临近空间高超声速目标跟踪方法研究*
2016-11-10郭相科刘昌云张雅舰
郭相科,刘昌云,张雅舰,韦 刚,王 刚
(1.北京航空航天大学,北京 100191;2.空军工程大学,陕西 西安 710051)
临近空间高超声速目标跟踪方法研究*
郭相科1,2,刘昌云2,张雅舰2,韦刚2,王刚2
(1.北京航空航天大学,北京100191;2.空军工程大学,陕西 西安710051)
临近空间高超声速目标跟踪技术研究在空天防御系统中具有重要军事意义和理论价值。本文综述了临近空间高超声速目标跟踪中的目标运动建模、目标跟踪算法等研究内容的研究进展,并对其存在的问题进行了深入分析。针对这类目标跟踪存在的问题,结合临近空间高超声速目标探测跟踪需求,指出了临近空间高超声速目标跟踪技术的研究思路,为相关研究提供了参考。
临近空间;高超声速飞行器;目标跟踪;运动模型;跟踪算法;交互式多模型
随着美军临近空间高超声速飞行器项目[1-3]的日益成熟,具有飞行跨域大、速度快、飞行高度高、气动参数变化复杂等特点的临近空间高超声速飞行器对传统防空反导系统的拦截打击能力构成了严重挑战[4-6]。在雷达检测过程中,这类目标容易出现“三跨”现象[7];在雷达跟踪过程中,这类目标具有横向机动且飞行高度较低、雷达的发现时间晚、探测跟踪时间短的特点,加之这类目标借助气动力产生机动,而跟踪模型中很难对目标的气动力准确建模,导致跟踪误差大,甚至无法跟踪[8]。这类目标机动样式的发展使目标运动状态变化规律向着非线性、高动态的方向发展,从而对防空反导系统的拦截打击能力构成了严重挑战,对未来战争的作战模式、作战过程及战争结局将产生颠覆性影响[9-10]。因此,开展临近空间高超声速目标的探测跟踪理论及关键技术研究,对保障我国空天安全、促进空天防御技术发展具有重要意义。
1 临近空间高超声速目标特性分析
1.1临近空间高超声速目标运动特性分析
临近空间高超声速机动目标的飞行马赫数在 5-25之间;巡航高度范围主要在 20km-100km 的临近空间;且其机动能力强,典型飞行轨迹为跳跃式飞行轨道,飞行参数难以测量[2-6],临空高超声速机动目标的典型运动轨迹与弹道目标和空气动力学目标的区别如图1所示。
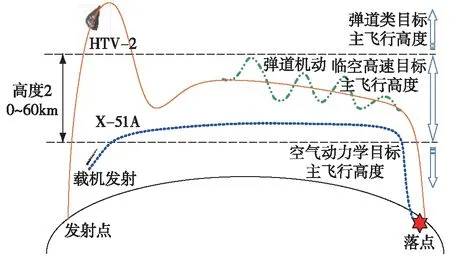
图1 临近空间高超声速机动目标与弹道目标及空气动力学目标的区别
临近空间高超声速机动目标在整个飞行过程中,其目标的运动特性具有弹道导弹和空气动力学目标的双重特性:
1)临空高超声速目标高速飞行过程中既具有弹道导弹类目标的高速特性,又不具有弹道导弹目标的轨迹可预测性。既可纵向跳跃滑翔机动,又可横向机动;
2)临空高超声速目标具有空气动力学目标的高机动特性,但其飞行高度是超出空气动力学目标的临近空间,飞行速度远超空气动力学目标,且气动参数变化复杂,机动样式灵活。
1.2临近空间高超声速目标跟踪的挑战
对临空高超声速目标的实时高精度跟踪是拦截打击目标的基础,但机动目标的精确跟踪在理论和技术上一直都是一个难题,其困难主要源于两种不确定性[11-12]:一是目标运动方式的不确定性,二是在测量过程中,由于环境的不确定性,也会造成测量值的不确定性。
1)目标运动方式的不确定性,是指被跟踪目标的运动模式、参数及其演变规律对于观测方是未知的。当建立的目标运动模型与目标真实状态不一致时,预测状态与目标真实状态失配,会造成跟踪性能的严重下降甚至失效。解决目标运动方式不确定性的主流方法是建立机动目标状态-空间模型,并利用滤波跟踪算法实现对目标的实时跟踪。临近空间高超声速目标由于其高速,且气动参数变化复杂,导致其运动样式极其复杂,很难建立符合其运动特点的运动模型。
2)解决环境的不确定性主要采用机动检测和机动辨识,从而自适应调整测量和状态误差,或自适应调整目标状态-空间模型。但目标的高超声速特点很难实时地进行机动检测和辨识。
因此,针对临近空间高超声速目标的跟踪,如何建立符合临近空间高超声速目标运动特性的目标运动模型;如何通过机动检测和机动辨识,自适应调整测量和状态误差,或自适应调整目标状态-空间模型,是实现对其稳定跟踪需要解决的两个关键问题。
2 临近空间高超声速目标跟踪研究现状
目标跟踪的研究主要涉及两个方面:目标的运动特性建模;滤波跟踪算法[11-12]。针对临近空间高超声速目标的跟踪问题,许多学者在目标运动模型、滤波跟踪算法等方面进行了深入研究,并取得了大量的研究成果。
2.1临近空间高超声速目标运动模型
目标运动模型不仅是目标跟踪的重要基础,也是从运动机理上解决目标跟踪问题的基本方法[13]。目标运动模型的分析和研究主要基于两个方面:1)近似化输入参数满足某种随机分布;2)以经过正确选择的参数描述的运动模型的组合来表示目标运动航迹。
大多数的机动目标跟踪算法都是基于目标运动模型,通过目标运动模型来描述目标状态随着时间而变化的过程。根据对目标运动特性分析和描述方法的不同,目前的机动目标运动模型从建模方法上大致可以分为四类[13-14]:统计特性建模、动力学建模、运动学特性建模和参数化函数建模。
1)统计特性建模:这种建模方法是一种通用性较强的粗糙建模方法,主要用于缺乏运动规律先验信息的目标运动建模。目前用于描述目标机动表征量的随机过程主要有白噪声、维纳过程、零均值和非零均值一阶马尔科夫过程、半马尔科夫过程,如白噪声加速度模型、维纳过程加速度模型、Singer加速度模型、一阶马尔科夫过程Jerk模型等[13]。
文献[15]在对高超声速滑翔再入飞行器跟踪中,采用一阶马尔科夫过程描述气动力参数,将过程噪声方差构造为气动参数方差和机动时间常数的函数,时变气动力参数方差采用“渐消记忆”的统计方法由气动力参数估计值序列统计获得,存在跳变的机动时间常数则作为运动模式采用交互多模型方法与运动状态一起估计,通过仿真表明了该建模方法的有效性。
2)动力学建模:动力学建模是依据目标受力分析来建立目标加速度或Jerk的物理参数模型,这种建模方法主要用于空间目标和弹道目标的运动建模。
文献[16]根据吸气式高超声速目标的动力学特性,在重力转弯模型框架中,基于超燃冲压发动机的推力产生机理以及高超声速流场的斜激波方程和普朗特梅叶方程,提出了面向跟踪的动力学混合模型,但非解析解结构难以应用于线性化方法的滤波器设计。
3)运动学特性建模:运动学特性建模方法不考虑目标运动的原因,而是直接建立状态模型描述目标的运动学规律,这种建模方法主要用于描述目标转弯运动。
文献[17-18]根据临近空间高超声速目标在巡航段跳跃飞行的特点,假设目标角速度为一阶时间相关过程,提出了一种修正的转弯模型(Modified Coordinate Turn,MCT)。文献[19]针对速滑跃式高超声机动目标的周期性滑跃式机动的特点,将目标加速度建模为具有正弦波自相关的零均值随机过程,并推导了目标的状态方程。
4)参数化函数建模:参数化函数建模是用一组特定的空间曲线逼近目标运动状态[13],常用方法有多项式、样条、微分方程和经验公式等。这种建模方法不依赖过多的目标运动先验信息,而是直接利用了目标运动状态的时空光滑性。
2.2临近空间高超声速目标滤波跟踪算法
目标的滤波跟踪算法往往与目标运动模型是紧密相关,一个好的运动模型结合适合的滤波跟踪算法,才能得到对目标精确的状态估计[11-12]。有了目标状态模型和实时状态估计算法,机动目标跟踪要解决的主要问题就是模型如何实时匹配目标运动方式。从目标运动方式匹配的角度,解决机动目标跟踪的方法主要分为单模型方法和多模型方法。
2.2.1单模型跟踪方法
单模型跟踪算法需要通过实时调整状态模型和滤波算法来实现对目标的稳定准确跟踪。目前,在量测模型完全已知的条件下,国内外对单模型跟踪算法的研究主要可归纳为三个方面:一是研究如何调整状态模型以减小模型失配程度,尽可能满足滤波算法的最优估计条件;二是研究如何调整滤波算法来实现模型失配条件下的次优稳定滤波;三是研究如何联合调整模型与滤波算法。
文献[17-18]针对传统单模型不能有效跟踪临近空间高超声速机动目标的问题,提出了一种修正的转弯模型(MCT),结合扩展卡尔曼滤波,研究了临近空间高超声速机动目标巡航段跳跃飞行的跟踪,通过仿真表明了算法的有效性,但针对目标不同阶段的不同运动特性,文献没有给出进一步的研究。文献[20]等提出了一种基于不敏卡尔曼滤波的改进“当前”统计模型自适应滤波算法用于此类目标的跟踪,理论上取得了良好的跟踪效果,但该算法没有给出算法中比例常数C的确定方法。文献[21]等针对具有跳跃式机动的“助推+滑翔”临近空间目标,建立其特定的目标运动模型,并采用特定目标模型的Kalman 滤波算法实现对高机动目标的状态估计,但该方法没有针对其他机动样式的有效性进一步研究。文献[22]从自适应的调节卡尔曼滤波增益的角度提出了一种基于改进 Jerk模型的强跟踪滤波器的高机动目标跟踪算法,通过仿真验证算法的有效性,但跟踪算法中需要考虑机动频率的选取、遗忘因子的选取。
2.2.2多模型跟踪方法
由于目标机动样式的复杂性,单模型不可能匹配所有的目标机动样式,因此难以进一步提高跟踪精度。交互多模型方法为解决机动目标提供了新的思路,其基本思想是预设多个模型及匹配滤波器来覆盖目标可能的运动模式,通过计算每个模型的后验概率,对各滤波器状态估计值进行概率加权得到目标状态的融合估计[23]。
基本的交互多模型采用预设好的目标模型集,当预设的模型集与目标的实际机动状态一致时,将获得较好的跟踪性能;为保证对目标运动状态的完全覆盖,预设的模型集将会很庞大,而预设模型的增加集必将带来计算量的增加。变结构多模型(VSMM.Variable Structure Multiple-Model)方法通过预设大模型集,通过对测量值、先验信息和后验信息的综合利用,从大模型集中选取与目标运动特性相匹配的小模型集,从而使模型集自适应于目标的运动模式[23-25]。针对临近空间高超声速机动目标的跟踪,很多研究者采用交互多模型方法,取得了较好的跟踪效果。
文献[26]等从跟踪传感器及跟踪算法两个方面,提出多模型方法是跟踪临近空间高超声速机动目标的可行方法。在前文研究的基础上,研究了交互多模型(IMM)算法对其进行跟踪的可行性[27]。文献[28]等考虑目标加速度均值和方差随目标机动变化,引入参考加速度和CV模型的交互多模型算法,来实现临近空间高超声速目标的跟踪问题,但该方法需要使用目标机动的先验信息。文献[29]在ADE-IMM算法的基础上,提出了转移概率自适应ADE-IMM算法,仿真表明了算法的有效性,但算法中状态转移概率初始值的设置影响算法的性能。文献[18,30-31]等提出了一种基于 SCT-IMM 的多模型跟踪方法,并进一步提出了基于有向图的变结构多模型(DG-VSMM)跟踪算法,对临近空间高超声速飞行器进行跟踪,但需要针对临空高超声速目标的特点,设计更有针对性的跟踪算法。文献[15]采用“渐消记忆”法估计高超声速飞行器的时变动力学参数,采用交互多模型方法,实现了目标的运动状态和气动参数的一起估计,但模型交互复杂,计算量大。文献[32]采用多站跟踪方法对临空高超声速目标进行跟踪,并通过仿真表明基于多站的交互式多模型-无迹卡尔曼滤波算法的有效性,但计算量较大,在维数大于3时需要考虑新的滤波算法。文献[33]中提出了一种自适应网格交互多模型跟踪算法用于临近空间高超声速机动目标的跟踪,所提方法相比于固定结构交互式多模型算法极大减少了计算量。文献[34]提出了基于修正转弯模型的交互多模型跟踪算法,该算法修正了传统转弯模型,利用“当前”统计模型思想对目标角速度进行实时估计,仿真表明了算法的有效性,但针对临近开机高超声速飞行器不同阶段的运动特性,该算法没有考虑如何调整模型参数和模型数量。文献[35]针对临近空间目标飞行速度快、机动特性强和加速度突变的特性,提出一种地心直角(ECEF)坐标系下基于目标特性分析的修正强跟踪滤波(MSTF)算法,仿真结果表明该算法具有较高的定位跟踪精度,该算法重点是对目标的滑跃式机动特性进行跟踪,针对目标的其他机动特性需要进一步研究。文献[36]在文献[19]的基础上,针对目标的滑跃式机动,提出采用基于CV-CA正弦波模型的交互多模型算法进行跟踪,仿真结果表明算法对临近空间高超声速滑跃式机动目标具有较好的跟踪效果,但没有探讨对其他机动跟踪的有效性。
在天基红外传感器对这类目标跟踪方面,文献[37]提出了将基于Sigma点卡尔曼滤波的交互式多模型(SPKF-IMM)算法用于天基低轨红外卫星对临近空间高超声速飞行器的跟踪,仿真表明了算法的有效性。文献[38]等提出了一种基于约束总体最小二乘与自适应交互式多模型滤波相结合的实时跟踪滤波算法实现对目标飞行器进行实时跟踪,但没有给出多颗星如何部署及协同交互。
2.3临近空间高超声速目标跟踪问题分析
综合以上分析可知,对这类目标的跟踪研究目前还存在以下几个方面的问题。
1)目标运动特性建模方面,目前的研究主要是针对特定目标特定运动方式的运动建模,缺少符合临近空间高超声速目标典型运动特性的目标运动模型。由于临近空间高超声速目标运动方式的不确定性,很难有效建立适应各种运动方式的目标模型。
2)在目标的自适应跟踪算法方面,主要分为单模型和多模型两类典型的自适应跟踪算法。单模型跟踪算法虽然可以通过调整模型和滤波算法实现稳定跟踪,但由于目标机动样式的复杂性,单模型不可能匹配所有的目标机动样式,因此难以进一步提高跟踪精度。多模型跟踪算法研究的主要是各种模型集的设计和模型集的自适应调整,实现临空高超声速目标的精确跟踪。但由于这类目标运动方式的复杂性,很难设计一个覆盖各种运动方式的模型集;不同时刻,目标运动方式的覆盖和实时自适应匹配也是一直没有有效解决的难题。
3)目前目标跟踪过程的研究,只注重了雷达、光学等单传感器的跟踪研究。由于临近空间高超声速目标的大范围持续机动的特性,单平台/传感器只能形成较短时间的目标观测,无法实现目标全程飞行的连续观测。多平台/多传感器协同跟踪是完成临近空间高超声速目标全程跟踪的必然选择,但多传感器的协同信息处理又是一个难题。
4)目前临近空间高超声速目标跟踪过程中将目标视为点目标来处理,仅仅利用传感器获取的目标运动学参数(如位置、速度、加速度等)进行跟踪处理,忽视了对传感器获取的其他特征信息的利用,如目标幅度特征、目标频率特征、目标极化特征、目标距离像特征及目标其他特征信息[39],而由于临近空间高超声速目标的机动特殊性,仅利用目标运动学参数无法实现这类目标的稳定跟踪。
3 临近空间高超声速目标跟踪研究思考
通过临近空间高超声速目标跟踪的研究现状及存在的问题分析可知,针对临近空间高超声速目标的跟踪,可以考虑以下几个研究思路。
1)在目标的运动建模方面,由于临近空间高超声速目标运动的特殊性,需要结合临近空间高超声速目标的运动特点,结合目标特性方面的研究成果,充分利用目标的先验信息,从目标的动力学特性和运动学特性等方面,对目标的运动学特性进行准确建模。
2)在目标的自适应跟踪算法方面,在继续研究单模型自适应跟踪算法的基础上,需要重点关注交互多模型跟踪算法的研究,如何将复杂模型集(如由粗糙模型和精确模型构成的混合模型集)与多模型算法有机结合,通过模型集的自适应调整,以最少的模型实现对目标多样且时变的运动模式的覆盖和实时准确匹配。
3)通过空天地多传感器协同跟踪可以充分利用各类传感器获取的信息,扩展了时间空间感知范围,提高系统的生存能力、降低信息模糊度、改进目标的跟踪性能[11-12]。但需要针对临近空间高超声速目标的特点,充分利用各类传感器获取的特性信息进行协同信息处理。随着导弹拦截、机动目标跟踪等需求推动以及传感器技术本身的发展,利用目标特征信息辅助跟踪(feature aided tracking,FAT)的方法越来越受到关注[39-43]。因此,针对临近空间高超声速机动目标,可以考虑充分利用多传感器获取的运动信息和各类特征信息及目标的先验运动模式等信息,通过辅助特征信息实现目标的精确跟踪。
4)目前,大部分的多传感器信息系统或处理方法均是将传感器信息获取与融合处理采用分离序贯结构,鲜有有效的方法将融合结果用于复杂动态异构多传感器平台的联合优化[44-46]。针对临近空间高超声速目标的跟踪,分离序贯式结构将无法满足对其跟踪的需求,需要以提高融合跟踪精度为目标,进行信息获取与融合的联合优化,实现目标的精确跟踪。
4 结束语
综上所述,尽管目前临近空间高超声速机动目标的威胁已经得到了较为广泛的关注,但针对临近空间高超声速机动目标的跟踪技术研究目前还在起步阶段。本文综述了临近空间高超声速目标跟踪技术的研究现状,指出了目前研究存在的问题,结合临近空间高超声速目标的运动特点,给出了临近空间高超声速目标可能的研究思路,为相关研究提供了参考。
[1]黄伟,罗世彬,王振国.临近空间高超声速飞行器关键技术及展望[J].宇航学报,2010,31(5):1259-1265.
[2]李淑艳,任利霞,宋秋贵,等.临近空间高超音速武器防御综述[J].现代雷达,2014,36(6):13-18.
[3]聂万胜,罗世彬,丰松江,等.近空间飞行器关键技术及其发展趋势分析[J].国防科技大学学报,2012,34(2): 107-113.
[4]胡正东,曹渊,张士峰,等.高超声速跳跃式飞行器弹道特性分析与优化设计[J].宇航学报,2008,29(3):821-825.
[5]陈小庆,侯中喜,刘建霞.高超声速滑翔飞行器弹道特性分析[J].导弹与航天运载技术,2011(2):5-9.
[6]汪连栋,曾勇虎,高磊,等.临近空间高超声速目标雷达探测技术现状与趋势[J].信号处理,2014,30(1):72-85.
[7]骆成,李军,何子述,等.高速运动平台MIMO雷达“三跨”补偿研究[J].电子科技大学学报,2014,43(1):36-41.
[8] 雍恩米,钱炜祺,何开锋.基于雷达跟踪仿真的滑翔式再入弹道突防性能分析[J].宇航学报,2012,33(10):1370:1376.
[9]金欣,梁维泰,王俊,等.反临近空间目标作战的若干问题思考[J].现代防御技术,2013,41(6): 1-7.
[10]戴静,程建,郭锐.临近空间高超声速武器防御及关键技术研究[J].装备指挥技术学院学报,2010,21(3):58-61.
[11]周宏仁,敬忠良,王陪德.机动目标跟踪[M].北京:国防工业出版社,1994.
[12]韩崇昭,朱洪艳,段战胜,等.多源信息融合(第2版)[M].北京: 清华大学出版社,2010,1-14.
[13]Li X.R.,Jilkov V.P.Survey of maneuvering target tracking.Part I: Dynamic models[J].IEEE Transactions on Aerospace and Electronic Systems,2003,39(4): 1333-1363.
[14]Li X.R.,Jilkov V.P..Survey of maneuvring target tracking.Part II: Motion models of ballistic and space targets[J].IEEE Transactions on Aerospace and Electronic Systems,2010,46(1): 96-119.
[15]吴楠,陈磊.高超声速滑翔再入飞行器弹道估计的自适应卡尔曼滤波[J].航空学报,2013,34(8):1960-1971.
[16]李海宁,雷虎民,翟岱亮,等.面向跟踪的吸气式高超声速飞行器动力学建模[J].航空学报,2014,35(6):1651-1664.
[17]肖松,谭贤四,李志淮,等.临近空间高超声速机动目标MCT跟踪模型[J].弹箭与制导学报,2013,33(1):185-194.
[18]肖松,谭贤四,李志淮,等.基于SCT-IMM的临近空间高超声速机动目标跟踪模型[J].现代雷达,2013,35(4):15-19.
[19]王国宏,李俊杰,张翔宇,等.临近空间高超声速滑跃式机动目标的跟踪模型[J].航空学报,2015,36(7): 2400-2410.
[20]李昌玺,毕红葵,王红,等.一种临近空间高超声速目标跟踪算法[J].航天电子对抗,2012,28(4):10-13.
[21]曹亚杰,李月娟.基于高速高加速临近空间目标状态预估算法[J].现代防御技术,2013,41(6):97-101.
[22]樊友友.高速高机动目标跟踪算法及应用研究[D].西安:西安电子科技大学,2013.
[23]H.A.P.Blom,Y.Bar-Shalom.The interacting multiple model algorithm fo systems with markovian switching coefficients[J].IEEE Trans.on Automatic Control,1988,33,pp:780-783.
[24]R.H.Bishop,A.C.Antoulas.Nonlinear approach to the aircraft tracking problem[J].AIAA Journal of Guidance,Control and Dynamics,1994,17(5):1124-1130.
[25]X.R Li,Y.Bar-Shalom.Multiple-model estimation with variable structure—Part I[J].IEEE Trans.on Automatic Control,1996,41(4): 478-493.
[26]关欣,赵静,何友.临近空间高超声速飞行器跟踪技术[J].四川兵工学报,2011,32(8): 4-6.
[27]关欣,赵静,张政超,等.一种可行的高超声速飞行器跟踪算法[J].电讯技术,2011,51(8): 80-84.
[28]董来欣,谭贤四,武子彦,等.一种新的高超声速目标跟踪算法[J].空军雷达学院学报,2012,26(2):111-114.
[29]李昌玺,毕红葵,张兵,等.转移概率自适应高超声速目标跟踪算法[J].现代雷达,2013,35(11):84-91.
[30]肖松,李志淮,谭贤四,等.临近空间高超声速飞行器DG-VSMM跟踪算法[J].弹道学报,2013,25(2):22-27.
[31]肖松,谭贤四,王 红,等.变结构多模型临近空间高超声速飞行器跟踪算法[J].红外与激光工程,2014,43(7):2362-2370.
[32]秦雷,李君龙.基于多站交互式多模型算法跟踪临近空间目标[J].系统仿真学报,2014,26(10):2486-2496.
[33]秦雷,李君龙,周荻.基于AGIMM的临近空间机动目标跟踪滤波算法[J].系统工程与电子技术,2015,37(5):1009-1014.
[34]苗伟,李昌玺,吴聪.基于修正转弯模型的交互多模型跟踪算法[J].现代防御技术,2015,43(3):113-118.
[35]张翔宇,王国宏,李俊杰,等.临近空间高超声速滑跃式轨迹目标跟踪技术[J].航空学报,2015,36(6):1983-1994.[36]李俊杰,王国宏,张翔宇,等.临近空间高超声速滑跃式机动目标跟踪的IMM算法[J].电光与控制,2015,22(9):15-19.
[37]周军,董鹏,卢晓东.基于Sigma点卡尔曼滤波的天基红外低轨卫星目标跟踪[J].红外与激光工程,2012,41(8):2206-2210.
[38]李罗钢,荆武兴,高长生.基于预警卫星系统的临近空间飞行器跟踪[J].航空学报,2014,35(1):105-115.
[39]Singer P F,Coursey A L.Feature aided tracking (FAT)[C].In: Proceedings of SPIE Conference on Signal and Data Processing of Small Targets,Orlando,2004,249-259.
[40]占荣辉,张军.特征辅助数据关联研究综述[J].系统工程与电子技术,2011,33(1):35-41.
[41]祝依龙,范红旗,卢再奇,等.基于特征的雷达目标机动检测算法综述[J].系统工程与电子技术,2011,33(9):1913-1920.
[42]祝依龙,范红旗,付强,等.雷达目标特征信号与运动模式的相关性研究[J].中国科学:信息科学,2012(42): 907-922.
[43]张凯,单甘霖,吉兵,等.基于姿态角辅助非线性滤波算法的机动目标跟踪[J].电子学报,2012,40(8):1670-1675.
[44]潘泉,王增福,梁彦,等.信息融合理论的基本方法与进展(Ⅱ)[J].控制理论与应用,2012,29(10):1233-1244.
[45]赵宗贵,王国强,刁联旺.战场感知资源管理与信息融合[J].指挥信息系统与技术,2012,3(1):12-19.
[46]KOLBA M P,SCOTT W R,COLLINS L M.A framework for information-based sensor management for the detection of static targets [J].IEEE Transactions on Systems,Man,and Cybernetics,PartA: Systems and Humans,2011,41(1):105-120.
Tracking Algorithms for Near Space Hypersonic Target
GUO Xiang-ke1,2,LIU Chang-yun2,ZHANG Ya-jian2,WEI Gang2,WANG Gang2
(1.Beijing University of Aeronautics and Astronautics,Beijing 100191;2.Air Force Engineering University,Xi’an 710051,China)
The tracking technique of the Near Space Hypersonic Target (NSHT)has great military significance and theoretical value in the air and aerospace defense system.The research about target motion modeling,the adaptive tracking algorithms for NSHT based on single model and the multiple-model is summarized in this paper.The potential idea to deal with the problem of tracking in NSHT is proposed,meeting the demand of target detection tracking requirements.The research provided a reference for the interrelated study.
near space; hypersonic vehicles; target tracking; moving model; tracking algorithms; interacting multiple model
1673-3819(2016)05-0008-05
2016-06-19
2016-07-12
国家自然科学青年基金(61503408)
郭相科(1980-),男,河南泌阳人,硕士,讲师,研究方向为机动目标跟踪。
刘昌云(1973-),男,博士,副教授。
张雅舰(1980-),男,讲师。
韦刚(1978-),男,讲师。
王刚(1975-),男,博士,教授。
E917
ADOI:10.3969/j.issn.1673-3819.2016.05.002