. Nanjing:Nanjing University of Aero-nautics and Astronautics, 2013. (in Chinese)