基于MPC5634的混合动力汽车整车控制器硬件设计
2017-01-11汪明明邓涛罗俊林李亚南尹燕莉
汪明明+邓涛+罗俊林+李亚南+尹燕莉

摘 要:针对一款并联AMT(自动化机械式变速器)混合动力汽车,介绍了采用32位微处理器MPC5634实现整车控制器的硬件设计。详细阐述了电源电路、输入电路和驱动电路等主要硬件模块的设计原理和PCB布线方法,并利用dSPACE进行硬件在环仿真试验。结果表明,所设计的控制器能够实现预定功能。
关键词:混合动力汽车; 整车控制器; 硬件设计;MPC5634
中图分类号:U469.72 文献标文献标识码:A文献标DOI:10.3969/j.issn.2095-1469.2016.06.04
Abstract:Considering a parallel AMT hybrid electric vehicle, this paper introduced the hardware design of the vehicle controller using 32 bit microprocessor MPC5634. Descriptions of main modules, including the power supply circuit, input circuits and output circuits, and the PCB wiring method were introduced. In addition, the hardware-in-the-loop simulation test with dSPACE was adopted. The test results show that the designed controller can achieve the intended functions and has good stability and real-time performance.
Keywords:hybrid electric vehicle; vehicle controller; hardware design; MPC5634
混合动力汽车(Hybrid Electric Vehicles,HEV)集成了纯电动汽车高效率、低排放和传统车续驶里程远的优点,对节能减排有极大的帮助,受到国内外企业的青睐,是目前能实现大规模商业化的节能车型,如丰田普锐斯、雪弗兰Volt、比亚迪秦等车型。混合动力汽车的关键技术主要集中在整车系统集成和整车控制,目前对控制策略的研究文献比较多,而对实现控制策略的控制器开发研究则较少。混合动力汽车整车控制器(Hybrid Electric Vehicle Control Unit,HCU)硬件部分稳定、可靠的运行是控制策略能被良好执行的前提。HCU接收多种形式的外部信号,并转换为控制策略可以识别的信息,控制策略在控制器微处理器上进行复杂运算后获得控制命令,控制命令通过控制器驱动电路执行,或者通过通信电路将控制命令传送到其它控制单元。因此,HCU是整个控制系统的核心部件,被称作整车控制系统的“大脑”。此外,HCU工作在大电流、强电压、高辐射的整车环境中,硬件部分要具有较好的抗干扰能力[1-3]。本文对所选微处理器特性进行了介绍,对最小系统、电源电路、模拟量电路、数字量电路、频率量电路和通讯电路等进行了设计。
1 HCU硬件总体结构
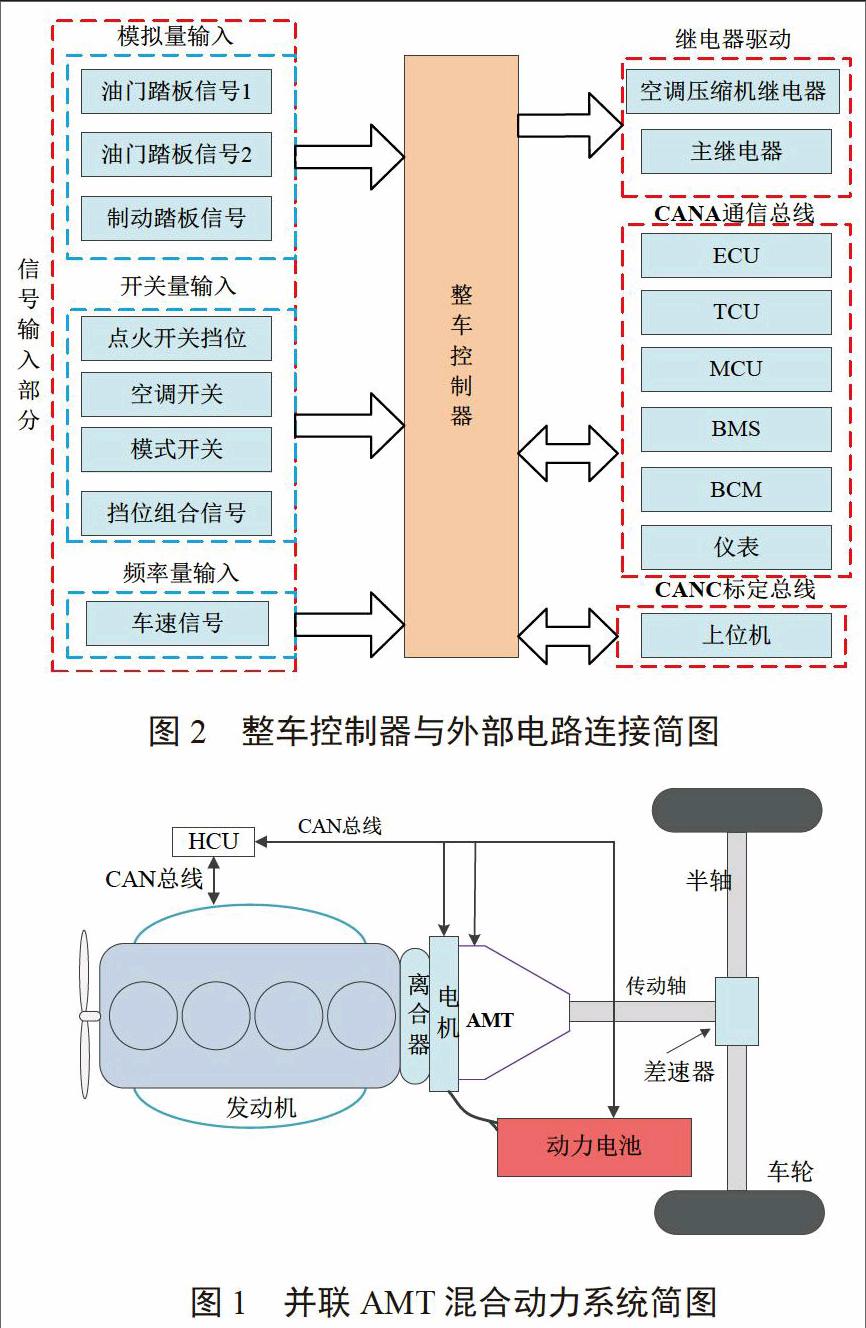
本研究针对一款并联式AMT混合动力汽车,前向模型主要包括发动机、AMT、电机和动力电池4个关键部件模型,如图1所示。并联式AMT混合动力汽车采用了典型的单轴并联结构:电机转子和变速器输入轴二者固连,电机壳体与变速器壳体固连,发动机和变速器之间采用干式离合器柔性连接,变速器输出轴的动力通过差速器、传动半轴传到车轮。各部件的控制器发动机电子控制单元(Electronic Control Unit,ECU)、变速器控制单元(Transmission Control Unit,TCU)、电机微控制单元(Micro Controller Unit,MCU)、电池管理系统(Battery Management System,BMS)通过CAN总线与HCU通信。
HCU除了要具备较强的运算和储存能力,还要接收大量输入信号并控制相关的执行器件。如图2所示,HCU与外部电路相关联的部分主要是输入信号处理电路、继电器驱动电路及通信电路。输入信号分为模拟量、开关量和频率量;HCU仅驱动与能量管理有关的空调压缩机继电器和主继电器;通信电路主要采用CAN通信,CANA通信电路负责与其它控制单元信息交互,CANC通信电路与上位机通信。本研究采用的标定软件INCA通过CANC电路通信。
2 各模块电路具体实现
2.1 最小系统设计
本研究所设计的HCU主控芯片是飞思卡尔公司的MPC5634M,该芯片是基于PowerPC架构的32位高性能微处理芯片,专为传统燃油机和混合动力汽车以及自动变速器而设计,具有低功耗、高频率、存储容量大、高度集成等特点。同时该微处理器内部Flash高达1.5 M,完全能满足复杂控制系统对数据存储和程序存储的需求,94 KB的SRAM,可以设置大量的标定量,方便研发工程中数据的标定[4]。此外,最重要的一点是很多开发平台设计公司针对该款微处理器设计了自动代码生成工具,利用这些开发工具可大大缩短开发周期。
式中,Vdata为AD转换的二进制结果;Vin为待转换的实际电压;VRH为参考电压的高电位;VRL为参考电压的低电位。所以稳定的VRH-VRL是获得正确转换结果的前提,如果VRH-VRL波动较大,即使有稳定的输入电压Vin,也无法获得稳定的转换结果。对VRH需做好滤波和隔离,本研究采用了10 uF和0.1 uF的电容以及10 uH的电感对该电路进行处理,这三个元器件要摆放到相应的引脚
附近。
为减少电磁干扰带来的影响,每个微处理器供电引脚上并联电容来过滤杂波。推荐5 V电源并联1 uF和 0.01 uF电容滤除高低频干扰,同时3.3 V电源并联10 uF和220 nF电容[5]。
2.2 电源电路设计
电源模块是整车控制器的重要组成模块,其性能的优劣会影响到整个硬件电路的稳定性和可靠性。良好的电源模块要能给系统的各个模块带来可靠的电源供给,同时还要降低干扰,提高整个系统的鲁棒性和稳定性。对系统的电源电路进行设计时,应该综合考虑系统功耗、成本、体积等因素。
MPC5634M内部常用3种类型的电源,包括5.0 V、3.3 V、1.2 V。在微处理器外部需要5 V和3.3 V的电源供给,本研究采用英飞凌公司的TLE7368电源芯片,该芯片提供一路5 V的数字电源,可给微处理器供电,同时提供两路5 V模拟电源,可给外部传感器供电。另外还提供一路3.3 V电源,满足微处理器3.3 V电源的需求。设计采用的是TLE7368使用手册的推荐电路,如图3所示。需说明的是采用单向二级管,防止电源反接对电路造成损坏,采用 TVS管使后级电路电压钳位到25 V,保护后级电压电路。
2.3 输入模块电路设计
信号采集电路是控制器干扰的主要来源,因此 这部分电路需要设计较好的滤波电路以减小干扰。本研究设计的整车控制器的信号采集电路主要包括模拟量、开关量和频率量。
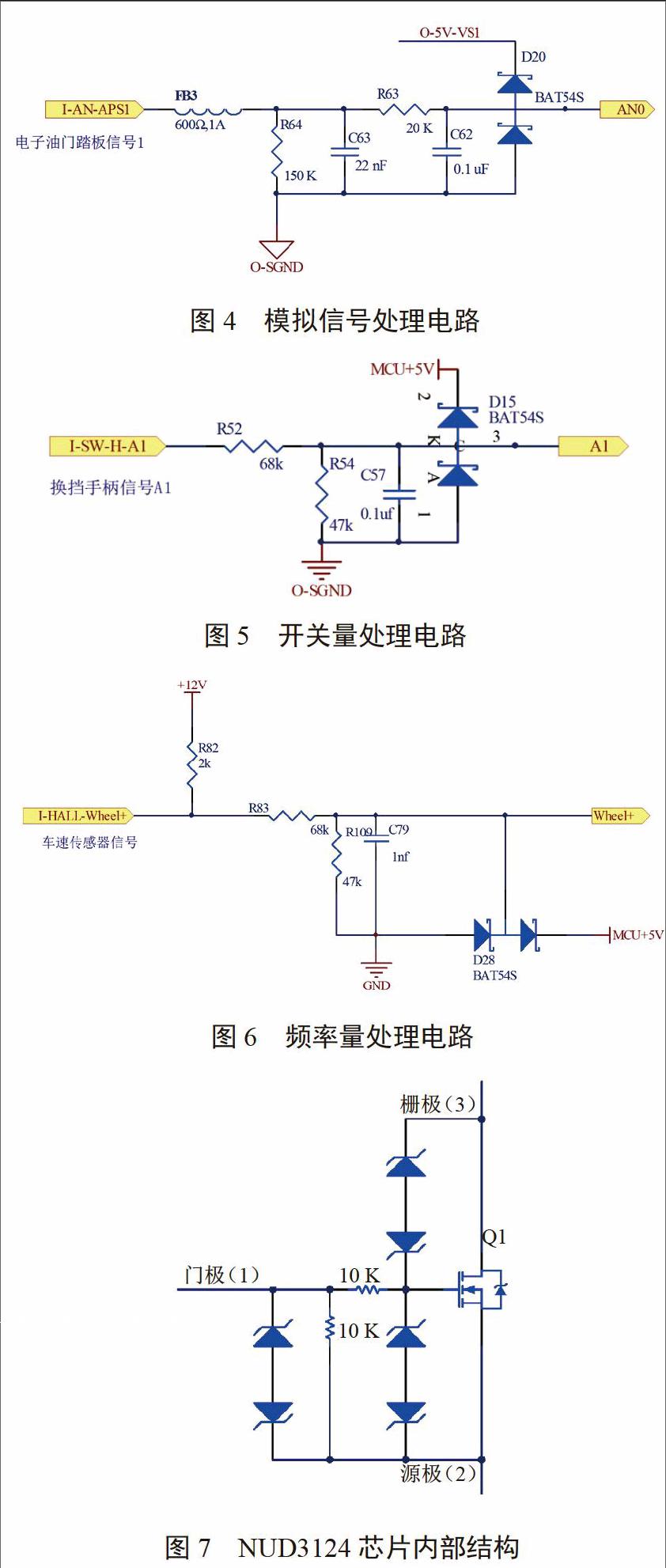
模拟信号包括制动踏板与油门踏板信号,其开度值代表驾驶意图,引入干扰后的模拟信号会有信号的跳变,控制策略很可能误判。该3路模拟量信号输入范围都在0~5 V,3路模拟信号处理电路完全一样,电路如图4所示。FB3为磁珠,利用其阻高频通低频的特性,减少高频干扰的进入;电阻R64主要起分压作用,一般取较大值,减少因为后级电路的接入而造成输入信号电压值的失真。C63、R63和C62构成典型的π型滤波电路,进一步对引入的干扰进行过滤,同时R63具有限流作用,防止误接高电压时产生的高电流对电路造成伤害。D20为BAT54S,其作用和两个单向二极管串联是一样的,如果其输入端电压小于0 V,下边二极管导通,使其电压升到0 V,如果输入端电压大于5 V,上边二极管导通,使其电压降到5 V,这样保证了输出端电压钳位为0~5 V。
开关量电路高低电平的切换间隔比较大,由干扰造成高低电平误判的可能性很小,该电路可设计得相对简单些。大多数情况下的开关信号电压等于电池电压,所以,需要设计分压电路,使其控制在5 V以下。如图5所示的电阻R52、R54构成分压电路,根据不同情况调整电阻R52、R54的大小,可适用不同的电压输入信号,同时电阻R52和电容C57构成常用的RC滤波电路。D15作用和前文叙述一样。
频率量主要是车速信号,车速传感器采用霍尔传感器,根据转速信号盘的旋转产生一定频率的12 V方波信号,其周期随着车速的改变而改变。微处理器通过eTPU或者eMIOS模块测量其高电平的时间,或者测量单位时间内接收的脉冲数,即可推算车速。本研究采用的RC滤波电路也获得了良好的测试结果,如图6所示,为增强电路的通用性,通过2 K的电阻将转速信号上拉到12 V,通过R83、R109分压到5 V,然后采用RC电路滤波。需要注意的是,C79要根据RC电路的截止频率计算,截止频率与最高车速及车轮半径、每转输出脉冲数有关。在本设计中,车轮每转一圈传感器输出4个脉冲,最高车速200 km/h,车轮半径0.282 m,可计算到最高频率,再乘以安全系数,最终确定电容为1 nF,其截至频率为2 342 Hz。
2.4 驱动电路设计
本研究中主要驱动的部件为空调压缩机的继电器和主电源的继电器,继电器的本质是电感线圈,其吸合电流根据型号不同而有区别,通常只有几十毫安,其功率相对较小,一般MOS管和三级管均能驱动。驱动电路通断切换的瞬间,线圈会产生较高的感应电动势,如果不做处理很可能击穿驱动芯片甚至是微处理器,通常会在电路中加续流二极管。汽车上较多采用低边驱动对继电器进行驱动,而续流二极管的方式不方便实现。本研究采用安森美半导体公司推出的NUD3124驱动芯片,该芯片是专用的继电器驱动芯片,如图7所示,内部集成了限流电阻、MOS管,同时具有续流作用,较好地满足了对继电器的驱动。
2.5 通信电路的设计
本设计的通信电路仅采用了CAN总线通信方式。虽然MPC5634M内集成了FlexCAN模块,但是不能直接实现CAN通讯,因为FlexCAN模块只是在逻辑上实现了所要传输数据的编码与解码,如果在CAN总线上实现正常通讯,还需另外增加CAN总线驱动器,以实现模块之间的物理连接。
CAN通信电路如图8所示,驱动芯片采用博世公司的CF160CAN,该芯片对CAN模块的待发送信号提供差动发送能力,同时将接收的差分信号解析。共模电感ACT45B可抑制高速CAN信号线产生的电磁波向外辐射[6]。在CANH和CANL两条传输线上接入了MMBZ27VALQ半导体芯片,该芯片内部集成两对TVS,可以为CAN总线提供静电释放(ESD)保护和浪涌脉冲保护。为防止线缆之间的信号反射并实现终端匹配,末端并联120 Ω的终端电阻[7]。
2.6 整车控制器PCB布线设计
综合考虑元器件密度及成本问题,整车控制器印刷电路板(Printed Circuit Board,PCB)采用四层板设计。在元器件布局及走线方面主要考虑以下几点[8]:
(1)核心元器件应当优先布局,晶振电路周围不要布置模拟信号。
(2)模电、数电分开布局,电源或者大功率器件最好布置在PCB两侧,利于散热。
(3)输入信号的滤波电容尽可能放置在接插件附近,这样PCB板内侧引入的干扰会少些。
(4)电流较大电路走线要相对粗些,较高频率的电路要尽量远离模拟电路,且与相邻走线保持一定间距。
(5)相邻布线层的信号线走向尽量垂直,以免产生寄生电容。
(6)模拟地和数字地要分离,最后通过磁珠或者0 Ω电阻连接,实现单点接地。
(7) 去耦电容尽量布置在芯片电压引脚附近,电源、地、去耦电容形成的回路越短,抗干扰能力越强。
3 硬件在环试验
将混合动力汽车整车模型及部件模型下载到dSPACE实时硬件平台中,以模拟整车控制器的真实应用环境,主要测试HCU信号采集与处理功能、通信功能和控制策略执行功能,同时还对HCU的正确性加以验证。为了尽可能地模拟HCU的真实应用环境,本设计的整车控制器与dSPACE信号的交互连接方式和实车完全一样。仿真平台的逻辑连接框图和实物连接分别如图9和图10所示。
打开ControlDesk上位机采集的分配转矩和需求转矩波形信息,为了显示清晰,选取1~11 s时间段记录的波形,硬件在环运行曲线如图11所示。
在该段仿真时间内,控制器的分配转矩曲线几乎完全与需求转矩曲线重叠,说明控制策略能够正常、快速运行。在近半小时的仿真期间,电源电路温度正常,无过热现象,信号采集以及通信部分电路运行良好,无故障出现。
4 结论
为满足HCU功能要求和性能要求,通过对各个功能模块的设计,完成了一款高性能整车控制器的开发。搭建硬件在环仿真平台,对控制器的功能和性能进行测试,验证了控制器的正确性。硬件平台的开发以及硬件在环仿真测试,为下一步改进控制策略和实车试验打下了坚实的基础。
参考文献(References):
闫龙涛. 基于XC2268N的纯电动汽车整车控制器设计[D]. 天津:天津大学,2012.
YAN Longtao. Electric Vehicle Controller Based on XC2268N [D]. Tianjin:Tianjin University,2012.(in Chinese)
潘凯,张俊智,甘海云,等. 基于MPC555的混合动力电动汽车整车控制器硬件系统设计[J]. 汽车工程, 2005,27(1):20-23.
PAN Kai,ZHANG Junzhi,GAN Haiyun,et al. Hardware Design of Vehicle Control Unit for Hybrid Electric Vehicle Based on MPC555 [J]. Automotive Engineering,2005,27(1):20-23. (in Chinese)
耿鹏. 增程式燃料电池客车动力系统主控制器研究[D]. 北京:清华大学,2013.
GEN Peng. Development and Research of Vehicle Control-ler for Extended-range Fuel Cell Bus [D]. Beijing:Tsinghua University,2013. (in Chinese)
韩利,温旭辉,曾莉莉. 混合动力电动汽车用电机及驱动控制器的电磁兼容设计[J]. 安全与电磁兼容, 2006(1):81-84.
HAN Li,WEN Xuhui,ZENG Lili. EMC Design of Motor and Drive Control System Used in Hybrid Electrical Vehicle [J]. Safety & EMC,2006(1):81-84.(in Chinese)
金松涛,刘青松. 混合动力汽车电磁兼容技术研究[J]. 客车技术与研究,2010,32(2):45-47.
JIN Songtao,LIU Qingsong. Study on the Electromagnetic Compatibility (EMC) of Hybrid Electric Vehicles [J]. Bus Technology and Research,2010,32(2):45-47.(in Chinese)
NELSON J J,AIDAM M. HEV System EMC Investiga-tion During Transient Operations [C]//18th International Zurich Symposium on Electromagnetic Compatibility,EMC Zurich, September 24-28,2007. Piscataway N. J:IEEE,c2007:205-208.