一种滑块式快递包裹自动分拣机设计
2016-09-19颜志刚张福豹张强强戚嘉伟
颜志刚,张福豹,安 磊,张强强,成 濛,戚嘉伟
(南通大学机械工程学院,江苏南通226019)
一种滑块式快递包裹自动分拣机设计
颜志刚,张福豹,安磊,张强强,成濛,戚嘉伟
(南通大学机械工程学院,江苏南通226019)
介绍了快递包裹自动分拣机的分类及研究现状,完成了一种滑块式快递包裹自动分拣机总体方案设计、包裹换向机构和控制系统设计。设计的滑块式自动分拣机可以显著提高包裹分拣效率和准确率,对降低包裹订单处理时间,节约物流成本具有重要意义。
分拣机;滑块,快递;包裹;舵机
随着电子商务和网络购物的快速兴起,人们的消费习惯由线下的有限选择转向线上的无限选择,这种消费方式的改变给我国的快递行业带来了前所未有的机遇和挑战。国家统计局数据表明,2014年,全年快递业共揽件139.6亿件,同比增加了近50%.节假日的揽件数量增长尤为突出。以2013年“双十一”为例,快递行业共揽投快件3.46亿件,比2012年增长了73%,各地“爆仓”现象不断。原本只需要3天左右就能到达的商品,投递时间延长到7~10天,甚至部分商品耗时近半个月才到达客户手中,同时还出现了大量的商品损坏、错投、丢件及饱受诟病的“暴力分拣”等问题。2013-2014年全国快递行业基本情况表1所示。快递包裹的时效性成为制约我国目前电子商务发展的一大瓶颈。同时,随着近年来快递行业的迅猛发展,人工分拣和自动分拣的成本现值也在发生着变化,当快递总量达到一定值后,自动分拣的阶段性成本现值将小于手工分拣的阶段性成本[1]。自20世纪20年代起,国外就开始自动分拣技术及设备的研制,并应用于实践中,大型分拣系统虽然效率高,但占地面积大,前期投入巨大,通常需要几年的时间才能收回投资成本[2]。因此,设计一种适合中小快递公司的低成本、小体积且分拣效率高的自动分拣机成为快递行业的迫切需求。

表1 2013-2014年全国快递行业基本情况
2 快递包裹自动分拣机的分类
快递包裹自动分拣机根据配送中心的形状及货物状态可以分为直线型分拣机和环形分拣机两大类[3]。
2.1直线型分拣机
直线型分拣机具有直线开放性结构,如图1所示,可以通过直线型分拣机的矩阵方式的粗分拓展分拣分支,提高分拣效率。直线型分拣机根据分拣方式的不同又分为摆臂式、转向轮式、滑块式、垂直环状交叉带式等。
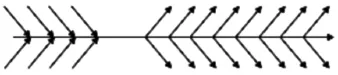
图1 直线型分拣机示意图
2.2环形分拣机
环形分拣机结构紧凑,所占空间较小。但环形分拣机为封闭设计,拓展性差,需在设计之初就考虑周全。环型分拣机根据分拣方式的不同又分为转盘式、落袋式、翻板式、水平环状交叉带式等。环形分拣机示意图如图2所示。

图2 环形分拣机示意图
3 滑块式快递包裹自动分拣机设计
3.1总体方案设计
滑块式分拣机是目前快递行业中最为常用的一种直线型分拣机,其工作原理是通过一个拨叉改变滑块的运行方向,在需要分拣的位置拨叉动作从而滑块沿着轨道将货物推出。滑块式分拣机分拣效率高,可分拣货物的重量及尺寸范围大。滑块式自动分拣机主要由控制装置和输送分拣装置两个部分组成,如图3所示。控制装置的主要作用是识别、接收和处理分拣信号,根据分拣信号的要求指示输送分拣部分动作,按照包裹的送达目的地对快递包裹进行自动分类。输送分拣部分主要包括输送装置、包裹换向装置和分拣道口组成。输送分拣装置根据控制装置发出的分拣指示,当具有相同分拣信号的包裹经过分拣道口时,换向装置动作,通过滑块的推动改变包裹的运行方向,使包裹进入分拣口。输送分拣装置由链轮、带耳链条、滑板和滑块组成,两侧连接若干分拣道口,滑板和滑块固定在带耳链条上承载包裹的输送。输送装置采用步进电机驱动。控制装置与输送分拣装置通过现场总线连接。
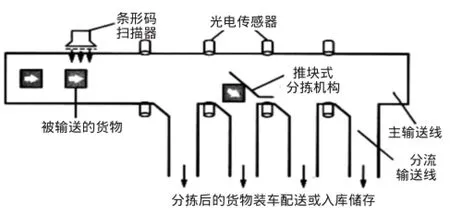
图3 滑块式快递包裹自动分拣机示意图
3.2快递包裹自动分拣方案
快递包裹分拣信息的获取来自设置在分拣线前端的条码扫描装置。条码扫描装置由光源、接收装置、光电转换部件、译码电路及PLC接口等部分组成。当光源发出的光线经过光学系统照射到二维条形码上面时,反射回来的光经过光学系统成像在光电转换器上,使之产生电信号,信号经过放大电路放大后产生模拟电压,它与照射到条形码符号上被反射回来的光成正比,再经过滤波、整形,形成与模拟信号对应的方波信号,经译码器编译为PLC可接收的信号。每个分拣口旁装有光电传感器,用于检测是否有货物通过传送带,配合各分拣执行机构动作。分拣时,PLC将从条码扫描装置接收到的信号进行分析后,传递给相应的光电传感器,当包裹接近传感器时,PLC给出信号控制滑块下方的舵机动作,改变滑块运动方向,推动包裹到达分拣道口。
3.3滑块换向方式设计
滑块变向装置包括导轨、滑块导向轮、变轨挡板和变轨舵机,如图4所示。变轨舵机安装在导轨的交叉口底部;变轨挡板安装在变轨舵机的旋转轴上;滑块导向轮运动时紧靠所述导轨的垂直面或所述变轨挡板的垂直面。滑块导向轮紧靠水平导轨垂直面并向前运动,但尚未运动到需要变轨的导轨交叉口,变轨舵机不工作,变轨挡板处于水平闭合状态。根据PLC的控制信号,变轨舵机控制变轨挡板旋转,使变轨挡板处于垂直开启状态;之后,滑块导向轮运动到需要变轨的导轨交叉口,紧靠变轨挡板垂直面;变轨挡板引导滑块导向轮进入另一轨道,实现滑块导向轮变轨装置的变轨功能。滑块导向轮已进入另一轨道,紧靠倾斜导轨垂直面。包裹分拣完成后,根据PLC控制信号,变轨舵机再次工作,使变轨挡板复位,处于水平闭合状态。

图4 滑块变向方式示意图
3.4控制系统设计
可编程逻辑控制器(PLC)是自动化生产线上协同执行机构、传感系统和辅助机构运动的重要控制手段[4]。本文设计的快递包裹分拣机控制系统以计算机(PC)为上位机,PLC为下位机对分拣机进行控制,实现初步的自动化。具体控制流程如图5所示。具体过程如下:当货物经扫描口,条形码扫描器对货物进行扫码,将读取的相应信息传送到计算机;计算机程序调用数据库信息,对扫描枪读取的信息进行比较,返回相应控制信息数据并传送给PLC;PLC进行数模转换,对相应变轨电机进行相应控制,即当货物途径所需出货口时,PLC控制相应变轨电机旋转相应角度,使变轨挡板打开,变轨滑轮沿变轨挡板和轨道成一定角度运动,带动滑块沿托板运动,使滑块推动货物进入出货口,实现分拣功能。
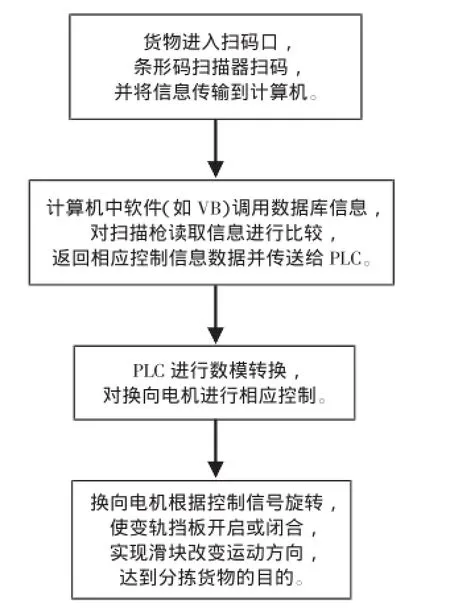
图5 分拣机控制流程图
设计制作完成的滑块式快递包裹分拣机能够完成包裹上条形码的自动扫描识别,通过PC上位机和快递包裹分拣机PLC控制系统的有效结合,可以有效控制分拣机构舵机的换向动作,实现了对快递包裹的连续、大批量、高效和低错差率的分拣。
4 结束语
快递包裹分拣是快递包裹配送中的重要环节,采用自动分拣系统可以显著提高包裹的分拣效率和准确率。本文完成了一种滑块式快递包裹自动分拣系统的设计,采用舵机方式实现了滑块的变向,研究成果为滑块式自动分拣机的设计提供参考。
[1]高小茜.浅析我国快递企业的分拣问题[J].商场现代化,2014,(29):55-57.
[2]张俊涛,刘红科.基于ARM的快递货物自动分拣系统的设计[J].化工自动化及仪表,2011,(08):968-970.
[3]姜徳智.快递行业自动分拣设备浅析[J].物流技术与应用(货运车辆),2012,(10):54-55.
[4]范昭君.基于MCGS和PLC的物料分拣监控系统[J].装备制造技术,2014,(4):101-103.
Design ofan Automatic Sorting Machine for Express Parcel
YAN Zhi-gang,ZHANG Fu-bao,AN Lei,ZHANG Qiang-qiang,QIJia-wei
(School ofMechanical Engineering,Nantong University,Nantong Jiangsu 226019,China)
The classifications of sorting machines and the research status of express parcel automatic sorting line were introduced in this paper.The overall design scheme,the parcel reversing mechanism and the control system design of the slipper-type express parcel automatic sorting line were described in details.The slipper-type express parcel automatic sorting line which was designed can significantly improve the efficiency and the accuracy of sorting packages,there are importantmeanings for reducing the time to deal with the parcel order and saving the cost of logistics.
sortingmachine;sliding block;express delivery;package;steering engine
TH122
A
1672-545X(2016)06-0023-02
2016-03-09
国家级大学生创新创业训练计划项目(201410304017)
颜志刚(1994-),男,江苏苏州人,本科,研究方向为机械工程及自动化专业;张福豹(1982-),男,江苏铜山人,研究生,副教授,主要从事机械制造及其自动化方面的研究工作。
