可靠性设计分析在联机检修领域中的重大突破
2016-11-17丁定浩
丁定浩
可靠性设计分析在联机检修领域中的重大突破
丁定浩
在具备联机检修的条件下,冗余设计对系统可靠性的提高具有重大的作用。但当前在实际设计上,由于受限于设计的解析模型,因此,只能对双机并联结构和N取N-1表决冗余结构进行联机检修设计,从而抑制了联机检修设计在提升任务可靠性方面的重大潜力。开发了精度满足工程设计要求的新型数值设计软件,在联机检修设计领域获得了重大的突破。
停机检修;定期检修;联机检修;解析模型;数值设计软件
0 引言
随着军用装备战术性能的快速提升,装备变得越来越复杂,从而使系统的任务可靠性面临着重大的挑战。系统的冗余设计是大幅度地提升任务可靠度的决定性手段。但当基础模块的可靠性过低时,停机检修的冗余设计则会要求配置过多的冗余单元,考虑到场地和经费的限制,此时此种设计是不合理的。实际上,对于有人值守的场合,联机检修的冗余设计更为合理,它是充分地发挥从而大幅度地提升冗余设计的潜力的唯一选择[1-3]。
目前,只有双机并联结构和N取N-1的表决结构才能进行联机检修的设计分析,对于多于双机并联结构和任意N取K的表决结构,由于缺少显式的解析模型,因此无法对其进行联机检修的设计分析。
原因和详细的内容,详见本文附录。
1 联机检修设计的重大突破
由附录提供的分析可知,要获取多重单元联机检修的冗余设计的解析模型是比较困难的,使用能保证精度的工程设计容许的新型数值设计,是设计分析多重单元联机检修系统的唯一出路。
经过研究,其难点已经得到突破,并成功地开发了多重并联冗余的联机检修设计软件、多重旁待冗余的联机检修设计软件和多个失效单元同时联机检修的设计软件,使联机检修冗余设计进入了一个新的实用时期,使任务可靠性有了大幅度提升的可能[4]。
2 数字例
下面例举数字来示例。
首先,分析数值设计对比模型设计的误差,但此类比较只能在双机并联结构和N取N-1的表决结构中进行,因为得不到其他冗余结构的解析设计模型,从而也就无法对其进行对比。
以修复率为2/h、任务持续工作时间为10 h为例,对通过解析分析和数值分析得到的表1中的不同的并联结构和表决结构的可靠性及失效率进行比较。表1中的数据说明,通过两种方式得到的各并联和表决结构的可靠性的误差是极低的,相比失效率、修复率参数的误差完全可以忽略不计。

表1 利用解析分析和数值分析得到的各个冗余结构的可靠性的差别比较
对于不同的并联和表决结构,在不同的条件下,分别采用停机检修和联机检修的方式对其进行检修后,其可靠性如表2所示。
从表2可以看出,冗余设计通过联机检修后,其效能能够得到充分的发挥,其失效率比通过停机检修后的失效率下降了1/46~1/48。
在不同的条件下,3类联机检修的可靠性如表3所示,从表3可以看出在相同的条件下,3类联机检修中,并联联机检修的可靠性比其他两类的要低,旁待联机检修的可靠性与同时联机检修的可靠性则因条件的不同而各有高低,当冗余单元的数量较多时,同时联机检修的可靠性高于旁待联机检修的可靠性;反之,旁待联机检修的可靠性高于同时联机检修的可靠性。

表2 停机检修和联机检修后各个冗余结构的可靠性

表3 不同的条件下的3类联机检修的可靠性
3 建立在备件保障基础之上的实际修复率
传统的修复率仅考虑了故障的修复时间,即仅计及故障检修、故障隔离、折装更换和参数校正的时间。这适用于更换对象为元器件的年代,因为当时现场通常备有大量的备件,而当前现场更换单元均为由大量的元器件组成的复杂模块,不可能随意地配置,因而传统的修复率已不再适用。对此,笔者导出了实际的修复率μs与传统的修复率μ之间的关系,即[5]:

式 (1)中:P(m,nλ,t)——备件数为m、失效率为nλ、备件补充周期为t的备件保障概率。

式 (2)中:tp——现场缺少备件的条件下,等待备件到来的时间。
4 结束语
联机检修数值设计分析软件的成功开发,为大幅度地提升系统的任务可靠性开辟了广阔的空间,为了普及其应用,我们将竭力地进行义务服务。
[1]丁定浩.联机检修的冗余结构使用可用度模型修正 [J].电子产品可靠性与环境试验,2012,30(5):1-5.
[2]丁定浩.故障检修方式对装备现场更换备件配置的影响[J].电子产品可靠性与环境试验,2015,33(5):1-5.
[3]丁定浩.可靠性与维修性工程 [M].北京:电子工业出版社,1986.
[4]丁定浩.全寿命周期任务可靠度得到持续保持的新系列设计模型 [C]//第四届国防科技工业试验与测试技术发展战略高层论坛文集,2012.
[5]丁定浩,陆军.装备寿命周期使用保障的理论模型和设计技术 [M].北京:电子工业出版社,2011.
附录:失效率和修复率为常数的联机检修可靠度解析模型的导出过程
以两单元并联联机检修为例,首先列出它出现各状态之间的相互关系的状态方程。

式 (3)中:si(t+Δt)——第i状态在时刻t+Δt的事件;
si(t)——第i状态在时刻t的事件;
s0——初始工作状态,即两个单元同时处于工作状态;
s1——两个单元中已有一个单元发生失效而处于检修状态,而另一个单元仍在工作;
s2——两个单元均处于失效状态,这说明系统已经失效,一次工作过程已经结束,状态不再转移;
gij——t时刻经历Δt时间间隔因发生故障而由i状态转移到j状态的事件;
hij——t时刻经历Δt时间间隔因故障修复而由i状态转移到j状态的事件;
A∪B——A、B事件之和,即或者出
现A事件或者出现B事件;
A∩B——A、B事件同时出现的事件。
由此可见,状态事件方程的第一式表示在t时刻经历Δt时间间隔后仍处于两单元正常工作状态。它是由t时刻两种可能状态之一转移得到的,即:1)两个单元正常工作,经历Δt时间间隔不发生转移,也就是两个单元均未发生故障;2)在t时刻已有一个单元发生故障,而经历Δt时间间隔故障单元被修复而重新恢复两单元同时工作的状态。
状态事件方程的第二式表示在t时刻经历Δt时间间隔后一个单元处于工作状态,而另一单元处于故障检修状态。它也是由t时刻两种可能状态之一转移得到的,即:1)t时刻处于s0态,在经历Δt时间间隔内一个工作单元发生了故障所致;2)t时刻处于s0态,在经历Δt时间间隔后,处于工作状态的单元没有发生故障,而处于检修状态的故障单元也没有被修复,因而停留在原状态而未发生转移。
状态事件方程的第三式表示在t时刻经历Δt时间间隔后两单元均处于故障状态,这只有一种可能,就是在t时刻系统两个单元均已发生故障,系统处于失效状态。在此情况下失效单元的修复时间已与任务可靠度无关,但与战备完好率直接关联。
上列状态方程说明,联机检修的任务可靠度,就是s0(t)和s1(t)两种状态的概率之和。为了减少工作量,可以只求s2(t)失效状态的概率,拿1减去s2(t)的概率,即可得到联机检修条件下系统的任务可靠度。
为此,对上述各种状态求取它们的概率,由此状态方程就转变为概率方程:

在上列概率方程中,g00、g11和g22等不发生转移状态的概率均用相应的转移状态的概率来表达,即Pr{g11}=1-Pr{g12}-Pr{h10},Pr{g00}=1-Pr{g01},Pr{g22}=1-Pr{g21},但状态转移概率Pr{g21}等于零,因为已经发生了失效,这一过程已经结束,因此Pr{g22}=1。
将上列各等式两边同时除以Δt,即可得到下列方程组:

当Δt→0,且失效率和修复率均为常数时,不难理解,状态转移事件gij发生的概率为失效率,而hij发生的概率为修复率,即:
由此,上列方程可以转变成微分方程组:
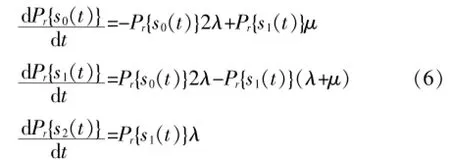
为了易以计算,对上列函数和数值进行拉普拉斯变换,由此可将微分方程组转换为代数方程组:

在最初时刻,即t=0时,Pr{s0(0)}=1,Pr{s1(0)}=Pr{s2(0)}=0,则上列方程的矩阵形式为:

上列矩阵方程的第一行是求解的目标函数,与它相乘的是等式右边3个状态概率在起始时刻的概率参数。实际上状态转移矩阵是求解系统任务可靠度的关键。掌握了直接建立这一转移矩阵的方法,就不须经过上述一系列的推导过程。
直接建立转移矩阵 [G]的方法,转移矩阵是一个方阵,首先确定它的階数,这就是系统涉及的状态数。矩阵中元素等于S加转移其他相应状态的概率,元素是转移相应状态的概率,前面加以负号,其他不可能出现的状态元素为0。
以三单元并联联机检修系统的转移矩阵为例,按上述方法可以直接建立转移矩阵为:

下面继续讨论前面两单元并联联机检修的以矩阵表示的求解方法。为此,首先要把前列的矩阵方程的两边的右端乘以转移矩阵的逆矩阵:

则有:

前面已经说过,为了简化计算,通过求系统的失效概率来求系统的任务可靠度,即:

其中,L-1Pr{s2(s)}是失效概率的拉普拉斯反变换,它等于转移矩阵的逆矩阵中第1项第3列元素,即:

式 (13)中:det[T]——转移矩阵的行列式;
上列转移矩阵的行列式为:

代数余子式为:

则系统失效概率的拉普拉斯变式为:

上列表达式无法直接进行拉普拉斯反变换,要求变换为分项分式,即要使

这就可以进行拉普拉斯反变换,得到系统的失效概率为:

不言而喻,s1和s2是s2+(3λ+μ)s+2λ2=0的两个根,它们等于:

为了求上列分项分式的系数A、B、C,由式A(s-s1)(s-s2)+Bs(s-s2)+Cs(s-s1)=2λ2中以变量s的方次数不同来确定,即前式中左边的常数等于2λ2,其他有变量s的等于零,即有下列等式成立:

于是系统失效概率的拉普拉斯变式为:

它的反变换,即系统的失效概率Fs(ts)=L-1{Pr{s2(s)}}为:

则两单元并联的联机检修系统的任务可靠度Rs(ts)为:

但是,对于多于两个并联联机检修系统,系统的任务可靠度却难以得到解析解。原因在于转移矩阵的行列式不能分解成分项分式。例如:前面已经直接建立的三单元并联的联机检修系统的转移矩阵的行列式为:

它的系统失效概率的拉普拉斯变式应为:

其中,s1、s2、s3是方程s3+6λs2+(11λ2-5λμ)s+ 6λ3-9λ2μ=0的3个根,也就是说,对于由n个单元组成的联机检修的冗余系统,就要解n次方程的n个根,这种解析解是难以得到的。
解决这一问题的方法是进行数值计算,这就要求开发相应的计算软件来实现,否则,这类可靠性设计和分析是难以进行的。
A Major Breakthrough of Reliability Design Analysis in the Field of On-line Maintenance
DING Ding-hao
Under the condition of on-line maintenance,the redundant design has a great effect on the improvement of the reliability of the system.But at present,in the actual design,restricted by the analytical model of redundant design,the on-line maintenance design only can be conducted for dual parallel structure and N taking N-1 voting redundant structure,which inhibits the great potential of the on-line maintenance design in improving the reliability of the task.A new type of numerical design software whose precision can meet the requirements of engineering design is developed,and a major breakthrough has been made in the field of on-line maintenance.
downtime maintenance;periodic maintenance;on-line maintenance;analytical model;numerical design software
TB 114.3
A
1672-5468(2016)05-0001-05
10.3969/j.issn.1672-5468.2016.05.001
2016-01-08
丁定浩 (1929-),男,江苏吴江人,中国电子科技集团公司电子科学研究院研究员,上海大学、南京航空航天大学兼职教授,长期从事系统可靠性、维修性、保障性理论和工程设计研究工作。
