基于坡度和区域生长的城市LiDAR点云滤波方法
2016-12-26张宁宁杨英宝
张宁宁,杨英宝,于 双
(1.河海大学 地球科学与工程学院,江苏 南京 210098)
基于坡度和区域生长的城市LiDAR点云滤波方法
张宁宁1,杨英宝1,于 双1
(1.河海大学 地球科学与工程学院,江苏 南京 210098)

在分析坡度滤波算法原理的基础上,结合区域生长原理进行改进;选取国际摄影测量与遥感学会提供的部分城市滤波样本数据进行实验,将实验结果与Roggero坡度滤波算法和Sithole坡度滤波算法的结果进行比较。结果表明,该方法能较好地降低一类误差,对城市LiDAR点云建筑区数据有一定的适用性。
坡度;区域生长;LiDAR;滤波
点云滤波是LiDAR数据处理的首要任务,主要目的是将点云分成地面点和非地面点[1],为后续道路、建筑物等地物点信息的提取打下基础。其原理大致可分为2类:①根据激光脚点数据的回波强度信息进行滤波。该类方法参考航空影像的分类原理,利用回波强度信息将LiDAR点云数据转化为灰度图像,通过分析灰度值的分布,确定出地面点的灰度范围,从而将地面点从原始点云数据中过滤出来;在一定程度上发挥了点云数据自身的优势,但难以适用于大部分地形[2,3]。②基于高程突变信息进行的滤波[4-10]。该类方法是目前绝大多数机载LiDAR数据滤波算法所采用的原理[1]。基于高程突变信息进行滤波,首先是由Vosselman[4]提出的。该方法原理简单、实现方便,因充分考虑到地形坡度问题,在地形平坦和坡度变化平缓的区域都有很强的适应性[5,11,12]。但对于面积较大且相对较低的地物点,其与最邻近的地面点间的距离越大,高差阈值就会随之增大,这些点被正确判为地物点的可能性就会降低。虽然经Sithole改进后的滤波算法能适应陡坡地形,但在大型建筑物区和低矮植被区滤波结果仍存在问题[13]。此外,坡度滤波算法需要计算数据集中每个点的坡度,计算量大、速度慢。本文针对基于坡度滤波算法的缺点,结合区域生长算法予以改进,快速准确地分离了地物点和地面点。
1 基于坡度的滤波原理
基于坡度变化的滤波方法是通过比较两点间的高差值是否满足高差函数来判断点是否为地面点。该方法认为地形表面是一个平缓光滑的曲面,局部区域内地形发生急剧变化的可能性较小,即相邻两点间的高差值超过一定的阈值[4]时,两点间距离越小,高程值大的点属于地面点的可能性就小。定义基于坡度的滤波算法的高差函数是一种基于两点间高差值和距离值的滤波函数,不仅表示了地形,还包括激光点的信息,可由预估的测区地形最大坡度百分数及激光点的标准偏差确定。其公式为:

式中,S为最大地形坡度百分数;d为两点间的水平距离;σz为标准偏差。最大距离dmax影响高差函数的值,Vosselman建议dmax设为10 m。
2 基于坡度和区域生长的滤波原理
对于离散机载LiDAR点云滤波而言,结合区域生长方法主要解决3个问题:地面种子点的正确选择、地面点生长准则的确定和停止迭代条件的判断。本文在对原始点云进行粗差剔除的基础上,使用规则格网组织点云数据(如式(2)),不进行插值;并以测区中最大建筑物的尺寸为滤波窗口大小对数据进行划分,选取滤波窗口中的最低点构成地面种子点集,以种子点集中的种子点为中心进行8邻域搜索。判断待定点与已知种子点的高差是否满足高差函数阈值(如式(1));若满足条件则该点被判为地面点的次数加1,并将其作为新的种子点进行生长,直到没有点满足生长准则即停止。最后统计每点被判为地面点的概率P,设定概率阈值实现地面点与非地面点之间的分类,减少分类误差的产生。

式中,(X,Y)为网格号;(x,y)为点云的平面坐标;(xmin,ymin)为整个数据集的最小平面坐标;n为网格单元的大小。格网的大小由点密度决定,一般能保证每个单元格内有1、2点即可。

式中,N为点被判为地面点的次数;M为点被判断的次数。引入一个限值a(0.1~0.5),当P≤1-a时,则认为该点原为地物点,被误判为地面点,需要将其从地面点集中剔除。具体算法流程如图1所示。

图1 基于坡度和区域生长的算法流程图
3 实验结果与分析
本文采用国际摄影测量与遥感学会(ISPRS)提供的专门用于滤波算法测试的样本(样本11~24)数据进行实验,实验采用统计3类误差的定量评价方法分析滤波效果。3类误差检验是LiDAR点云数据滤波质量评价中最常用的方法,可分为一类误差(地面点错分为地物点的误差)、二类误差(地物点错分为地面点的误差)和总误差(对一类误差和二类误差的加权求和);一、二类误差反映了算法的适应性,总误差则反映了算法的可行性。本文在适当增加二类误差的前提下,重点减少一类误差;并与Roggero坡度滤波算法和Sithole坡度滤波算法进行比较。该数据点间距为1.0~1.5 m,每m2约采样0.67个点,点云的高程误差基本在0.2~0.3 m。该实验区属于典型的城市区域,地面变化较为平缓,地物复杂,含有大型规则建筑物、不规则建筑物、道路桥梁和小型隧道等。图2为各样本误差分布图。图3~5为本文算法与Roggero坡度滤波算法和Sithole坡度滤波算法对各样本滤波后的3类误差统计结果对比图。

图2 各样本误差分布图
由图2可知,基于坡度和区域生长的滤波算法能够滤除多数的地物点,特别是建筑物点(样本12、样本22、样本23、样本24),但对于桥梁(样本21、样本22)、汽车(样本12)、低矮植被、陡坡植被(样本11)等地物点的滤波效果仍不理想。另外,从样本11和样本24可知,在地形起伏地区基于坡度和区域生长的滤波结果存在较多的错判点,说明本文方法不能避免地形条件的影响。

图3 一类误差对比图
由图3可知,经本文滤波算法滤波后,所有样本的一类误差较Roggero坡度滤波算法和Sithole坡度滤波算法的一类误差都有所减少,即有更少的地面点被错判为地物点,说明本文改进的滤波算法行之有效。例如,样本12、样本22、样本23和样本24都包含较多大型且结构复杂建筑物,且这些建筑物点为样本的主要地物点,本文滤波算法都能将其很好地滤除。
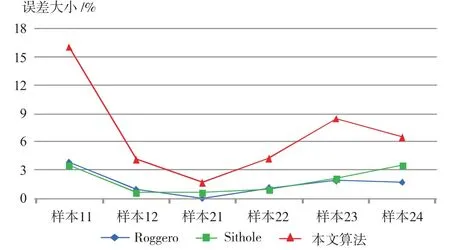
图4 二类误差对比图
由图4可知,经本文滤波算法滤波后,所有样本的二类误差较Roggero坡度滤波算法和Sithole坡度滤波算法的二类误差都有所增加,即有更多的地物点被错判为地面点。这一方面是由于本文滤波算法是在适当增加二类误差的同时降低一类误差,另一方面是由于本文滤波算法无法避免地形条件影响造成的。例如,样本11地形陡峭、起伏大且场景较复杂,陡坡上的很多房屋点、植被点却被误判为地面点(图2);对于样本12和样本23,本文滤波算法未能滤除其中很多的汽车点、低矮植被点(图2);样本21和样本22所包含的附属地物——桥梁也未能完全正确滤除。
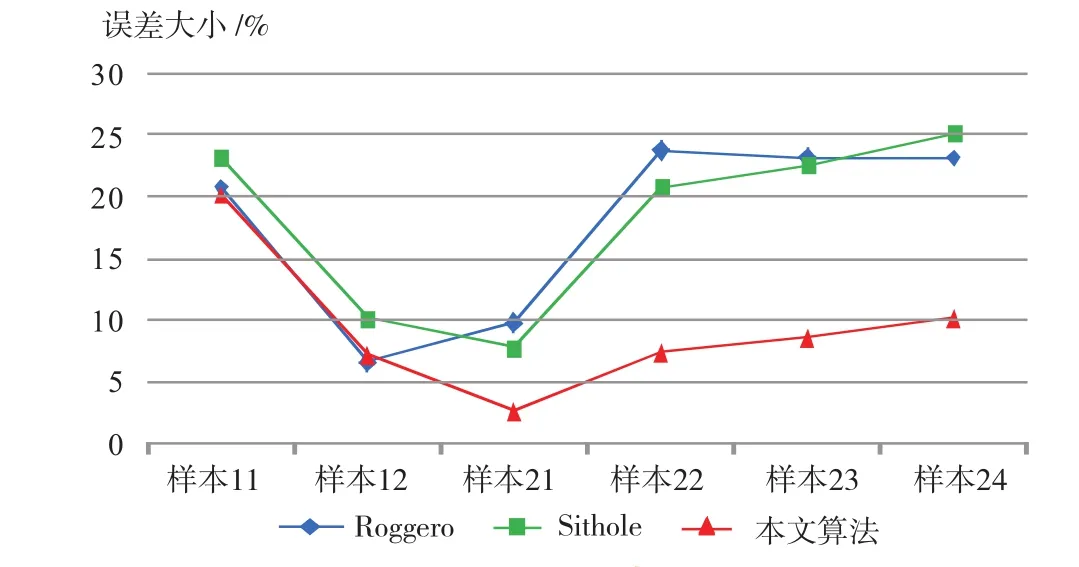
图5 总误差对比图
由图5可知,经本文滤波算法滤波后,所有样本的总误差均近似等于或小于Roggero坡度滤波算法和Sithole坡度滤波算法的总误差。这说明本文滤波算法用于城市点云数据滤波是可行的。
相较于其他两种滤波算法,本文所述方法各样本的一类误差均减小,二类误差均增大但在可控制的范围内,总误差近似等于或小于其他两种算法的总误差,说明本文滤波算法能正确选择地面种子点,通过区域生长算法得到准确的数字地面模型,较好地保留了地形特征;同时能完整地滤除面积较大且结构复杂的建筑物,但对于一些低矮植被、陡坡植被、汽车等地物点的滤波效果仍不理想,且受地形影响,适用于地形较为平坦的城市区域。
4 结 语
本文提出结合区域生长原理改进基于坡度滤波算法,并通过选取ISPRS提供的部分城区样本数据与Roggero坡度滤波算法和Sithole坡度滤波算法进行对比实验。算法基于原始点云滤波,无需内插或建立索引结构;在保证了数据原始精度的同时,每次只选取种子点8邻域内的点参与计算,减少了计算量,能快速实现点云数据滤波;对大型且结构复杂的建筑物滤波效果明显,适合一些比较平坦的城市区域。但是如何去除地形条件的影响,滤除低矮植被、陡坡植被、汽车等非地面点,在保证一类误差即地面点滤波精度的同时,降低二类误差是本文需进一步改进的地方。
[1] 余洁,张国宁,秦昆,等. LiDAR数据的过滤方法探讨[J].地理空间信息, 2006,4(4):8-10
[2] 张小红.利用机载LiDAR两次回波高程之差分类激光脚点[J].测绘科学,2006,31(4): 48-50
[3] 许晓东,张小红,程世来.航空LiDAR的多次回波探测方法及其在滤波中的应用[J].武汉大学学报:信息科学版, 2007,32(11):1 011-1 015
[4] George Vosselman. Slope Based Filtering of Laser Altimetry Data[J].International Archives of Photogrammetry and Remote Sensing,2000,33(B3):935-942
[5] Sithole G. Filtering of Laser Altimetry Data Using a Slope Adaptive Filter[J]. International Archives of Photogrammetry and Remote Sensing, 2001,34(3-W4): 203-210
[6] Peter Axelsson. DEM Generation from Laser Scanner Data Using Adaptive TIN Models [J].International Archives of Photogrammetry and Remote Sensing, 2000, 33(B4):111-118
[7] 左志权,张祖勋,张剑清,等.知识引导下的城区LiDAR点云高精度三角网渐进滤波方法[J].测绘学报,2012,41(2):246-251
[8] 张小红.机载激光扫描测高数据滤波及地物提取[D].武汉:武汉大学,2002
[9] Kilian J, Haala N, Englich M. Capturing and Evaluation of Airborne Laser Scanner Data[J]. International Archives of Photogrammetry and Remote Sensing, 1996, 32(B3):383-388
[10] Hug C, Wehr A. Detecting and Identifying Topographic Objects in Imaging Laser Altimetry Data[J]. International Archives of Photogrammetry and Remote Sensing, 1997, 32(3-4W2):19-26
[11] Liu Xiaoye. Airborne LiDAR for Dem Generation: Some Critical Issues[J]. Progress in Physical Geography, 2008, 32:31-49
[12] George Sithole, George Vosselman. Experimental Comparison of Filter Algorithms for Bare-earth Extraction from Airborne Laser Scanning Point Clouds[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2004, 59: 85-101
[13] Meng Xuelian, Currit Nate, Zhao Kaiguang. Ground Filtering Algorithms for Airborne LiDAR Data: a Review of Critical Issues[J]. Remote Sensing, 2010(2):833-860
P23
B
1672-4623(2016)03-0030-03
10.3969/j.issn.1672-4623.2016.03.010
张宁宁,硕士,主要研究方向为机载LiDAR点云数据处理。
2015-06-09。
项目来源:国家自然科学基金资助项目 (41271538)。
