基于动态充油过程联合仿真的液力缓速器控制系统优化
2016-11-22马文星葛林杉刘春宝李雪松
马文星, 葛林杉, 刘春宝, 徐 东, 李雪松
(1.吉林大学 机械科学与工程学院, 吉林,长春 130022;2.吉林大学 汽车仿真与控制国家重点实验室, 吉林,长春 130022)
基于动态充油过程联合仿真的液力缓速器控制系统优化
马文星1, 葛林杉1, 刘春宝1, 徐 东1, 李雪松2
(1.吉林大学 机械科学与工程学院, 吉林,长春 130022;2.吉林大学 汽车仿真与控制国家重点实验室, 吉林,长春 130022)
为达到车辆制动过程中液力缓速器快速响应的要求,通过在液力缓速器控制阀中增加分流结构与调整出口节流阀控制信号两种方式对液力缓速器控制系统进行了优化.为验证优化后控制系统的性能,通过对电液比例先导阀、液力缓速器及优化前后的液力缓速器控制阀联合仿真,得到优化前后液力缓速器进出口流量、充液时间及变速箱润滑系统进口流量等结果.通过对比分析发现优化后的液力缓速器响应快速.并且优化后的控制系统在整个循环过程中具有增大分流区间流量的作用,而对其他区间流量的变化趋势没有影响. 结果表明这种控制方法可以用于液力缓速器,同时也可以用于其他充液元件来减少响应时间.
液力缓速器;优化;联合仿真;响应时间
液力缓速器以其高速制动转矩大、制动舒适、油耗消耗低等优点作为一种车辆辅助制动装置得到了广泛的应用.在紧急制动工况下,液力缓速器工作腔内的工作液体需要在很短的时间内达到设定的充液量,从而达到紧急制动所需要的制动转矩. 严军[1]建立了液力缓速器模型,并模拟说明了出口节流阀开度对液力缓速器系统的压力和流量有较大影响,节流阀开度最小时,排油节流作用最大,减速器的充液率最高. 李雪松和袁哲[2-3]分别从理论层面对液力缓速器充油时间进行了计算,为液力缓速器动态充油过程提供了参考. 宋建军[4]对开式液力缓速器建模进行了研究,并设计了一套液力缓速器控制系统,采用出口节流控制方式对液力缓速器进行了仿真研究. 出口节流控制是液力缓速器动态充油过程常规的控制方式,从液力缓速器充油过程来看,单方面采用出口节流方案可以缩短液力缓速器的响应时间,但并不能达到最优的效果.
文中对液力缓速器控制系统进行优化,目的是缩短液力缓速器的响应时间.液力缓速器整个充液过程的充液量与进出口流量有关. 在液压泵流量不变的情况下,增加分流结构增大液力缓速器进口流量,同时调整出口节流控制方式调节出口流量进一步缩短液力缓速器响应时间.文中应用的液力缓速器有0~4共5个挡位,挡位为0时,液力缓速器不工作;挡位位于1~4时,液力缓速器工作腔的充液率分别为25%,50%,75%和100%.电液比例先导阀控制液力缓速器控制阀,液力缓速器工作时,驾驶员人为操作将液力缓速器设置到不同挡位,输入相应挡位对应的电信号,液力缓速器在电液比例先导阀的控制下实现制动功能.
1 液力缓速器控制系统优化
如图1所示,常规液力缓速器控制系统中,不工作时,从液压泵出来的液压油经过散热器散热之后直接进入变速箱润滑系统.缓速器工作时,先导阀启动,来自液压泵的液压油流入液力缓速器,通过液力缓速器出口节流阀流向散热器,散热后流向变速箱润滑系统.这样液压油在液压泵、液力缓速器控制阀、液力缓速器、节流阀、散热器和油箱之间进行循环流动. 常规控制系统控制阀结构图见图2.
缓速器工作时,液压油由液压泵出油口A经节流孔a流向缓速器入口B,流出缓速器出口C经节流阀阀口D流出,经过节流孔c流向散热器入口F.
则节流孔a的压力流量特性为
(1)
式中:Cd为节流阀流量系数;x为阀芯位移,mm;da为节流口a处阀芯直径,mm;ρ为油液密度,kg/m3;Sa为a处油封长度,mm;pA为阀芯腔A的压力,MPa;pB为阀芯腔B的压力,MPa.
对于式(1),当液力缓速器采用压力入口设置时,pB为定值,液压泵出口压力pA为定值,充液率设定之后,qVa为定值.
节流阀阀口d的压力流量特性为
(2)
式中:pC为缓速器出口压力,MPa;pE为节流阀出口压力,MPa;Aa(u,pC)为过流面积,mm2,为充液率u和pC的函数.
对于式(2),从使用角度出发,选用的节流阀满足阀口两端压差变化引起很小的流量变化.因此当充液率设定之后,且不考虑阀口两端压差变化所引起的流量变化时,qVd为定值.
对于如图1所示控制系统中的液力缓速器7来说,时间t内充液量为
(3)
当充液率一定时,式(3)可简化为
(4)
从式(4)可以看出液力缓速器充液量与进出口流量差有关,因此在液压泵流量不变的条件下对液力缓速器控制系统进行两方面的优化:考虑液压油循环流动过程,通过增加分流结构增加液力缓速器进口流量;同时出口可变节流口引入进口流量控制信号,与充液率信号、转速信号、出口压力信号一同控制节流阀过流面积来调整出口流量.改进后液力缓速器控制阀结构如图3所示,结构调整如图3中标识1位置.
节流孔g压力流量特性为
(5)
式中:Lg表示节流口g的油封长度,mm;pG表示阀芯腔G的压力,MPa;dg表示节流口g处阀体直径,mm.
控制系统优化后缓速器充液量为
(6)
式中:a(u,pC,qVa+qVg)表示节流阀过流面积,mm2,为充液率信号、缓速器出口压力信号和进口流量信号的函数.
2 控制系统联合仿真方法
文中综合利用AMESIM软件中机械模块、信号、控制库、液压元件库(hydraulic)和液压元件设计库(HCD)建立先导控制阀、液力缓速器控制阀和液力缓速器的仿真模型及液力缓速器控制系统联合仿真模型.
2.1 电液比例先导阀模型
结合图1控制系统原理,液力缓速器不工作时,由液压泵出来的液压油直接流回油箱.液力缓速器工作时,电磁阀得电,电液比例先导阀右位工作,液压油经过先导阀流向液力缓速器控制阀,并推动阀芯运动,液力缓速器开始工作,如图4所示.
电液比例先导阀阀芯开启过程受力平衡方程为
(7)
式中:x为阀芯位移,mm;Ks为弹簧刚度,N/m;x0为弹簧预压缩量,mm;qVK为节流口K的流量,L/min;vK为节流口K的流速,m/s;αK为节流口K的液流角,(°);pN为N腔压力;d和d1分别为先导阀阀芯、阀杆直径,mm;LKL为流程长度,mm;B为液体黏性阻力系数,N/(m·s-1).
由电液比例先导阀结构、工作原理及受力平衡方程,对电液比例先导阀进行建模[5-9],模型如图5所示.
2.2 液力缓速器控制阀模型
结合图3,改进后液力缓速器控制阀阀芯开启受力平衡方程为
(8)

(9)
由改进后控制阀结构、工作原理及受力平衡方程,对改进后液力缓速器控制阀进行建模,如图6所示.改进前的控制阀模型与改进后模型相比少了一个产生回流的元件,如图6中标识2位置,改进前的模型如图7所示.
2.3 液力缓速器模型
液力缓速器在实际工作中充液过程比较复杂,液压油通过进油口进入液力缓速器,在转子的带动下冲击定子叶片,从定子流出的液压油又流向转子.液压油在循环流动过程中,经过出油口时,一部分经出油口流出,剩余液压油留在液力缓速器工作腔中用于增加液力缓速器的充液率.液力缓速器的制动转矩与转子转速和充液率的关系可以用式(10)的形式表示[4]
T=745.83(n/1 000)2qV-12.32(n/1 000)qV+

(10)
式中:T为液力缓速器制动转矩,N·m;n为液力缓速器转子转速,r/min;qV为液力缓速器充液率,qV为
(11)
式中:V为工作腔实际充液容积,m3;V0为工作腔容积,m3.
从式(10)可以看出,液力缓速器在发动机正常工作时,制动转矩T与充液率q是正比例关系,随着充液率的增加,制动转矩增加.
液力缓速器入口设置为压力入口,由于优化前后液力缓速器入口流量不同,进口压力采用不同的压力值.出口采用节流控制. 如图使用活塞工作腔代替液力缓速器工作腔,用与工作腔连接的质量块位移数据表示液力缓速器的充液率,应用节流阀表示液力缓速器出口节流控制,控制参数由输入信号、充液量、转速信号及进口流量决定,图8为液力缓速器模型.
2.4 液力缓速器及其控制系统联合仿真模型
分别将电液比例先导阀模型、改进前后的液力缓速器控制阀模型、液力缓速器模型进行组合得到优化前后液力缓速器控制系统的联合仿真模型.
3 动态充液过程联合仿真及结果分析
液力缓速器控制系统联合仿真参数如表1.
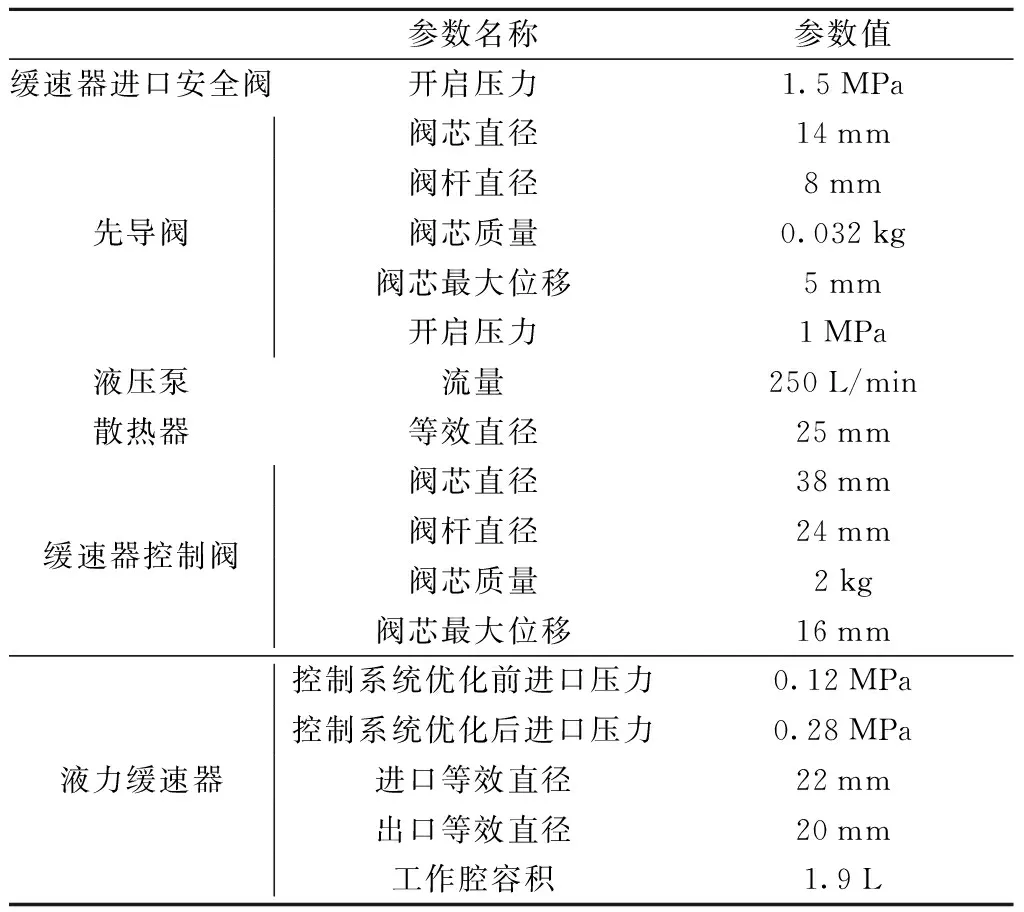
表1 联合仿真参数
液力缓速器从开始充油到达到目标充液率的过程中,充油的前段工作腔内部油量增加很快,但到后段慢慢减速,在充油量接近目标充液率时,液力缓速器已经可以起到相应的制动效果,所以在仿真中选用近似充液率22%,46%,70%,92%分别代替实际充液率25%,50%,75%,100%. 液力缓速器模型中质量块最大位移为760 mm,代表满充液状态,其他数据对照如表2.
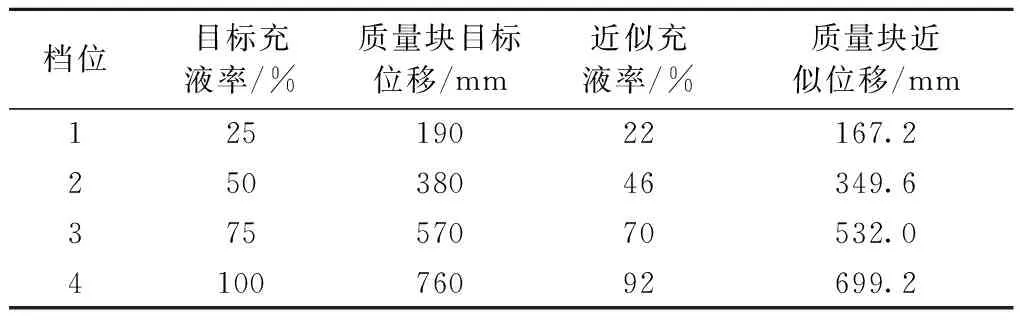
档位目标充液率/%质量块目标位移/mm近似充液率/%质量块近似位移/mm12519022167.225038046349.637557070532.0410076092699.2
3.1 流量对比分析
控制系统优化前后缓速器进口流量对比分析如图9所示.
优化前后缓速器进出口流量差对比分析如图10所示.
图中虚、实线与x轴所围成的面积分别为控制系统优化前后液力缓速器的充液量.对于充液率为25%和50%时,在A1和A2点附近两条曲线变化趋势非常接近,实线和虚线所包围的区域面积极小,而充液率为75%和100%时A3B3段和A4B4段实线与虚线各自形成一个很小的面积,意味着在A1、A2、B3和B4的时间点之前常规控制系统充液量要大.而在充液率为25%,75%的A1B1段、A2B2段和充液率为75%,100%的B3C3段、B4C4段,实线明显高于虚线,由于液力缓速器充液量一定,所以A1B1、A2B2、B3C3、B4C4段面积一定大于B1、B2、C3、C4点之后两条曲线包围的面积,即在A1B1、A2B2、B3C3、B4C4段时间内优化后的控制系统充液量要大,充液速度快.在B1、B2、C3、C4之后虚线高于实线,常规控制系统充液量要大,但此时已经处于液力缓速器的缓慢充液阶段,充液量的变化对充液速度的影响不大,常规控制系统在充液速度上面一直落后于优化控制系统.总体来看,优化控制系统液力缓速器比常规控制系统达到设定充液率的时间要短.
3.2 液力缓速器充液时间对比分析
液力缓速器充液率分别为25%,50%,75%,100%时的充液速度对比见表3.
由表3可以看出,在液力缓速器不同充液率下优化控制系统的充液时间均小于常规控制系统,即在使用相同的液力缓速器的情况下,达到相同制动转矩时优化控制系统比常规控制系统所用的时间小.对于工作腔容积为1.9 L的液力缓速器来说,在250 L/min的进口流量的条件下,满充液时间为1.76 s比较符合液力缓速器充液时间的实际工作值,这也从侧面说明液力缓速器的模型是合理的.
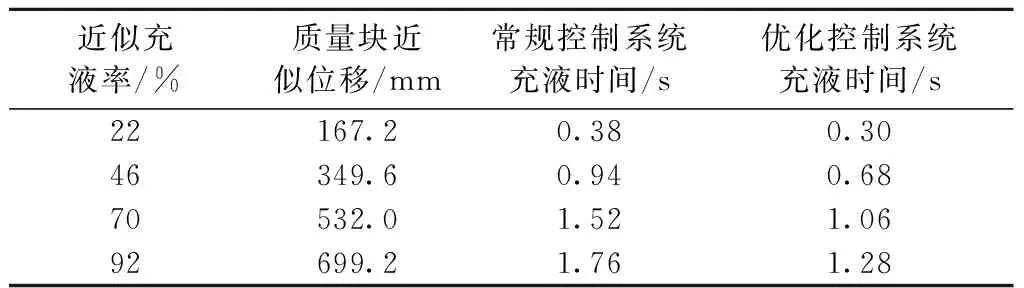
表3 液力缓速器近似充液时间对照表
3.3 变速箱润滑系统进口流量对比分析
流入变速箱润滑系统的液压油为变速箱内部传动机构提供润滑,如图11所示.
优化前后控制系统的变速箱润滑系统进口流量变化趋势接近,从250 L/min快速下降,之后缓慢上升,稳定后维持在250 L/min. 对于常规控制系统,润滑系统进口流量的变化是由于液力缓速器充液引起的,而对于优化控制系统润滑系统进口流量的变化是由于分流及液力缓速器充液共同作用引起的. 液力缓速器开始进行充液时润滑系统进口流量出现比较大的跌落趋势,图中A1B1、A2B2、A3B3、A4B4段,两种控制系统流量开始跌落的数值非常接近. 在B1C1、B2C2、B3C3、B4C4段优化控制系统流量比常规控制系统流量回升速度慢,原因是优化控制系统分流造成的. 在C1D1、C2D2、C3D3、C4D4段优化控制系统液压油流量回升速度快,并且提前达到250 L/min的稳定状态,原因是分流的流量增加到液力缓速器支路,使得液力缓速器出口流量也相应增加,进而流向变速箱润滑系统使进口的流量增加. 由此可以得出控制系统优化前后润滑系统进口流量的上升速度及达到稳定的时间有微小差别,而在流量的数值上面没有差别.
4 结 论
对一种常规的液力缓速器控制系统进行了优化,增加了分流结构及调整出口可变节流孔控制信号,并且对阀芯及阀体结构进行了改进,对优化前后控制系统的各部分进行建模及联合仿真,通过进口流量、进出口流量差、充液时间及润滑系统进油口流量的详细对比分析,说明了使用优化后控制系统的液力缓速器比常规控制系统响应快速,进一步说明了优化控制系统在整个循环过程中具有增大分流区间流量的作用,而对其他区间流量只在变化速度及达到稳定状态的时间上有着微小的影响.
所采用的液力缓速器优化控制方法不仅可以应用在液力缓速器上面,对于其他类似的充液元件都可以应用这种优化方法进行控制,以便缩短充液元件的响应时间.
[1] 严军.大功率液力减速器设计与制动力矩控制算法研究[D].武汉:武汉理工大学,2010.
Yan Jun. Research on high power hydraulic retarder design and brake torque control algorithm[D]. Wuhan: Wuhan University of Technology, 2010. (in Chinese)
[2] 袁哲,马文星,卢秀泉,等.液力减速器动态制动性能预测分析[J].吉林大学学报:工学版,2013(增刊1):160-164.
Yuan Zhe, Ma Wenxing, Lu Xiuquan, et al. Dynamic braking performance prediction and analysis of hydrodynamic retarder[J]. Journal of Jilin University: Engineering and Technology Edition, 2013(suppl 1):160-164. (in Chinese)
[3] 李雪松.车辆液力缓速器三维流场分析与特性计算[D].长春:吉林大学,2006.
Li Xuesong. Analysis on three-dimension flow field and characteristics calculation of vehicular hydrodynamic retarder[D]. Changchun: Jilin University, 2006. (in Chinese)
[4] 宋建军.重型载重汽车液力缓速器及其控制系统研究[D].长春:吉林大学,2013.
Song Jianjun. Research on hydrodynamic retarder and its control system of heavy truck[D]. Changchun: Jilin University, 2013. (in Chinese)
[5] Wang Chengyu, Chang Hanbao, Xu Haicheng, et.al. Simulation research of flow-control device in AMESIM[C]∥Proceedings of IEEE 2nd International Conference on Computing, Control and Industrial Engineering. Wuhan, China: IEEE Computer Society, 2011,1:231-234.
[6] Zhuo Guirong, Wang Haixi. Modeling and simulation of high speed on-off valve based on AMESim[C]∥Proceedings of 2nd Annual Conference on Electrical and Control Engineering. Yichang, China: IEEE Computer Society, 2011:2342-2346.
[7] Yuan Shihao, Yin Chenbo. Study on the compensated flow control valve based on AMESim code[J]. International Journal of Digital Content Technology and its Applications, 2012,17(6):105-116.
[8] Lin Yijun, Wang Yongliang, Li Xin, et al. Simulation and optimization of electro-hydraulic position servo system based on the AMESim/Matlab [C]∥Proceedings of 2013 5th International Conference on Computational and Information Sciences. Shiyan, China: IEEE Computer Society, 2013:1792-1795.
[9] Tao Zaikun, Tian Chun, Wu Mengling. Fault simulation of relay valve based on AMEsim[C]∥Proceedings of 2012 International Conference on Measurement, Instrumentation and Automation. Guangzhou, China: Trans Tech Publications, 2013,241-244:1297-1305.
(责任编辑:孙竹凤)
Optimization of the Hydraulic Retarder Control System Based on Joint Simulation of Dynamic Liquid-Filled Process
MA Wen-xing1, GE Lin-shan1, LIU Chun-bao1, XU Dong1, LI Xue-song2
(1.College of Mechanical Science and Engineering, Jilin University, Changchun, Jilin 130022, China;2.State Key Laboratory of Automotive Simulation and Control, Jilin University, Changchun, Jilin 130022, China)
In order to reach the rapid response requirement of the hydraulic retarder during vehicle braking process, the optimization of the hydraulic retarder control system was realized through two ways,increasing shunt structure in the hydraulic retarder control valve and adjusting the control signal of outlet throttle valve. To verify the performance of the optimized control system, the electro-hydraulic proportional pilot valve, the hydraulic retarder and the hydraulic retarder control valve before and after optimization were simulated jointly. The results about the inlet and outlet flow rate, the liquid-filled time of the hydraulic retarder, the inlet and outlet flow rate of the lubricant device of the gearbox, were acquired. The contrast analysis results show that, the response speed of the optimized hydraulic retarder is more rapid than that before optimization. And the optimized control system can increase the flow rate of shunt section and has no effect on the change trend of flow rate in other sections throughout the process cycle. The control method is suitable for the hydraulic retarder and it can also be used for other liquid components to reduce the response time.
hydraulic retarder; optimization; joint simulation; response time
2014-05-05
国家“八六三”计划项目(2014AA041502);吉林省科技厅基金资助项目 (120102JC01032095);高性能计算基金资助项目(20130101179JC-04);国家自然科学基金资助项目(51305156)
马文星(1962—),男,博士,教授,E-mail:mawx@jlu.edu.cn.
刘春宝(1980—),男,博士,副教授,E-mail:liuanbc@126.com.
TH 137.32
A
1001-0645(2016)01-0001-07
10.15918/j.tbit1001-0645.2016.01.001