多特征辅助的SAR-GMTI雷达扩展动目标检测方法
2017-01-10杨志伟许华健廖桂生
杨志伟,张 蕊,许华健,廖桂生,杨 剑
(西安电子科技大学雷达信号处理重点实验室,陕西西安 710071)
多特征辅助的SAR-GMTI雷达扩展动目标检测方法
杨志伟,张 蕊,许华健,廖桂生,杨 剑
(西安电子科技大学雷达信号处理重点实验室,陕西西安 710071)
在远程监视模式下,高分辨率SAR-GMTI雷达系统面临目标扩散、信噪比低等挑战,传统基于点目标检测方法性能恶化明显.本文提出一种目标形状与阴影辅助的高分辨率SAR-GMTI雷达扩展动目标检测方法.该方法首先对杂波抑制后的残差图聚类并生成目标形状信息;然后依据目标阴影形成的几何模型计算与目标形状相匹配的阴影模板,并利用目标径向速度估计值生成阴影位置匹配条件;最后综合利用阴影形状、位置及幅度信息,剔除不符合匹配条件的虚假目标,降低虚警.仿真验证了所提方法对低信噪比扩展目标检测性能的改善.
合成孔径雷达;地面运动目标检测;扩展目标;目标形状与阴影辅助;模板匹配
1 引言
合成孔径雷达(SAR)技术与地面运动目标检测(GMTI)技术相结合,能够高分辨成像的同时,完成地面运动目标的检测、参数估计与定位.在机载远程监视应用背景下,提高分辨率一方面可以获得更加清晰的SAR图像,另一方面也可以减少与地面运动目标相竞争的杂波能量,利于挑选满足独立同分布的训练数据;不过,提高SAR图像分辨率后,地面运动目标散焦会更加显著,面临目标扩散、信噪比降低等问题,有必要发展新的运动目标检测方法.
近年来,在SAR动目标检测方面,国内外学者提出了多种解决途径,大致可分为两类:第一类是基于单通道SAR系统的动目标检测方法,此类方法主要利用目标与杂波回波的差异(如多普勒中心频率[1]、调频率[2]和时频特性[3~6])来检测动目标;第二类则是基于多通道SAR系统的方法,该类典型方法主要从杂波抑制的角度出发,利用动目标与场景回波的空时特性差异(如相位中心偏置天线(DPCA)技术[5]、沿航迹干涉(ATI)技术[12],空时自适应处理(STAP)技术[8~10]及其改进技术[11~13]等)来进行动目标检测.
在中等分辨率(例如10m×10m)下,典型地面运动目标可视为点目标,上述检测算法具有较好的检测性能,但是,它们均仅利用了动目标的径向速度信息.随着分辨率的提高,运动目标会占据多个分辨单元,呈现扩展目标特性(形状、尺寸等);此外,雷达远距离探测时,运动目标因遮挡产生的阴影也凸显出来.静止目标阴影在SAR图像解译,包括SAR图像目标检测与识别等方面已经有广泛应用[15~17],动目标阴影信息的利用则相对较少.文献[16]首先通过提取目标的正射阴影来得到目标形状信息,然后结合单幅SAR图像的强度检测结果与道路辅助信息来提高检测、定位性能.不过,该方法要求动目标在单幅SAR图像上可检测,即需要较高的信杂比;此外,实际SAR图像上的道路区域接近噪声电平,准确提取动目标的正射阴影较为困难.文献[17]针对聚束模式,提出了利用多视SAR图像序列阴影位置变化来检测、跟踪动目标的方法,检测性能不受信杂比影响.不过,该方法需要对多视SAR图像序列进行精确配准,并且需要在较大范围内改变观察视角来区分动目标与地物场景阴影的变化.
针对上述利用阴影检测动目标方法的不足,结合高分辨率SAR-GMTI雷达远程监视地面运动目标的特点,通过建立动目标阴影几何计算模型提出了目标形状与阴影辅助的地面运动目标检测方法(S2A-MTD).该方法首先对多通道数据进行自适应杂波抑制处理,提高强杂波区的动目标检测性能,并通过提取潜在目标区域的最小外接矩形生成目标形状信息;然后依据形成目标阴影的几何模型计算与目标形状相匹配的阴影模板,并利用目标径向速度估计值生成阴影位置匹配条件,剔除地物阴影;最后综合利用阴影形状、位置及目标幅度信息,剔除不符合匹配条件的强地形杂波区域,降低虚警概率.相比于传统点目标检测方法而言,所提方法通过对动目标形状、速度及阴影进行匹配,显著提高了对低信噪比扩展目标的检测性能.仿真实验验证了所提方法的有效性.
2 问题描述
2.1 多通道信号模型
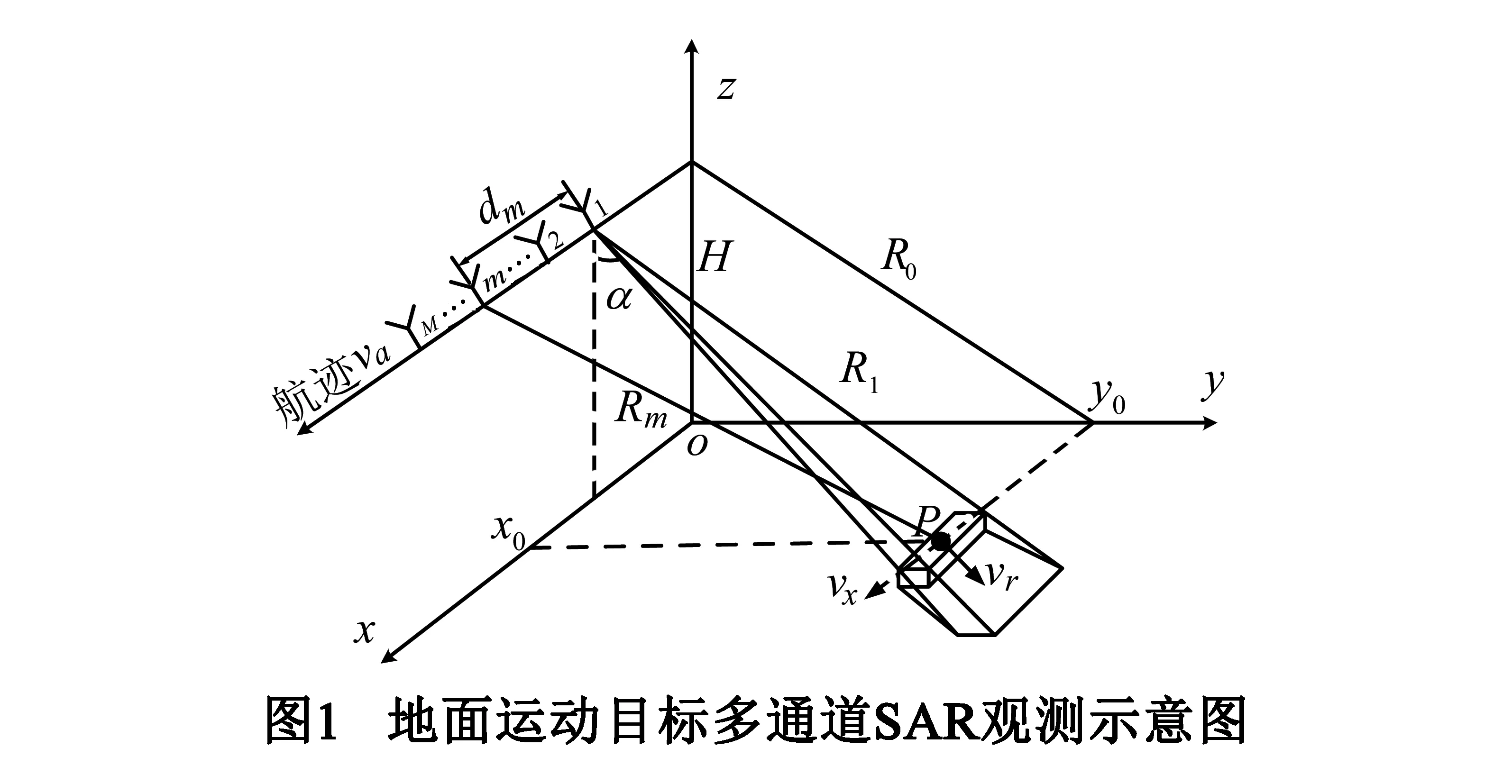
假设多通道SAR系统的雷达阵列沿航迹分布并工作于正侧视状态,其空间坐标系和观测示意图如图1所示:x轴方向表示沿航迹方向(方位向);y轴垂直于航迹方向(距离向).va表示雷达平台速度,H为平台的高度,α为平台下视角;t=0时刻动目标中心P点处于(x0,y0)处,与沿航迹方向的最短斜距为R0,以恒定速度(vx,vr)运动,其中vx为方位向速度(定义与平台运动方向一致为正),vr为径向速度(定义靠近航向为正).为简便起见,将地面运动目标(例如卡车、大型拖车、装甲车等)抽象为刚性长方体结构,图1中的斜线白色区域为动目标的阴影,其具体形成过程将在2.2节详细展开说明.
在t时刻P点与通道m的瞬时斜距经泰勒展开并忽略二阶以上的项可得:
(1)

设雷达发射信号的基带复包络为sT(τ)=gr(τ)exp(jπγrτ2),距离快时间τ∈[-Tp/2,Tp/2](Tp发射线性调频信号的时宽),γr是发射线性调频信号的调频率,gr(·)为信号的窗函数,一般为矩形窗.于是第m个通道接收信号经同步检波后的基带信号可表示为:
(2)
其中,gam(t)表示通道m的方位向窗函数;t∈[-Tm/2,Tm/2]表示方位慢时间(Tm为方位积累时间);σt表示目标的后向散射系数,c表示光速,λ为雷达工作波长.

(3)
其中,
实现方位脉压的同时可完成通道间的时间校正,Ar和Aa分别表示各通道回波信号经距离压缩后和方位压缩后目标信号的增益,Br为线性调频信号的带宽,Ba为方位多普勒带宽.可以看出,相比于静止目标,运动目标成像后的m通道与参考通道间还存在一个固定相位差exp(-j2πdmvr/λ/va),而该相位差则是检测动目标的关键.动目标在经过SAR成像后的空域导向矢量为
(4)
同时,运动目标方位向上成像的实际位置x=x0+vrR0/va与真实位置x0的偏差为:
(5)
具有较大几何尺寸或散焦均导致目标占据多个距离-方位分辨单元,呈现扩展目标特性.对于自身占据多个分辨单元的大尺寸目标而言,鉴于目标为刚体,每个分辨对应的散射点具有相同的运动模型,即具有相同的干涉相位;对于散焦后占据多个分辨单元的扩展目标而言,鉴于不同通道采用了相同的方位匹配函数,动目标散焦将具有一致性,散焦后的干涉特性与散焦前保持一致.
2.2 阴影区域计算模型
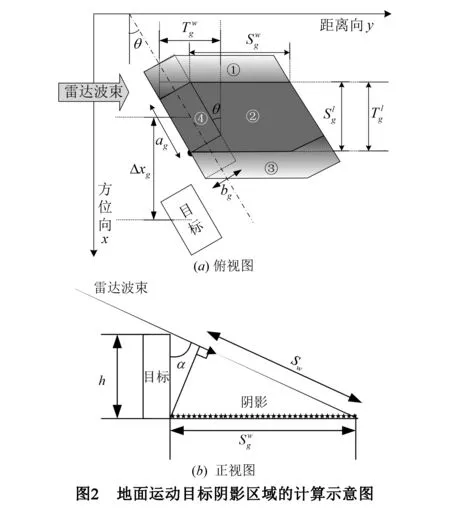
尽管SAR成像机理复杂,但是在忽略电磁波透射与绕射效应后,SAR图像中的阴影形成机理可用几何光学理论进行描述.地面运动目标阴影区域的计算示意如图2所示,根据几何光学理论,对阴影形成主要起作用的是阴面(即背向雷达方向)与阳面(即面向雷达方向)的交界线上的顶点(图2(a)中黑点所示).与静止目标类似,合成孔径内雷达相对目标视角的变化会导致形成如图2(a)中①和③所示的半阴影区域与②所示的全阴影区域.此外,对运动目标而言,由于存在径向速度,成像后会发生方位位置偏移,在目标真实位置处留下正射阴影(图2(a)中④所示区域).
(6)
(7)

3 目标形状与阴影辅助的检测方法
对于地面运动目标而言,虽然成像后由于其径向速度导致目标方位向的位置偏移,以致难以直接找到与运动目标对应的阴影区域;但是利用目标测速和重定位以及运动目标几何尺寸与其阴影的对应关系,可实现目标与阴影的匹配处理.本文所提的扩展目标检测方法的具体实现流程如图3所示.
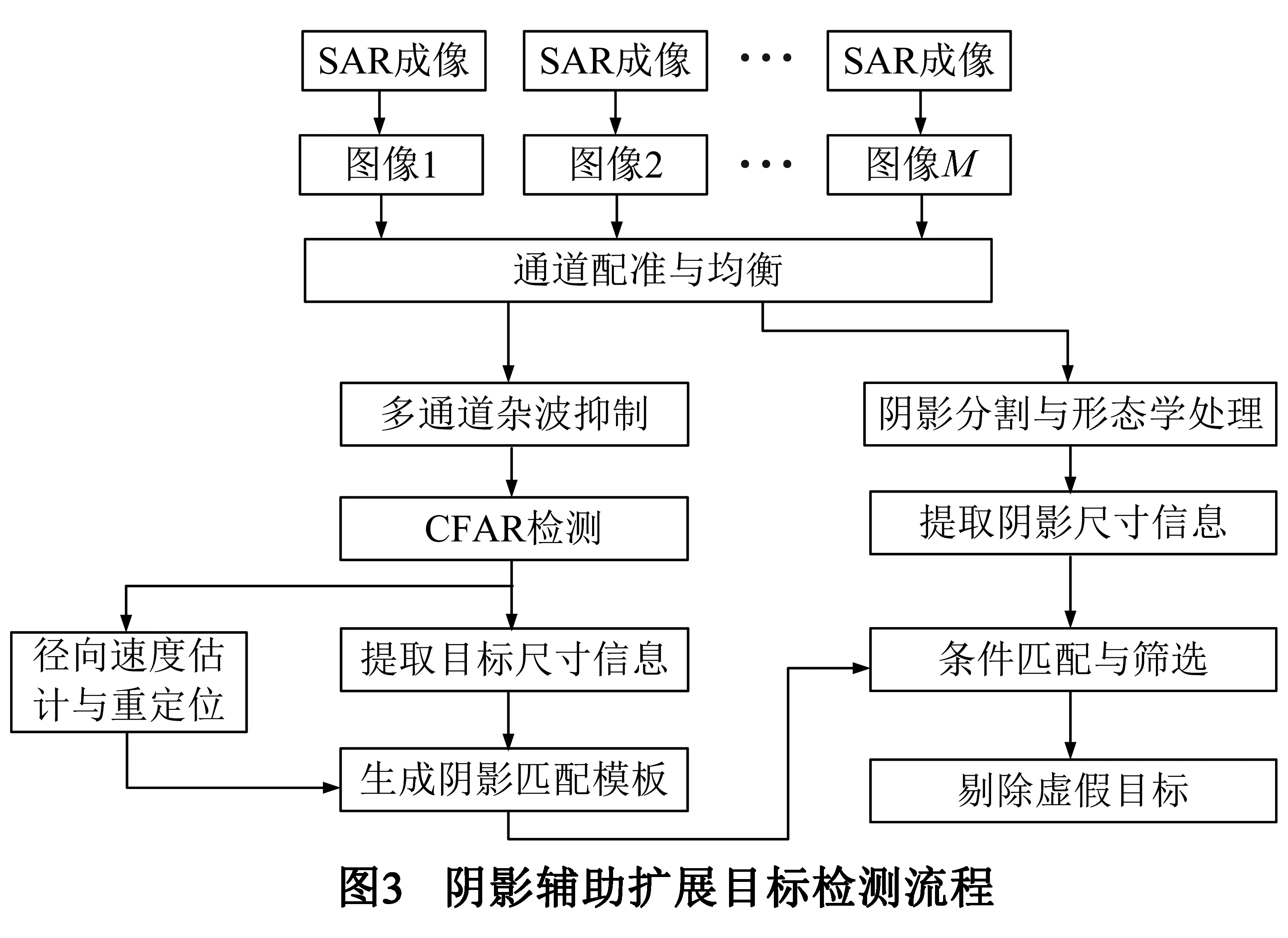
在图像域自适应抑制杂波后,采用恒虚警率技术(CFAR)初步检测出潜在运动目标的位置.然后通过聚类处理提取出潜在目标的形状信息,进而依据形成目标阴影的几何模型计算与目标形状相匹配的阴影模板,并利用目标径向速度估计值生成阴影位置匹配条件;同时利用图像分割与形态学处理对单幅SAR图像进行处理以获取处于噪声水平的闭合区域及其尺寸信息.根据阴影在形状与位置上的匹配模板,对定位后的搜索区域进行动目标阴影的匹配筛选,剔除虚假目标,降低虚警.
3.1 目标测速定位与阴影区域模板生成
为了设计目标及其阴影的匹配条件,首先需要估计目标的径向速度,并对潜在目标进行重定位.对M个通道SAR成像结果进行自适应杂波抑制与CFAR检测后,可利用自适应匹配滤波(AMF)方法估计各潜在目标的径向速度[18],动目标的径向速度估计值为
(8)
由于扩展目标占据多个像素,并且在刚体运动假设下,动目标的径向速度具有一致性[19],可以利用目标内的所有像素估计的径向速度的中值作为该目标的估计速度,则该潜在目标的定位结果为
(9)

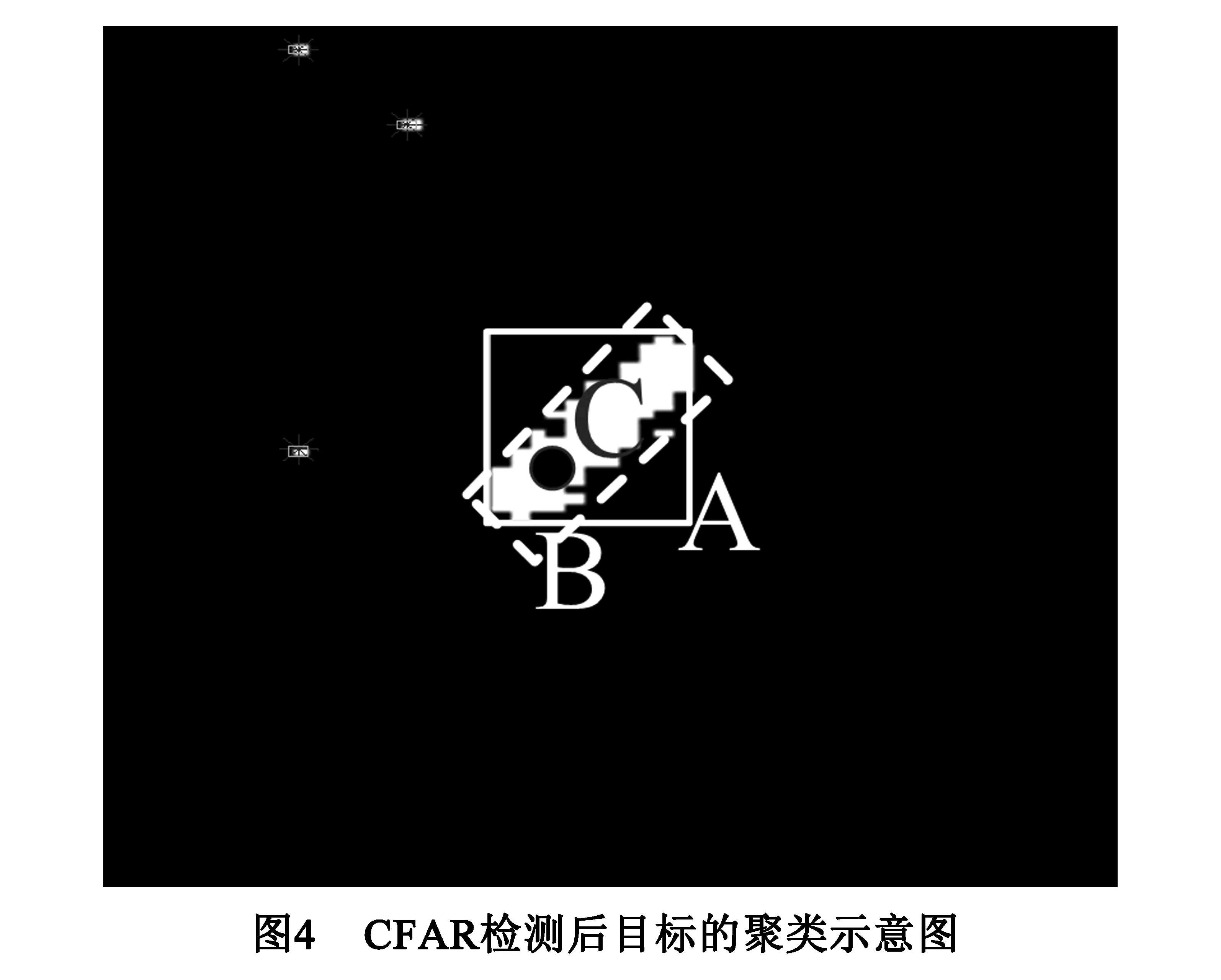
根据2.2小节的分析,生成目标阴影区域需要目标的尺寸信息.为获取目标的尺寸信息,本文对于CFAR检测后的结果进行目标聚类,以获得各类的聚类中心及对应的像素群,图4是CFAR检测后一个目标的聚类结果示意图,其中C表示该聚类目标的聚类中心,实线框A表示该目标的外接矩形,而虚线框B表示该目标的最小外接矩形[20],从中我们可以看出虚线框B所得到的最小外界矩形能够更好的贴近目标的真实形状.因此对于目标聚类的结果,本文通过提取其最小外接矩形来获取目标的尺寸信息.

(10)
其中,hmin和hmax分别表示实际目标高度的下界和上界,根据典型车辆的先验高度信息,本文中hmin和hmax分别取1.2m和5m,则获得目标i所对应的阴影匹配模板为:
(11)
其中,Tpr(i)∈Tw(i)+[min(Sw(i)),max(Sw(i))]为距离向宽度;Tpa(i)为方位向宽度值.
3.2 匹配条件设计
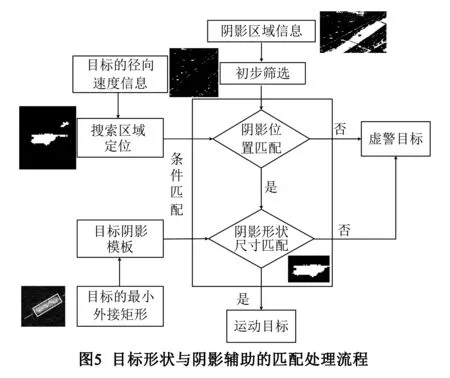
在单幅SAR图像提取出阴影区域的基础上,我们设计的目标形状与阴影辅助的匹配处理流程如图5所示.其中提取阴影区域的步骤包括:首先采用Ostu算法[21]对SAR图像进行分割;然后运用形态学处理方法(包括闭运算与开运算)提取阴影的闭合区域;最后获得各闭合区域的最小外接矩形信息,确定各阴影区域的尺寸信息.

(12)
根据以上两式,即可完成对SAR图像上阴影部分的初步筛选.该步骤用于去除包括河流、道路等在内的阴影区域.
然后进一步设计如下两个匹配条件.
(13)

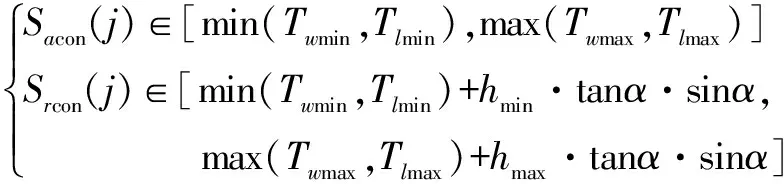
(2)阴影形状尺寸匹配条件:阴影区域的方位向宽度Sacon(j)和距离向宽度Srcon(j)应分别满足
(14)
其中,Δa>0为方位向允许误差,Tpa(i)和Tpr(i)分别表示目标i所确定的阴影匹配模板的方位向宽度和距离向宽度,inf(·)和sup(·)分别表示下确界和上确界.
如果潜在目标经过相应处理后同时满足上述两个匹配条件,则认为该潜在目标为感兴趣目标,进而可以利用与其相匹配的阴影区域重新估计目标的径向速度、方位向速度以及尺寸等信息;否则认为其为虚假目标,应予以剔除.
4 仿真实验
下面进行计算机仿真验证本文所提S2A-MTD方法的有效性.首先根据表1所示的系统参数,仿 真杂波场景.然后根据表2的目标参数结合2.1节的阴影形成几何模型,仿真4个运动目标及其阴影.
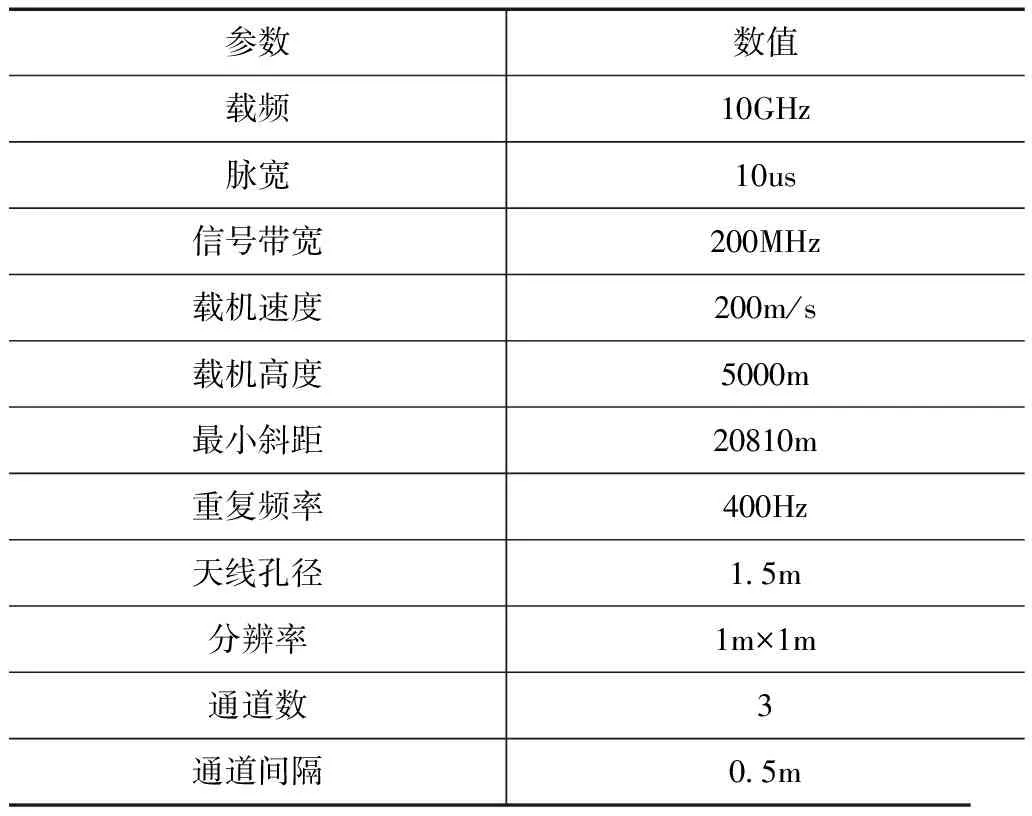
表1 系统参数
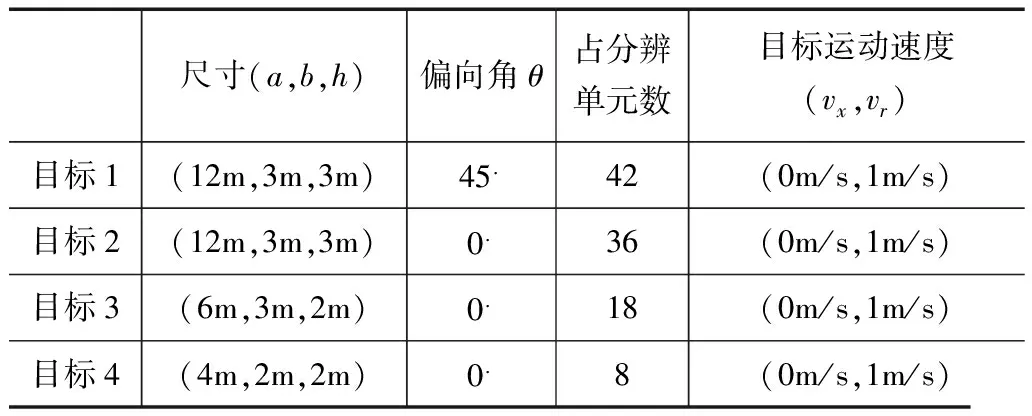
表2 目标参数
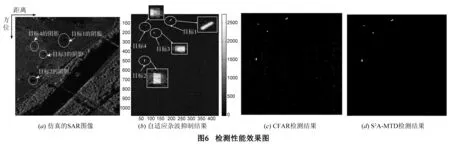
多通道SAR回波仿真采用正侧视条带式成像模式,以天线1为发射通道(参考通道),采用一发多收模式,基线长度满足DPCA条件.其中方位向接方向图加泰勒权,二维脉压前的输入信噪比和输入杂噪比分别为SNR=-5dB(即目标各个分辨单元的信噪比),CNR=-5dB.由于本文暂不考虑散焦问题,因此运动目标仅存在径向速度.仿真的运动目标及其阴影与仿真的杂波场景SAR图像如图6(a)所示,由于信杂比小,目标淹没在杂波背景中,因此图6(a)中无法看到动目标,但是可以很清楚的看到4个目标成像后对应的阴影.
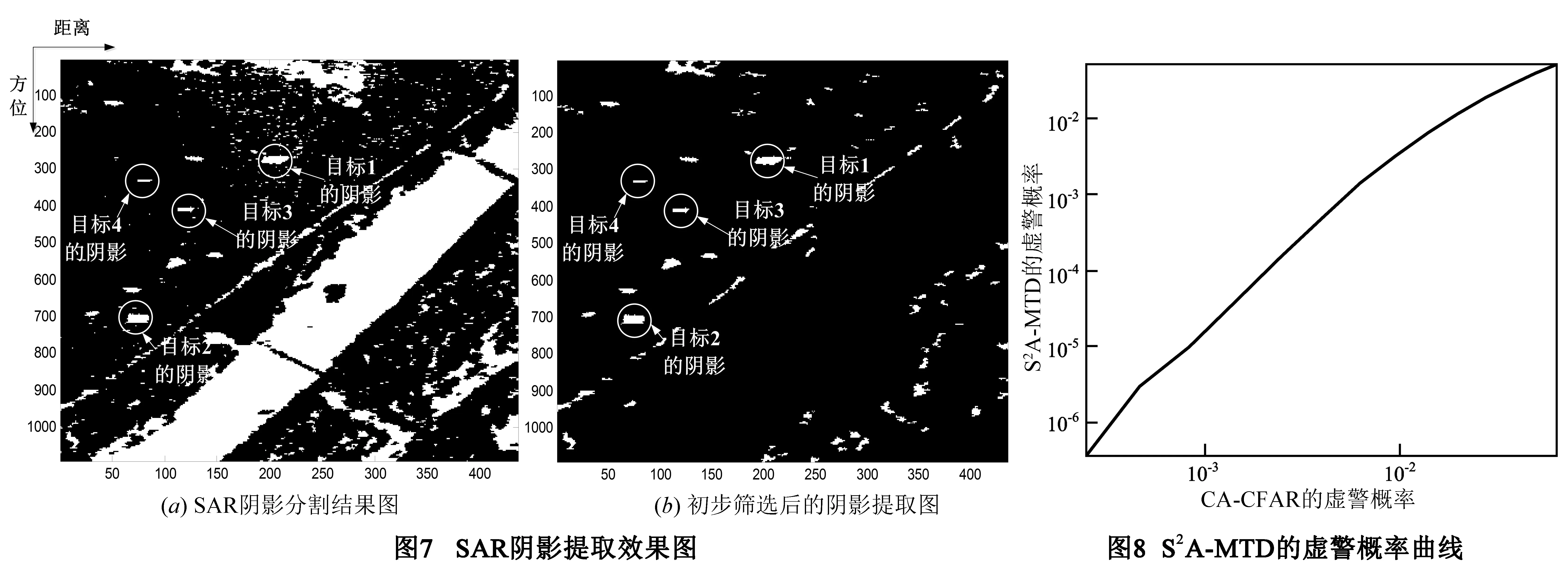
自适应杂波抑制后利用CA-CFAR进行目标检测,然后再利用S2A-MTD进一步检测.其中目标聚类窗可以根据实际中可能出现最大目标的尺寸以及图像的分辨率确定,本文选取聚类窗的大小为30×30,且目标1、2、3和4的径向速度估计值分别为1.0m/s、1.05m/s、0.85m/s和0.95m/s.图6(b)为杂波抑制后的效果图,可以观察到杂波对消后,动目标的能量被有效的保留.经统计发现,抑制后的背景近似服从零均值复高斯分布.同时SAR图像的阴影分割结果如图7(a)所示,为了消除河流等散射系数低的非“阴影”区域的影响,需要利用目标的经验尺寸信息,计算运动目标阴影的尺寸范围,将不符合该范围的“阴影”予以剔除,剔除后的结果如图7(b)所示.图6(c)和(d)给出了CA-CFAR检测结果和S2A-MTD在其基础上的检测结果,可以明显地看出S2A-MTD具有很好的降低虚警的能力,并且能够有效地保留4个目标.而图8表示了在给定的仿真参数下S2A-MTD进行再检测后的虚警概率与CA-CFAR虚警概率的关系曲线.从图8中我们可以很明显地看出相比于CA-CFAR,S2A-MTD的虚警概率有很明显地改善.
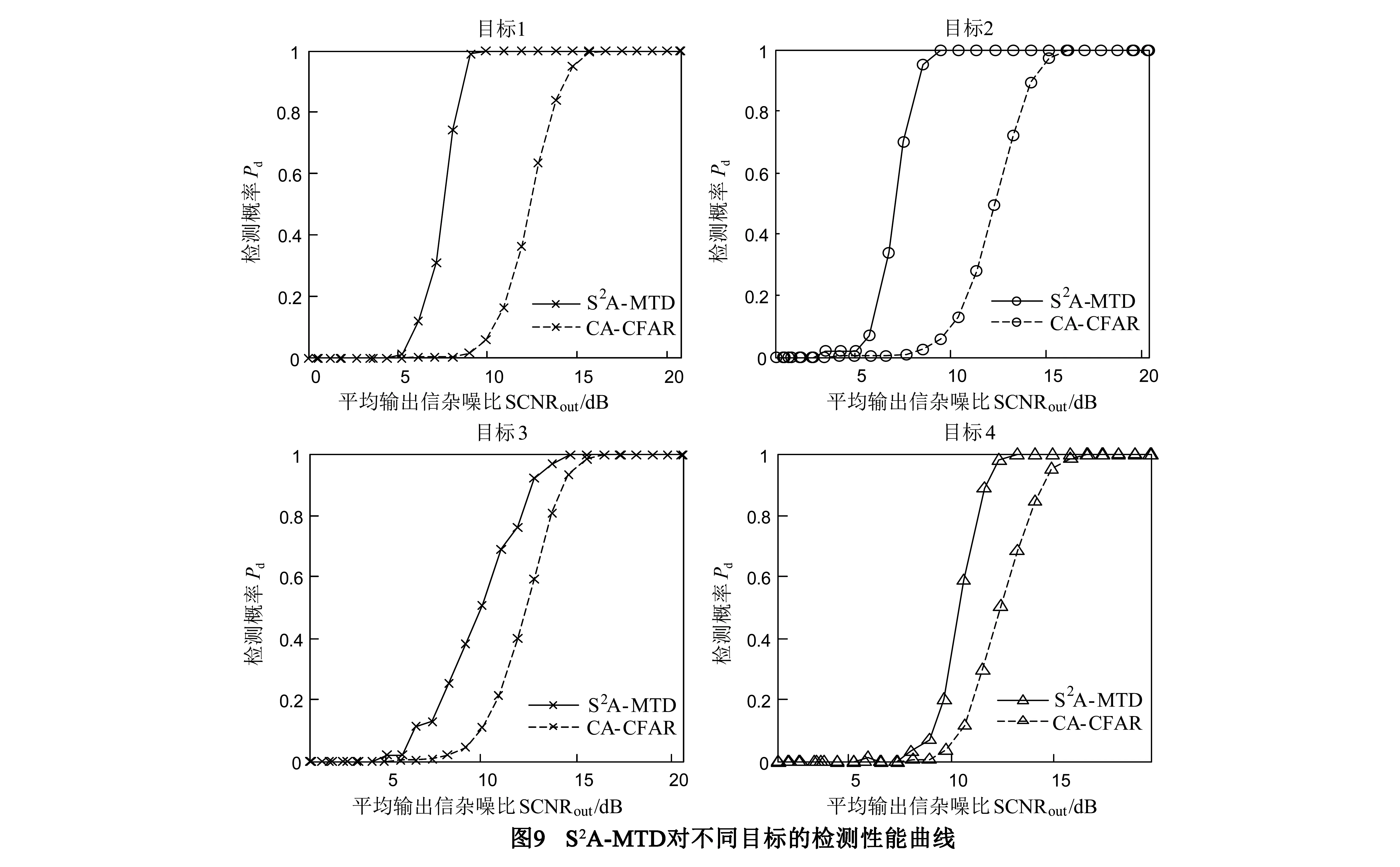
虽然S2A-MTD能够在CA-CFAR的基础上进一步降低虚警,但是同时也有一定的检测概率损失.为了进一步验证所提方法的有效性,我们在上述仿真参数下给定10-6的虚警概率,对设计的四个非起伏目标进行了100次蒙特卡洛实验,对比了在相同虚警条件下,S2A-MTD与CA-CFAR的检测概率(只要检测到扩展目标的一个像素,就认为该目标的检测概率为1)随杂波抑制后平均输出信杂噪比的变化关系,其检测性能曲线如图9所示.图9中的四幅子图分别表示CA-CFAR和S2A-MTD对目标1、2、3和4的检测性能曲线.从图9中的检测性能曲线图中可以看出,对于扩展目标而言,S2A-MTD相比于CA-CFAR具有更好的检测性能.目标1与目标2的平均输出SCNR可改4dB~5dB,目标3与目标4的平均输出SCNR可改2dB~3dB.从图9中还可看出目标1和2的检测性能优于目标3和4,这是因为目标1和2的尺寸大于目标3和4的尺寸.由此可知,S2A-MTD的检测性能不仅与目标的输出信杂噪比有关,还与目标的本身特性(如尺寸等)有关.目标的输出信杂噪比除了直接影响目标的检测性能外,对S2A-MTD还有两方面的间接影响:第一,由于S2A-MTD很大程度地依赖于目标的尺寸等信息,输出信杂噪比较低时严重地影响了目标的尺寸,引起畸变;第二,输出信杂噪比还影响了目标的径向速度估计,从而影响定位精度.而这些最终都会影响S2A-MTD对目标的检测性能.对扩展目标的形状特性而言,由检测性能曲线可以看出扩展目标的尺寸越大,特别是沿方位向的尺寸越大,那么其对应的阴影匹配条件越容易满足,因此检测性能也越好.
5 结束语
本文提出了一种基于目标形状与阴影辅助的高分辨率机载远程监视SAR扩展目标检测方法(S2A-MTD),即利用动目标与其阴影在尺寸与位置上的对应关系来实现阴影辅助检测匹配条件的设计.实验仿真分析表明,当目标具有显著的几何特征和阴影特征时,本文所提S2A-MTD方法相比于传统CFAR检测方法,可以有效的降低虚警概率,提高了对扩展目标的检测性能.因为目标的阴影位置匹配条件与阴影形状尺寸匹配条件是两个动态范围,所以对于动目标形状上的变化(如形状不规则目标)具有一定的稳健性.
本文仅考虑了是否有阴影与目标相匹配的问题,对于目标与阴影间的误匹配(多匹配或错误匹配),以及具有目标散焦和密集目标环境时的检测问题,将是我们下一步需要重点开展的工作.
[1]Chen H,McGillem C D.Target motion compensation by spectrum shifting in synthetic aperture radar[J].IEEE Transactions on Aerospace and Electronic Systems,1992,28(3):895-901.
[2]Fienup J R.Detecting moving targets in SAR imagery by focusing[J].IEEE Transactions on Aerospace and Electronic Systems,2001,37(3):794-809.
[3]李刚,朱敏慧.基于扩展小波变换的机载SAR运动目标参数估计[J].电子与信息学报,2001,23(11):1154-1161. Li Gang,Zhu Min-hui.Airborne SAR moving target parameter estimation based on extended wavelet transform[J].Journal of Electronics and Information Technology,2001,23(11):1154-1161.(in Chinese)
[4]Sun H,Liu G,Gu H,et al.Application of the fractional Fourier transform to moving target detection in airborne SAR[J].IEEE Transactions on Aerospace and Electronic Systems,2002,38(4):1416-1424.
[5]郑明洁,杨汝良.一种改进的DPCA运动目标检测方法[J].电子学报,2004,32(9):1429-1432. Zheng Ming-jie,Yang Ru-liang.An improved DPCA moving targets detecting algorithm[J].Acta Electronica Sinica,2004,32(9):1429-1432.(in Chinese)
[6]Ender J H G.Space-Time processing for multichannel synthetic aperture radar[J].Electronics & Communication Engineering Journal,1999,11(1):29-38.
[7]Cerutti-Maori D,Sikaneta I.Optimum GMTI processing for space-based SAR/GMTI systems—theoretical derivation[A].European Conference on Synthetic Aperture Radar (EUSAR)[C].Aachen,Germany:VDE,2010.1-4.
[8]Cerutti-Maori D,Gierull C H,Ender J H G.Optimum SAR/GMTI processing and its application to the radar satellite RADARSAT-2 for traffic monitoring [J].IEEE Transactions on Geoscience and Remote Sensing,2012,50(10):3868-3881.
[9]Cerutti-Maori D,Sikaneta I.A generalization of DPCA processing for multichannel SAR/GMTI radars[J].IEEE Transactions on Geoscience and Remote Sensing,2013,51(1):560-572.
[10]Bidon S,Besson O,Tourneret J Y.Knowledge-aided STAP in heterogeneous clutter using a hierarchical bayesian algorithm[J].IEEE Transactions on Aerospace and Electronic Systems,2011,47(3):1863-1879.
[11]He Ming-dong,Cao Jian-shu.Recursive KA-STAP algorithm based on QR decomposition[A].2013 International Workshop on Microwave and Millimeter Wave Circuits and System Technology (MMWCST)[C].Chengdu:IEEE,2013.391-394.
[12]Chapin E,Chen C W.Airborne along-track interferometry for GMTI[J].IEEE Transactions on Aerospace and Electronic Systems,2009,24(5):13-18.
[13]Yin Kui-ying,Jin Lin,Zhang Chang-chun,et al.SAR automatic target recognition based on shadow contour[A].2013 Fourth International Conference on Digital Manufacturing and Automation (ICDMA)[C].Qingdao:IEEE,2013.1179-1183.
[14]Tison C,Tupin F,et al.Retrieval of building shapes from shadows in high resolution SAR interferometric images[A].Proceedings of the 2004 IEEE International Geoscience and Remote Sensing Symposium(IGARSS)[C].Alaska,USA:IEEE,2014.1788-1791.
[15]J Cui,J Gudnason,M Brookes.Radar shadow and superresolution features for automatic recognition of MSTAR targets[A].Proceeding of IEEE International Radar Conference[C].Arlington,VA:IEEE,2005.534-539.
[16]史洪印,侯志涛,郭秀花,等.基于阴影检测的单幅高分辨SAR图像动目标检测方法[J].信号处理,2012,28(12):1706-1713. Shi Hong-yin,Hou Zhi-tao,Guo xiu-hua.Moving targets indication method in single high resolution SAR imagery based on shadow detection[J].Signal Processing,2012,28(12):1706-1713.(in Chinese)
[17]Jahangir M.Moving target detection for synthetic aperture radar via shadow detection[A].2007 IET International Conference on Radar Systems[C].Edinburgh,UK:IET,2007.1-5.
[18]束宇翔,廖桂生,杨志伟.维纳滤波最优权修正导向矢量的SAR-GMTI动目标径向速度估计方法[J].电子学报,2011,39(9):1986-1991. Shu Yu-xiang,Liao Gui-sheng,Yang Zhi-wei.Radial velocity estimation of moving targets based on modifying the steering vector with wiener optimal weights in SAR-GMTI radar system[J].Acta Electronica Sinica,2011,39(9):1986-1991.(in Chinese)
[19]Liu Bao-chang,Yin Kui-ying,Li Yong-kang,et al.An improvement in multichannel SAR-GMTI detection in heterogeneous environments[J].IEEE Transactions on Geoscience and Remote Sensing,2015,52(2):810-827.
[20]程鹏飞,闫浩文,韩振辉.一个求解多边形最小面积外接矩形的算法[J].工程图学学报,2008,29(1):128-132. Cheng Peng-fei,Yan Hao-wen,Han Zhen-hui.A solving minimum area bounding rectangle algorithm for a polygon[J].Journal of Engineering Graphics,2008,29(1):128-132.(in Chinese)
[21]Otsu N.A Threshold Selection Method from Gray-Level Histogram[J].IEEE Transactions on Systems Man and Cybernetics,1979,9(1):62-66.

杨志伟 男,1980年出生于四川省南充市.现为西安电子科技大学雷达信号处理重点实验室副教授,博士生导师.从事多维阵列自适应抗干扰和动目标侦察、监视与预警技术研究.近五年,在“十二五”航天背景预研,航空高分辨率对地观察专项,国家自然科学基金重点项目,“军863”项目等持续资助下,为提升对地监视能力提供了处理核心技术,发表学术论文80余篇,国家发明专利授权9项,获得军队科技进步三等奖1项.
E-mail:yangzw@xidian.edu.cn

张 蕊 女,1990年生于江苏徐州市,西安电子科技大学硕士研究生,研究方向为运动平台雷达动目标检测.
E-mail:cheerone@sina.com
许华健 男,1990年生于福建政和县,西安电子科技大学博士研究生,研究方向为运动平台雷达动目标检测、空时自适应处理.
E-mail:huajianxu@stu.xidian.edu.cn
廖桂生 男,1963年生于广西桂林市.现为西安电子科技大学雷达信号处理重点实验室教授,博士生导师,现主要从事雷达探测系统信号处理、包括空时自适应处理,天基预警和阵列信号处理等研究领域.
E-mail:gsliao@xidian.edu.cn
A Multi-features-Aided Method for Extended Target Detection of SAR-GMTI
YANG Zhi-wei,ZHANG Rui,XU Hua-jian,LIAO Gui-sheng,YANG Jian
(NationalLaboratoryofRadarSignalProcessing,XidianUniversity,Xi’an,Shaanxi710071,China)
This paper deals with the target-detection issue that a high-resolution synthetic aperture radar (SAR)-ground moving target indication (GMTI) system under remote surveillance mode faces many challenges,i.e.,target-diffusing and low signal-to-noise ratio,and based on the fact that extended targets with conventional target detection methods based on the poin target cause decrease in detection performance,a Shape-Shadow-Aided Moving Target Detector(S2A-MTD) is proposed for extended target detection of airborne multichannel SAR-GMTI.First,the shaped information of a target is obtained when the residual image with adaptive clutter suppression clustered.Then,shadow-template matched with shaped information of a target is evaluated,which is based on the model of the geometric relationship on a moving extended target and its shadow.Meanwhile,according to estimative radial velocity,position-matched condition with shadow is generated.Finally,taking all the information in shape,position and amplitude of shadow into consideration is to eliminate false targets that not satisfy with matching conditions,so as to reduce false alarms.the simulation results show the validity that this method improves the detection performance of the extended target under low signal-to-noise ratio.
synthetic aperture radar (SAR);ground moving target indication (GMTI);extended target;shaped-shadow-aided;template matching
2015-05-12;
2015-12-09;责任编辑:蓝红杰
国家自然科学基金(No.61501471);国防预研基金(No.9140xxx005)
TN957
A
0372-2112 (2016)12-2916-08
��学报URL:http://www.ejournal.org.cn
10.3969/j.issn.0372-2112.2016.12.015
