利用受限张力的拖曳变轨欠驱动姿态稳定策略
2016-11-18王秉亨孟中杰黄攀峰
王秉亨, 孟中杰,*, 黄攀峰
1.西北工业大学 航天学院智能机器人研究中心, 西安 710072 2.西北工业大学 航天飞行动力学技术重点实验室, 西安 710072
利用受限张力的拖曳变轨欠驱动姿态稳定策略
王秉亨1,2, 孟中杰1,2,*, 黄攀峰1,2
1.西北工业大学 航天学院智能机器人研究中心, 西安 710072 2.西北工业大学 航天飞行动力学技术重点实验室, 西安 710072
在空间绳系拖曳变轨中,目标和平台形成一种哑铃型绳系系统,且仅依靠有限的平台推力和系绳张力来抑制系绳的摆动。针对此类输入受限的欠驱动控制问题,提出了一种利用受限张力的姿态稳定策略。首先,推导了组合体姿态动力学模型。然后通过数值求解姿态平衡方程得出理论面内姿态指令,再采用高斯伪谱法对其优化获得实际指令。最后,基于分层滑模理论设计欠驱动张力控制律,并嵌入抗饱和模块以缓解张力饱和。仿真表明空间平台能在正向有限的张力控制下,平滑地收放系绳使面内角和绳长跟踪实际姿态指令。此外,所提策略对目标体摆动和传感器误差也具有良好的鲁棒性。
空间绳系机器人; 轨道转移; 欠驱动姿态稳定; 滑模控制; 抗饱和
拖曳变轨是利用空间系绳直接将被捕获的目标体牵引至预定轨道,而无需对其进行回收的一项新兴变轨技术,在太空垃圾清理和卫星辅助变轨领域极具应用前景,因此备受关注[1-3]。在变轨时,由空间平台与目标形成的哑铃型组合体,因受平台推力的作用会发生复杂的摆动,影响飞行安全[4-6]。此外,系绳具有“半弹簧”特性会发生松弛并与目标体缠绕从而造成组合体失稳。因此如何维持系绳张紧并抑制摆动是变轨控制中的关键与难点。鉴于非合作目标无法提供控制力,组合体的姿态稳定只能依靠平台单端完成,这属于典型的欠驱动系统。
针对这类输入受限的欠驱动控制问题的求解,可分为指令设计和控制器设计两部分。姿态控制指令与平衡位置密切相关,文献[7]表明,轨道起始半径、航天器质量和绳长会影响系绳在姿态平衡位置附近的摆动特性。文献[8]进一步指出推力系数会同时影响摆动频率与平衡位置,并且摆动频率与轨道角速度接近时会引起共振。基于此,文献[9]在分析了推力系数与面内平衡角的关系后,推导了面内角指令近似解析表达式。对于控制器设计,文献[10]根据轨道与姿态间的动力学耦合,提出了只利用平台推力同时进行变轨机动与姿态稳定的最优控制。这虽然提高了效率,但却对轨道设计带来极大的限制。因此很多研究采用轨道与姿态分开控制的策略,通过收放系绳来抑制组合体的系绳摆动[9,11-13]。文献[9]采用了分层滑模理论来设计欠驱动张力控制律,以跟踪面内平衡角。为防止系绳松弛,文献[11]考虑了张力的下限约束,并用直接配点法设计了绳长加速率最优控制律。文献[12]又进一步考虑了张力的上限约束,构造了能使系绳摆动衰减的期望绳长收放速率,并以此设计了张力控制律。文献[13]基于势能成型和阻尼注入理论,提出了仅利用绳长反馈的正向有界张力控制律。以上考虑张力约束的控制策略可以在稳定姿态的同时保证张力处于合理范围内,然而却需要频繁地收放系绳,使得系绳摆角在经历长时间的调整后才能趋于稳定,这无疑对系统的可靠性提出了很大的挑战。因此,如何利用受限张力平滑快速地稳定姿态显得尤为重要。
本文针对这个难题,提出一种先优化姿态指令,再设计欠驱动张力控制律的拖曳变轨姿态稳定策略。其中,系绳实际姿态指令由平衡角解算得到的理论指令经高斯伪谱法优化得到。其次,本文在分层滑模控制的基础上加入抗饱和模块以使系统能在受限张力控制下跟踪实际指令。最后,进行仿真分析并加入一定的模型及测量误差以检验其鲁棒性。
1 拖曳变轨动力学模型推导
如图1所示,空间平台在完成目标体抓捕后,与之形成哑铃型组合体。组合体在空间中的运动可用5个自由度来表示:质心轨道半径r、真近点角α、面内角θ、面外角φ和绳长l。为简化模型的推导,现作如下4条假设:
1) 两端航天器视为质点;
2) 系绳视为质量分布均匀的刚性杆;
3) 只考虑组合体质心的共面变轨;
4) 组合体所受外力仅为地球引力与平台推力。
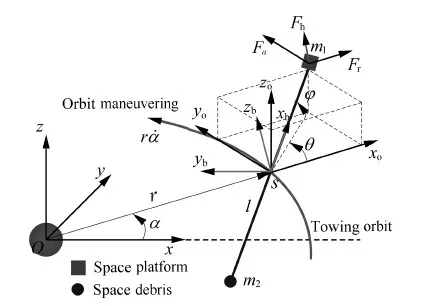
图1 坐标系及组合体受力示意图Fig.1 Illustration of frames and platform thrusts
定义Oxyz为地球惯性系,O为地球球心,xOy为轨道面,Ox轴指向近地点;Sxoyozo为组合体质心轨道系,S为组合体质心,Syo轴指向真近点角增大的方向;Sxbybzb为体坐标系,由轨道系绕Szo轴转θ再绕Syb轴转φ而得。
在变轨中,空间平台推力F可分解为沿Sxo轴的径向力Fr和沿Syo轴的横向力Fα。Fh为平台面外控制推力,平行于Szb轴,不会对面内变轨造成影响。
对于短绳系系统,由绳长引起的姿态对质心轨道的耦合影响十分微弱,因此组合体质心的轨道动力学模型可通过忽略绳长,直接由牛顿力学法得出,其结果与传统刚性航天器共面变轨轨道模型相同,本文不再赘述。
组合体动能[14]为
(1)

组合体势能为

(2)
式中:μ为地球引力常数。
(3)
式中:T为系绳张力;各质量系数Mi(i=1,2,3)定义为
Qθ、Qφ和Fm2为广义外力,定义为
(4)
式中:αr和αα分别为平台推力F所产生的组合体质心径向加速度和横向加速度。
2 姿态指令设计
在常值平台推力下,经过姿态平衡位置解算,可得出理论姿态指令。鉴于本文中的面内角的稳定与系绳的收放都由单向有界的张力来控制,对于输入有约束的欠驱动控制问题,阶跃指令会产生较大的控制力,并且会使加入抗饱和环节后的控制器参数十分难调。因此,采用高斯伪谱法对理论指令进行优化,最后得到姿态控制所需的实际指令。指令设计流程如图2所示。图中:θe为面内角理论指令;le为系绳绳长的理论指令;φe为面外角理论指令;θd为面内角实际指令;ld为绳长实际指令;φd为面外角实际指令。

图2 姿态指令设计流程图Fig.2 Flow chart of attitude command design
2.1 姿态平衡角解算

(5)
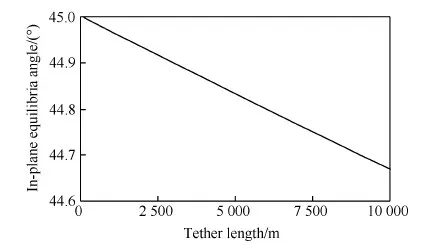
由式(5)可见,在恒定小推力下影响平衡位置的因素有轨道角速度、平台质量和绳长。在变轨高度较小的情况下,轨道角速度变化以及由燃料消耗引起的平台质量变化均可忽略,因此唯有绳长会对平衡角有较大的影响。在进行平衡角解算时,将变轨平均角速度和初始平台质量,以及姿态稳定后的理论绳长代入式(5)即可求得理论面内角指令θe。
2.2 姿态指令优化
设计“时间-控制能量”性能指标为

(6)
式中:tf为指令跟踪所需的自由末端时间;kt和ke分别为时间与能量的权重系数。

xl,θmin≤xl,θ≤xl,θmax
注1由2.1节可知,为了保持理论面内角指令,系绳的理论长度应等于初始长度,即le=l0。
控制量为系绳张力,定义张力约束为
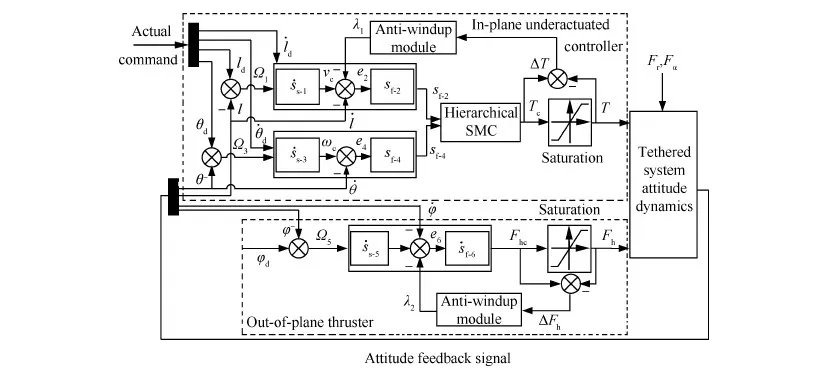
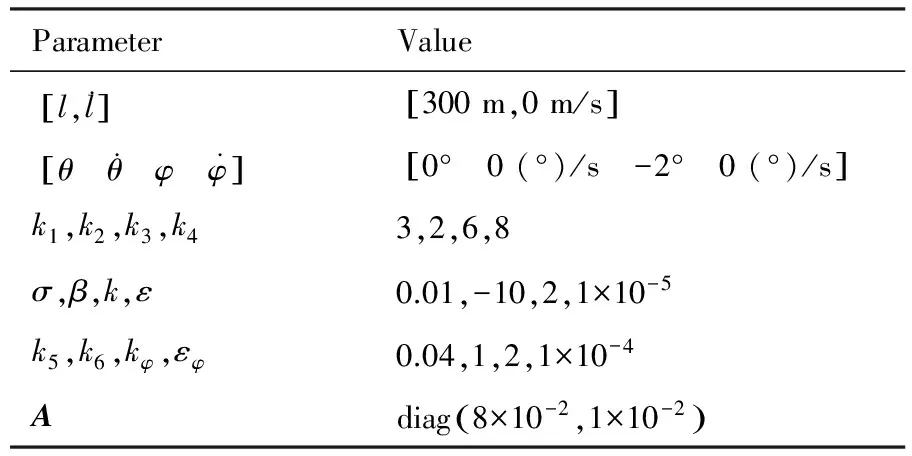
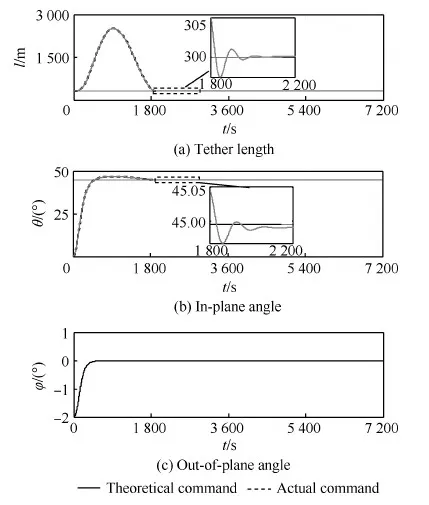
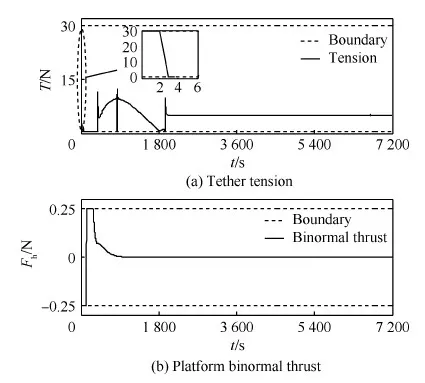
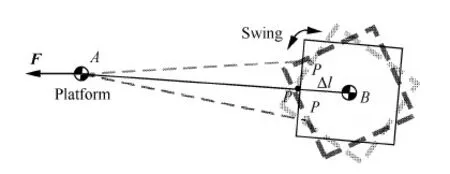
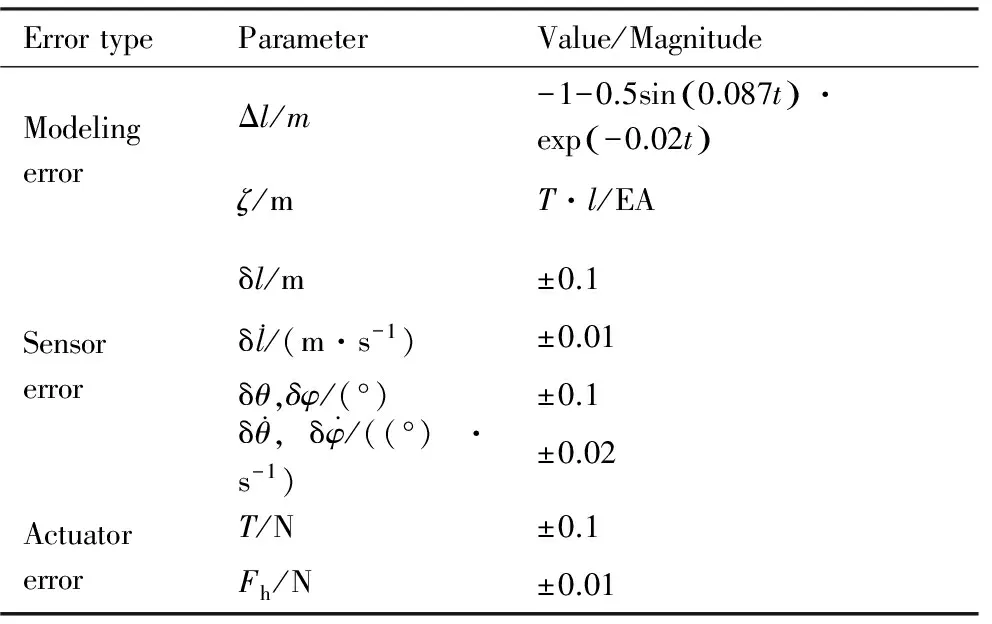
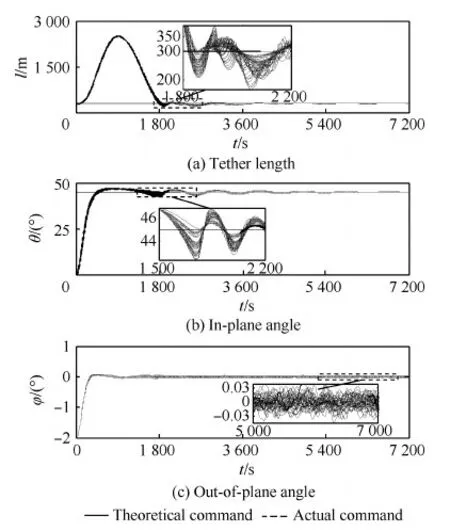
0 注2若无特殊说明,下标“max”和“min”均表示相应物理量的最大值和最小值。 由组合体姿态模型可知,系绳的面内与面外通道的动力学耦合较小,可以分别设计各自的控制器,即使用系绳张力控制面内角,而面外角的稳定则由平台侧向推力实现。由于张力并不直接作用于面内角,而是通过绳长间接地实施控制,因此针对该欠驱动系统,采用分层滑模控制算法。该算法无需复杂的坐标变换,便于在具有较强非线性的绳系系统中的应用。此外在每个控制器的设计中,引入时间尺度分离的概念,将控制系统分为快、慢两个回路,其中慢回路为快回路提供虚拟控制量。控制的目的是使组合体姿态在输入受限的控制下跟踪实际指令。图3为控制器结构图,图中:ss-i(i=1,3,5)依次为绳长、面内角和面外角的慢回路滑模面;sf-j(j=2,4,6)依次为3个姿态的快回路滑模面;Ωi=xdi-xi(i=1,3,5)为慢回路状态偏差,ej(j=2,4,6)为快回路状态偏差,其具体定义将在3.2节和3.3节中给出;vc为绳长速率虚拟控制量;ωc为面内角速率虚拟控制量;Tc为张力控制律输出量;λ1和λ2为补偿信号;ωφc为面外角虚拟控制量;Fhc为平台侧向推力控制律输出量;ΔT=Tc-T为张力饱和偏差信号;ΔFh=Fhc-Fh为推力饱和偏差信号。 (7) 图3 控制器结构Fig.3 Structure of controller 定义第1层滑模面为 (8) 式中:ki和kj为正系数。 3.1 自适应抗饱和辅助模块设计 单边约束的系绳张力和平台侧向推力都受饱和约束,当执行器长期处于饱和状态时,控制性能会大幅下降,甚至导致系统失稳[15]。因此需对控制器作抗饱和处理。自适应控制对于有输入约束的系统而言是一种可靠的方法,并且已被应用于许多航天器姿态控制中[16-19]。因此本文参考文献[19]设计自适应抗饱和辅助系统为 3.2 抗饱和分层滑模面内控制律设计 分层控制策略将绳长与面内角状态量分为两组,(x1,x2)和(x3,x4),令式(8)中i=1,3;j=2,4后即可得到它们的第1层滑模面。其中快回路状态偏差定义为e2=vc-x2-λ1和e4=ωc-x4。它们等于各自慢回路滑模面的等效控制量: 总张力包含两部分: Tc=Teq+Tsw 式中:Teq和Tsw分别为等效张力与切换张力。 A1λ1+k2e2=0 式中:satT(Teq)+ΔT=Teq,因此可得张力等效控制律为 (9) 定义第2层滑模面: s=σsf-2+βsf-4 式中:σ和β为待定权重系数。 切换控制律可由如下Lyapunov函数得出: 对其求导可得 sσb1(satT(Teq+Tsw)+ΔT)+ (10) 式中:satT(Teq+Tsw)+ΔT=Teq+Tsw,将式(9)代入式(10)并选用指数趋近律,可得 k4e4)]=-ks2-εssats(s)≤0 式中:k和ε为趋近律系数。则切换控制律为 (11) 因此,总张力即为式(9)与式(11)之和。其中饱和函数sats(s)用于滑模面消抖,其定义为 式中:Δ1=10-3;Δ2=10-4。 3.3 抗饱和平台面外角推力控制律设计 其原理和步骤与张力相似,其快回路偏差定义为:e6=ωφc-x6-λ2,ωφc可由面外角慢回路的等效控制量得出: (12) 令g2=b2,选用指数趋近律,则可得平台侧向推力滑模控制律为 (13) 式中:kφ和εφ为趋近律系数。 当理论绳长le定为300 m时,通过求解式(5)得到组合体的理论面内指令为θe=44.993°。 设指令跟踪段性能指标权重系数分别为kt=1和ke=0.5,由于平台推力为20 N,张力不应过大,否则会对平台造成较大的干扰且易导致两端的碰撞,同时系绳又应该避免松弛,故设置张力约束为:0.5 N≤T≤30 N。 假设系统在变轨前的姿态已处于稳定状态,即系绳指向地心,则可设状态初值及终值为 图4 绳长对面内平衡角的影响Fig.4 Effect of tether length on in-plane equilibrium angle 允许面内角指令存在≤5%的超调,即 设平台侧向姿态控制发动机的最大输出为250 N·m, 则推力约束为-0.25 N≤Fh≤0.25 N。 设置系统姿态初值及控制器参数如表1所示。 组合体姿态控制结果如图5和图6所示。图5 反映了系统的整体姿态控制效果,在抗饱和的平台控制力下,组合体姿态能跟踪各自实际指令并最终处于稳定状态,达到了预期的控制目标。由图5(a)可见,系绳在姿态控制中经历了一次平滑的收放,最大释放绳长约为2 500 m,并于1 900 s 左右收回到理论长度。结合图5(b)的面内角变化看,当系绳释放至最大值时,面内角也能到达其峰值,并保持一段时间,然后随着系绳的回收最终稳定在平衡位置。这充分说明面内姿态可通过收放系绳调节科氏力及重力梯度力矩来稳定。图5(c)显示了面外角能在有抗饱和的平台侧向推力控制下快速稳定到0°。 表1 姿态初值与控制器参数Table 1 Attitude initial values and controller parameters 图5 绳长、面内角及面外角响应Fig.5 Responses of tether length, in-plane angle and out-of-plane angle 图6 系绳张力及平台侧向推力Fig.6 Tether tension and platform binormal thrust 图6(a)表明,张力在姿态跟踪时偶有饱和,且起伏较大,然而一旦处于姿态保持阶段,则趋于平稳并保持在5 N左右(≈Fm2/m)。由图6(b)可见,平台面外角控制力只在控制初期有小段时间的饱和,随后在抗饱和作用下便快速下降为零,保障了面外角的镇定。 如图7所示(A为平台质心,P为抓捕点,B为目标体质心),在实际中,被捕获的非合作目标(如废弃卫星等)会存在姿态翻滚等不稳定情况,这会对拖曳造成一定的干扰。本文将这种影响等效为绳长的改变Δl,并将其与系绳弹性形变ζ一同视为建模误差。此外,执行器和传感器受其精度所限,也会存在一些偏差(定义为δ(·))。在本例中,假设目标体的平面尺寸为2 m×2 m、初始角速度为5 (°)/s,其姿态在抓捕器控制下是渐近稳定的,且不考虑与系绳缠绕的情况,令系绳刚度EA=25 997 N[20],定义各误差量如表2所示。 图7 目标体摆动对绳长的影响Fig.7 Effect of target swing on tether length 令所有执行器和传感器误差均服从正态分布。仿真50次,结果如图8所示。图8给出了考虑误差情况下的组合体姿态控制效果。从绳长及面内角的响应曲线中可以看出,在系绳释放阶段(1 000 s前),它们的指令跟踪效果良好。这是因为此时的绳长远大于目标体,尽管后者的姿态尚不稳定,但其对系绳的影响较小。然而随着系绳的回收,目标体姿态的影响在逐步增大,由于欠驱动控制的缘故,导致绳长及面内角均出现一定的振荡。但它们在张力控制下仍能稳定在各自的理论指令上,展现了良好的鲁棒性。图8(c)表明面外角能被侧向推力迅速稳定在0°附近,其由误差所引起的振荡被控制在很小的范围内,几乎不受目标体姿态扰动的影响。 表2 建模、执行器及传感器误差Table 2 Errors of modeling, actuator and sensor 图8 模型及测量误差的姿态响应Fig.8 Attitude responses with errors of modeling, actuator and sensor 1) 提出了一种利用受限张力的拖曳变轨姿态稳定策略。采取了先优化指令后设计控制器的方式,这利于欠驱动控制器在张力饱和下的应用并减少了控制能耗。 2) 带有辅助模块的张力控制器能在正向有界的约束下平滑地收放系绳,使面内角精确地跟踪实际指令。并且,姿态稳定所需的系绳收放次数和控制时间都较少,保障了系统的可靠性。此外,在考虑了目标体摆动、执行器偏差和传感器误差的情况下,该策略仍能取得较好的指令跟踪效果,体现了良好的鲁棒性。 3) 由于所用的模型未考虑目标体姿态,这限制了策略的适用范围。因此,研究如何实施目标体的接管控制防止缠绕,并同时抑制系绳的摆动,将是下一步需要解决的问题。 [1] ANDERSON K S, HAGEDOM P. Control of orbital drift of geostationary tethered satellites[J]. Journal of Guidance, Control, and Dynamics, 1994, 17(1): 10-14. [2] MOSS R. Tether-payload transfer between circular orbits[C]//Proceedings of AIAA Joint Propulsion Conference. Reston: AIAA, 1990: 1-9. [3] NO T S, COCHRAN J E. Dynamics and control of a tethered flight vehicle[J]. Journal of Guidance, Control, and Dynamics, 1995, 18(1): 66-72. [4] WANG B H, MENG Z J, HUANG P F. A towing orbit transfer method of tethered space robots[C]//Proceeding of the 2015 IEEE Conference Robotics and Biomimetics. Piscataway, NJ: IEEE Press, 2015: 964-969. [5] LIU H T, YANG L P, ZHANG Q B, et al. An investigation on tether-tugging de-orbit of defunct geostationary satellites[J]. Science China Technological Sciences, 2012, 55(7): 2019-2027. [6] SUN L, ZHAO G W, HUANG H, et al. Tether-dragging maneuver strategy and tether control method[C]//Proceedings of 2010 Asian-Pacific International Symposium on Aerospace Technology. Beijing: CSAA, 2010: 719-723. [7] ZHAO G W, SUN L, TAN S P, et al. Librational characteristics of a dumbbell modeled tethered satellite under small, continuous, constant thrust[J]. Journal of Aerospace Engineering, 2012, 227(5): 857-872. [8] 孙亮, 赵国伟, 黄海, 等. 面内轨道转移过程中的绳系系统摆振特性研究[J]. 航空学报, 2012, 33(7): 1245-1254. SUN L, ZHAO G W, HUANG H, et al. Analysis of librational and vibrational characteristics for tethered system during orbital transfer in plane[J]. Acta Aeronautica et Astronautica Sinica, 2012, 33(7): 1245-1254 (in Chinese). [9] SUN L, ZHAO G W, HUANG H. Stability and control of tethered satellite with chemical propulsion in orbital plane[J]. Nonlinear Dynamics, 2013, 74(4): 1113-1131. [10] CHO S B, MCCLAMROCH N H. Optimal orbit transfer of a spacecraft with fixed length tether[J]. The Journal of the Astronautical Sciences, 2003, 51(2): 195-204. [11] 钟睿, 徐世杰. 基于直接配点法的绳系卫星系统变轨控制[J]. 航空学报, 2010, 31(3): 572-578. ZHONG R, XU S J. Orbit transfer control for TSS using direct collocation method[J]. Acta Aeronautica et Astronautica Sinica, 2010, 31(3): 572-578 (in Chinese). [12] 刘海涛, 张青斌, 杨乐平, 等. 绳系拖曳离轨过程中的摆动抑制策略[J]. 国防科技大学学报, 2014, 36(6): 164-170. LIU H T, ZHANG Q B, YANG L P, et al. Oscillation suppression strategy during tether-tugging reorbiting[J]. Journal of National University of Defense Technology, 2014, 36(6): 164-170 (in Chinese). [13] WEN H, ZHU Z H, JIN D P, et al. Constrained tension control of a tethered space-tug system with only length measurement[J]. Acta Astronautica, 2016, 119: 110-117. [14] WILLIAMS P. Deployment/retrieval optimization for flexible tethered satellite systems[J]. Nonlinear Dynamics, 2008, 52(2): 159-179. [15] HU Q L. Robust adaptive sliding mode attitude maneuvering and vibration damping of three-axis- stabilized flexible spacecraft with actuator saturation limits[J]. Nonlinear Dynamics, 2009, 55(4): 301-321. [16] ZHU Z, XIA Y Q, FU M Y. Adaptive sliding mode control for attitude stabilization with actuator saturation[J]. IEEE Transactions on Industrial Electronics, 2011, 58(10): 4989-4906. [17] XIAO B, HU Q L, ZHANG Y M. Adaptive sliding mode fault tolerant attitude tracking control for flexible spacecraft under actuator saturation[J]. IEEE Transactions on Control System Technology, 2012, 20(6): 1605-1612. [18] 时建明, 王洁, 叶继坤, 等. 吸气式高超声速飞行器输入受限自适应反演控制[J]. 固体火箭技术, 2012, 35(5): 573-577. SHI J M, WANG J, YE J K, et al. Adaptive backstepping control for an air-breathing hypersonic vehicle with input constraints[J]. Journal of Solid Rocket Technology, 2012, 35(5): 573-577 (in Chinese). [19] 尹佳杰, 都延丽. 近空间飞行器再入段的输入受限滑模姿态控制研究[C]//第32届中国控制会议. 北京: 中国自动化学会, 2013: 1064-1069. YIN J J, DU Y L. Sliding mode attitude control with input constraints for near space vehicles in reentry phase[C]//Proceedings of the 32nd Chinese Control Conference. Beijing: Chinese Association of Automation, 2013: 1064-1069 (in Chinese). [20] HUANG P F, WANG D K, XU X D, et al. Coordinated control of tethered space robot using releasing characteristic of space tether[C]//Proceeding of the 2015 IEEE Conference on Robotics and Biomimetics. Piscataway, NJ: IEEE Press, 2015: 1542-1547. Underactuatedattitudestabilizationforspacetetheredtowingusingconstrainedtension WANGBingheng1,2,MENGZhongjie1,2,*,HUANGPanfeng1,2 1.ResearchCenterofIntelligentRobotics,SchoolofAstronautics,NorthwesternPolytechnicalUniversity,Xi’an710072,China2.NationalKeyLaboratoryofAerospaceFlightDynamics,NorthwesternPolytechnicalUniversity,Xi’an710072,China Duringspacetetheredtowing,thetargetandthespaceplatformconstituteadumbbell-liketetheredsystem,whichonlyreliesonthelimitedplatformthrustsandtethertensiontosuppressthetetherlibration.Aneffectiveattitudestabilizationstrategyusingboundedtensionisproposedforsuchanunderactuatedsystemsubjecttoinputconstraints.Thedynamicmodelgoverningtheattitudeofthesystemisestablished.Bysolvingthein-planeequilibriumequationnumerically,thetheoreticalin-planeattitudecommandsareobtained,whicharethenoptimizedusingGausspseudospectralmethod.Theactualin-planecommandsarethusyielded.Anunderactuatedtensioncontrollerisdesignedbasedonhierarchicalslidingmodetheory,andananti-windupauxiliarymoduleisembeddedtomitigatethetensionsaturation.Simulationresultsshowthatunderthepositiveandconstrainedtensioncontrol,thetethercanbedeployedandretrievedsmoothlybytheplatform,makingthein-planeangleandtetherlengthtracktheactualcommandsappreciably.Theproposedstrategyisalsorobusttothetargetswingandsensorerrors. tetheredspacerobot;orbitaltransfer;underactuatedattitudestabilization;slidingmodecontrol;anti-windup 2016-01-13;Revised2016-02-22;Accepted2016-05-08;Publishedonline2016-05-131321 URL:www.cnki.net/kcms/detail/11.1929.V.20160513.1321.002.html s:NationalNaturalScienceFoundationofChina(61005062,11272256);theFundamentalResearchFundsfortheCentralUniversities(3102014JCQ01005);SeedFoundationofInnovationandCreationforGraduateStudentsinNorthwesternPolytechnicalUniversity(Z2016050) 2016-01-13;退修日期2016-02-22;录用日期2016-05-08; < class="emphasis_bold">网络出版时间 时间:2016-05-131321 www.cnki.net/kcms/detail/11.1929.V.20160513.1321.002.html 国家自然科学基金 (61005062,11272256); 中央高校基本科研业务费专项资金 (3102014JCQ01005); 西北工业大学研究生创意创新种子基金 (Z2016050) * .Tel.:029-88460366E-mailmengzhongjie@nwpu.edu.cn 王秉亨, 孟中杰, 黄攀峰. 利用受限张力的拖曳变轨欠驱动姿态稳定策略J. 航空学报,2016,37(12):3783-3792.WANGBH,MENGZJ,HUANGPF.UnderactuatedattitudestabilizationforspacetetheredtowingusingconstrainedtensionJ.ActaAeronauticaetAstronauticaSinica,2016,37(12):3783-3792. http://hkxb.buaa.edu.cnhkxb@buaa.edu.cn 10.7527/S1000-6893.2016.0144 V448.22 A 1000-6893(2016)12-3783-10 王秉亨男, 硕士研究生。主要研究方向: 空间绳系机器人拖曳变轨控制。Tel.: 029-88460366E-mail: bingheng_wang@mail.nwpu.edu.cn 孟中杰男, 博士, 副教授。主要研究方向: 空间绳系机器人控制, 非线性控制。Tel.: 029-88460366E-mail: mengzhongjie@nwpu.edu.cn 黄攀峰男, 博士, 教授。主要研究方向: 空间机器人学, 遥操作, 导航、 制导与控制。Tel.: 029-88460366E-mail: pfhuang@nwpu.edu.cn *Correspondingauthor.Tel.:029-88460366E-mailmengzhongjie@nwpu.edu.cn3 姿态闭环控制律设计




4 仿真结果


5 结 论