汽车打包机机构运动与车身变形仿真研究
2016-10-21杨二枫章泳健戴国洪乐云辉
杨二枫,章泳健,戴国洪,乐云辉
(1.常熟理工学院机械工程学院,江苏常熟215500;2.江苏省机电产品循环利用技术重点建设实验室,江苏常熟215500)
汽车打包机机构运动与车身变形仿真研究
杨二枫1,2,章泳健1,2,戴国洪1,2,乐云辉1
(1.常熟理工学院机械工程学院,江苏常熟215500;2.江苏省机电产品循环利用技术重点建设实验室,江苏常熟215500)
针对报废汽车拆解线工作过程仿真中,汽车打包机所涉及的机构运动及被打包车身不规则变形的联合仿真要求,分析了汽车打包机工作机构的特点和车身变形仿真的难点,提出了解决仿真难点的两个方案.通过比较,确定了运用3DS Max软件完成仿真.在3DS Max中利用“变形器”实现了车身的变形仿真,并运用正、反向运动学原理完成了机构运动的仿真,实现了汽车打包机机构运动与车身变形的联合仿真.
汽车打包机;3DS Max;变形器;正反向运动学
如果报废汽车不能得到有效处理,不仅浪费大量可循环利用的资源,也会造成严重的环境问题.在各种对报废汽车进行拆解处理的方案中,目前最新的是通过组建报废汽车拆解处理线对汽车进行批量化、专业化的作业处理,其一般要经过预处理、流水线拆解和后处理等环节.处理完成后,不仅能获得各类可供直接回收利用的金属、非金属材料,更可获得可进行再制造或再利用的汽车零部件.为了更好地介绍及推广这种新工艺,需要对报废汽车拆解处理线的整个工作过程进行仿真,以向用户呈现一个动态的可视化的工艺过程.
在对报废汽车拆解处理线进行仿真的过程中,涉及两类仿真:一类是运动仿真,一类是变形仿真.同时,仿真过程中,还需要解决运动时序的控制问题,即各个运动的相互连贯和运动与变形的联合仿真.对于拆解处理线后处理过程中的汽车打包机而言,由于其在工作过程中存在相关机构的机构运动,同时存在被打包车身的压缩变形,也要通过时序控制保证各个运动之间的协同关系,本文以该典型工位的工作过程仿真为例,介绍了报废汽车拆解处理工艺的仿真工作.
1 汽车打包机工作原理
汽车打包机是用来对废旧车身进行打包的专用机械,其工作过程大致分为如下几个步骤:①放入车身,活动挡板动作,将出口封闭;②门盖下压,并到达最终位置,使车身发生竖直方向变形;③左、右压头从两侧挤压,使车身发生横向变形;④推头动作,使车身发生一定量的纵向变形;⑤打开挡板,推头将打包过的车身推出.汽车打包机整体结构及各部分名称如图1所示.
在对报废汽车的后处理过程中,汽车打包机扮演着重要的角色,通过对流水线拆解处理后的剩余车身打包,不仅节省存放空间、便于运输,也可再对打包后的车身进行剪切,做进一步的处理.在其工作过程中涉及挡板、压头、推头、门盖等的机构运动,以及置于其中的车身的变形.为了介绍及动态展示汽车打包机的工作过程,本文将研究对其工作过程的仿真.

图1 汽车打包机
2 仿真技术分析及仿真方案研究
在汽车打包机工作过程中,机构运动的原理较为简单,是常见的滑动及转动,但由于机构中的构件比较多,存在多个转动和滑动连接,因此,整体的机构运动就较为复杂.车身的变形为不规则变形,车身在变形的同时自身也存在相关的机构运动.而且在打包机整个工作过程中,整体的机构运动与车身变形存在同步进行、交叉进行的状况,因此在仿真的过程中必须实现对机构运动与变形运动的仿真,同时还必须完成对两种运动的合成运动的仿真,即完成二者的联合仿真,才能真实地展现出打包机的工作过程.
对于机构运动,应用ADAMS等运动动力学分析软件或集成型CAD/CAM软件中的运动仿真模块均能完成此部分的仿真,而对于不规则变形,由于此类软件运动仿真中均视构件为刚体,故无法实现变形.使用ANSYS等有限元分析类软件能进行大变形的计算与仿真,但不仅操作较复杂,而且有限元类软件无法完成机构运动的仿真.
由于本仿真研究的目的是实现机构运动与变形的联合仿真,上述仿真方法各有其某方面的优点,考虑到软件之间耦合和通用性的问题,整体仿真应尽量在同一款软件中完成.故如何实现物体的不规则变形,如何将机构运动与不规则变形进行联合仿真,将是本文的研究重点及难点,为此,制定了如下两套方案,并分析其优劣.
2.1基于物理方法的仿真
基于物理方法的仿真,即基于力与运动及变形之间物理关系的仿真.
基于多刚体动力学分析技术的运动仿真软件通过构件与运动副的定义将整个机构定义为一个运动链,然后结合运动及受力的定义,可组成一个微分或积分方程组(视分析类型的不同),并通过通用数值计算方法进行求解.虽然内部的计算过程非常复杂,但用户只需要完成机构及运动的定义即可,所以用来进行机构运动的仿真很方便,进行动力学分析不仅可以获得力的数据,而且可以模拟接触及碰撞,但由于构件存在刚体假设,所以不能产生变形效果.
结合有限元分析技术的柔体动力学可以分析构件的变形,但由于其变形求解是基于线性理论框架下的模态叠加法,所以其变形效果也仅适用于弹性变形范围.此类方法如Siemens NX软件中的Motionsimulation模块、ADAMS等,对于本文中所涉及的车身在打包过程中的大变形情况是不适用的.
通用动画类软件中,也有采用动力学仿真技术的应用模块,如3DS Max软件中有一个MassFX动力学模块,可以定义物体为柔体,使物体产生变形的效果.使用MassFX模块无法实现机构运动的仿真,也就无法实现机构运动与变形的联合仿真.
2.2基于几何方法的仿真
基于几何方法的仿真,即不涉及力与运动及变形之间物理关系,而仅从几何的角度出发进行运动与变形的仿真.
一些三维设计软件具有动画功能,除了可以较容易实现机构运动的定义与仿真,而且具备模型随尺寸参数化修改实现变形动画的功能.如SolidWorks软件中,可以实现一个物体随某个或某些尺寸在一定范围内变化的变形,但车身模型的复杂变形无法通过尺寸参数的修改来实现,所以该功能不适用于本文的车身不规则变形.
通用动画类软件中,如在3DS Max软件中,实现物体的变形非常简单,其中一种方法是通过添加关键帧实现物体的参数化变形.但为了实现不规则变形,可以使用的方法是给其添加“变形器”修改器,然后通过添加关键帧的方式实现任意可控的变形[1].
在3DS Max软件中,对于机构运动,可以通过给机构中各个构件添加关键帧的方式使其具有机构运动的整体效果,但在打包机机构的运动中包含着多个转动、滑动,通过添加关键帧方式完成仿真不仅麻烦而且不能完成精确的机构仿真.在此软件中还有一个“骨骼系统”[1]模块,其原理是正、反向运动学,即通过建立一定的父子关系,组成正、反向运动关系链,实现物体间的约束关系.而且通过添加骨骼系统模块完成的动画也是借助于添加关键帧,因此就可以通过“关键帧”这一共同点将机构运动与车身变形联系起来,以完成二者的联合仿真.
综上所述,本文将采用3DS Max软件中的“变形器”修改器和“骨骼系统”模块来完成汽车打包机工作过程的仿真.
3 仿真的实现
3.13DS Max动画制作原理与方法
在3DS Max软件中,对于机构的动画制作一般应用关键帧动画制作方法,并结合各种控制器进行效果控制.其中主要有三种思想:其一是采用各个模型分别制作动画,然后再进行组合,结合到一个场景中,达到模拟现实的效果;其二是应用正向运动学的方法,建立父子关系,完成动画;其三是应用反向运动学的方法,使父子关系颠倒,通过各种约束关系,完成动画[2,3].
3.2变形仿真的实现
首先,需复制出多个车身模型.对各个模型添加“编辑多边形”修改器,使各个模型沿前后左右等不同方向发生单个单向变形.如图2(a)所示.之后,将这些车身模型添加到初始模型的变形器修改器下的不同通道里.然后只需调整不同通道的变形百分比数值,即可实现初始模型的任意变形.其中一种变形如图2(b)所示.最后,通过给初始车身模型添加关键帧,就可以完成车身的变形仿真动画.

2变形车身模型
3.3门盖机构运动仿真的实现
本文中将如图1中编号4、6所示的打包机主体、门盖及门盖液压缸视为骨骼系统,在这个系统中,所有部件共同组成一个封闭的运动链,打包机主体、门盖及门盖液压缸缸杆、液压缸缸筒组成一个四连杆机构,可将其视为一个摇杆滑块机构.在这个机构中,根据机构运动特点,可视门盖是一个运动整体,门盖液压缸是一个运动整体,打包机主体视为机架,故此机构中主要包含两个运动,门盖液压缸的运动和门盖的旋转运动.其中运动关系较为复杂的是门盖液压缸的运动,其既有缸头与门盖连接处的旋转、缸杆在缸筒内的滑动,又有缸筒绕其前部转轴相对于打包机主体的旋转.
根据骨骼系统中的正、反向运动学的原理可知,单纯由正向或反向运动学关系构成的运动链都是一个独立的运动链,无法形成一个封闭的运动链.针对门盖的机构特点,即一个封闭的四连杆机构,故需采用结合正、反向运动学的方法,同时构建正、反向运动链,使其能组成一个封闭的运动链.
在门盖机构的运动中,门盖的旋转运动较为简单,此处选择运动关系较为简单的正向运动学原理来完成此运动关系的建立.对于较为复杂的门盖液压缸的运动,同时也为了组建封闭的运动链,选择可以实现较为复杂运动关系定义的反向运动学原理完成此运动关系定义.打包机主体,作为此四连杆机构中的机架,其不发生运动,根据正、反向运动学的原理,可将打包机主体作为两条运动链的共同父物体.
3.3.1正向运动链的建立
在正向运动学中,父物体移动将带动子物体共同移动,而子物体自身的移动或转动将不会引起父物体的运动.本文中将如图3所示的门盖、打包机主体视为一个正向运动系统.将打包机主体链接为门盖的父物体.
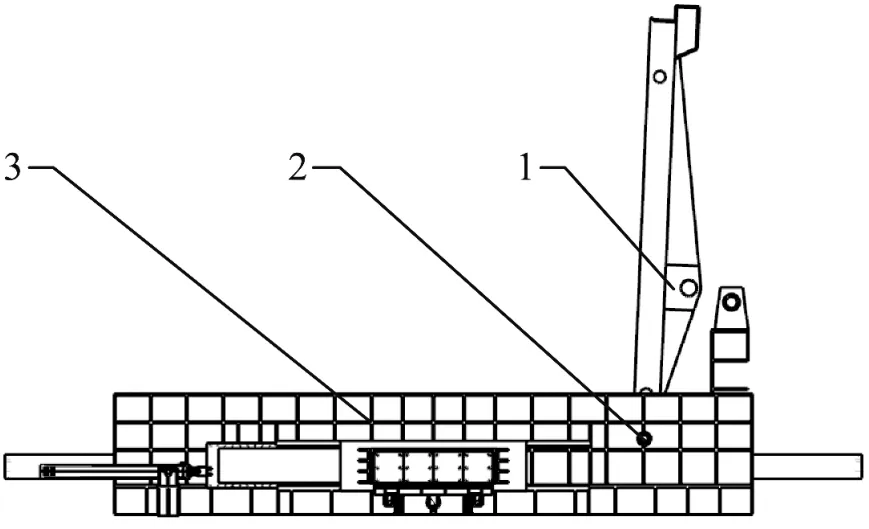
图3 打包机中的正向运动学关系
正向运动链建立完成后,只需给门盖添加相应的关键帧,便可以实现其绕与打包机主体联接转轴的旋转仿真动画.
3.3.2反向运动链的建立
反向运动学(Inverse Kinematics)在3DS Max的动画制作过程中扮演着重要的角色,其可以通过两种方法来完成动画的制作,一种是“交互式IK”,另一种是“IK解算器”[4].根据门盖液压缸运动的特点,及为了实现精确的机构运动仿真,本文选用具有运动约束关系定义的交互式IK的方法完成相关机构的运动仿真,如图4所示,以门盖液压缸缸头为基本子物体,将液压缸缸头、液压缸缸杆、液压缸缸筒、打包机主体,进行依次链接,链接为IK运动链.
在IK链建立时需定义父子链接时的相互关系,即子物体相对于父物体的运动关系,每个运动关系包括三个方向的滑动约束和三个方向的旋转约束.其中这些约束的定义均以其父物体的局部坐标系为参照.在图4所示的IK链中,打包机主体作为液压缸缸筒的父物体将限制其只有绕二者之间转轴的旋转运动.液压缸缸筒作为液压缸缸杆的父物体将限制其只有一个沿缸筒轴向的滑动.液压缸缸头和液压缸缸杆之间没有相对运动,将他们之间的自由度全部约束.
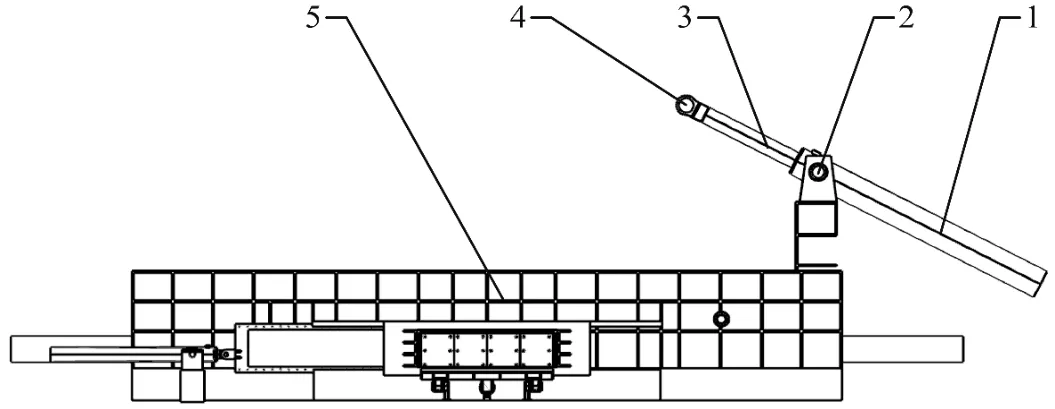
图4 打包机中的反向运动学关系
3.3.3门盖机构整体仿真的完成
正、反向运动链建立之后,二者互相独立,为完成整体动作,需将二者进行连接.由于在正、反向运动学中,一个物体只能有一个父物体,在门盖机构中,门盖和门盖液压缸缸头需进行连接,而二者都已经存在父物体,故需建立一个额外的物体才可将两个运动链连接在一起.此时可在液压缸缸头处建立一个虚拟体,将其Bind(绑定)到缸头上,同时,将其作为子物体链接到门盖和缸头的旋转轴处[5].在实际的工作过程中,此封闭运动链的驱动件为门盖液压缸,但在仿真过程中此运动链的定义具有其特殊性.门盖液压缸作为一个IK链,其运动只能通过对其末端子物体(液压缸缸头)添加关键帧才能实现.而缸头作为此IK链的末端子物体,其通过中间虚拟体与门盖相连.虚拟体作为门盖的子物体,在给门盖添加运动关键帧之后也将具有与门盖运动相关联的关键帧,而缸头作为虚拟体的绑定体也就具有了相应的关键帧,此时在3DS Max中的交互式IK环境下,点击“应用IK”按钮,软件将自行为整个IK链中的各个构件添加关键帧.至此,门盖的整个动作过程得以仿真完成.
3.4仿真的合成及动画输出
如上所述,打包机工作过程中的车身变形、门盖运动仿真动画已经分步完成,剩余的是如图1中编号1、2、5所示的推头和左右压头的机构运动仿真动画,这些部分的动画只需给其添加关键帧即可完成.
在3DS Max软件中,利用关键帧动画制作方法,将独立完成的机构运动与车身变形仿真各自的动画关键帧置于同一条时间轨迹栏之上,通过调节关键帧相互之间的时序关系,可以实现机构运动与车身变形的相互配合与连贯运动,即实现机构运动与车身变形的联合仿真,仿真的实现可以展示出汽车打包机真实的工作过程,并展示出由于相关机构的运动导致的车身变形,以及两种运动的同步、交叉运动情况.
动画输出之前,给打包机各部分添加相应的材质与灯光,使其更具有真实感,最后,渲染输出即可.
4 结论
本文以报废汽车拆解处理线后处理过程中的汽车打包机为研究对象,介绍了打包机的工作过程,分析了其机构特点及运动特征,并对仿真过程中的重点及难点做了分析.分变形和机构运动两部分对打包机工作过程仿真动画的制作做了介绍.此仿真的完成,解决了机构运动与不规则变形的联合仿真问题,通过仿真展现了打包机真实的工作过程,本文对汽车打包机工作过程的仿真研究,对机械运动仿真中涉及运动与变形的仿真提供了借鉴.
[1]陆平,陈熙,等.计算机三维动画制作教程—3DS Max[M].北京:人们邮电出版社,2010:233-332.
[2]IBRAHIM ZEID.Mastering CAD/CAM[M].America:McGraw Hill Higher Education,2007:324-572.
[3]田松,孔建益,杨金堂,等.基于3DS Max的机构动画仿真[J].湖北工业大学学报,2006,21(3):162-164.
[4]陶丽,佟凤义.3DS Max9三维动画制作典型案例[M].北京:清华大学出版社,2008:250-251.
[5]马正龙,邹淑平,.基于3DSMax的液压支架三维虚拟仿真[J].山东煤炭科技,2011,(6):103-104.
Thesimulation Research on the Mechanism Motion and the Deformation of Vehicleshell of Vehicle Packing Machine
YANG Erfeng1,2,ZHANG Yongjian1,2,DAI Guohong1,2,LEYunhui1
(1.School of Mechanical Engineering,Changshu Institute of Technology,Changshu 215500;2.Jiangsu Key Laboratory of Recycling and Reusing Technology for Mechanical and Electronic Products,Changshu 215500,China)
Aiming at the unitedsimulation requirement of mechanism motion and irregular deformation of vehicleshell related to the working process of vehicle packing machine during the working processsimulation ofscrap vehicle disassembling line,the characteristics of the working mechanism of vehicle packing machine were analyzed,the difficulties of thesimulation of mechanism motion and deformation of vehicleshell were researched,and twosolutions were presented tosolve the difficulties of thesimulation.Then 3DS Max was chosen to accomplish thesimulation after comparison.In this paper,the method of making deformationsimulation of vehicleshell by using morpher was introduced,and thesimulation of mechanism motion was accomplished by applying the forward and inverse kinematics theories.The co-simulation of the mechanism motion and the deformation of vehicleshell of vehicle packing machine were realized at last.
vehicle packing machine;3DSMax;morpher;forward and inverse kinematics
TP391.41
A
1008-2794(2015)04-0042-05
2015-06-11
江苏省产学研前瞻联合研究计划项目“废旧汽车拆解工艺系统及关键技术研究”(BY2015043-03)
戴国洪,教授,博士,研究方向:数字化制造工艺与装备、机电产品循环利用技术,E-mail:dgh@cslg.edu.cn.