利用曲率和相关矩阵的角点检测算法
2016-07-22李云红陈双双
李云红,赵 强,陈双双
(西安工程大学 电子信息学院,陕西 西安 710048)
利用曲率和相关矩阵的角点检测算法
李云红,赵强,陈双双
(西安工程大学 电子信息学院,陕西 西安 710048)
摘要:为提高定位准确性并抑制噪声,利用多方向Gabor滤波器,提出基于曲率和相关矩阵的角点检测方法.首先利用Canny边缘轮廓检测器提取图像的边缘并填充缺口;其次计算边缘像素点的曲率;然后利用多方向Gabor滤波器的虚部对原始图像进行平滑,对每个边缘像素及其邻域构造相关矩阵,利用相关矩阵的归一化特征值计算角点准则函数,将角点准则函数值与边缘像素点的曲率的乘积做为角点测度;最后利用非极大值抑制对候选角点进行筛选.分别在无噪声和噪声情况下进行实验,结果表明,与Harris,CPDA,He&Yung角点检测算法相比,该方法可以有效地抑制噪声,平均配准角点数提高了19.6%和25.6%,平均定位误差约降低了6.5%和9.2%.
关键词:Gabor滤波器;曲率;相关矩阵;归一化特征值;非极大值抑制
0引言
角点在图像中具有局部不变的稳定特征.一个成功的角点检测可以应用在很多领域,比如目标识别[1],目标追踪[2],三维重建[3]等.在实际情况下,图像因受到光照、旋转、尺度或者噪声等诸多环境因素的影响而发生变化.角点受这些变化的影响很小,所以可以通过检测角点来提取图像的特征.一般地,角点定义为图像中亮度变化剧烈的点,包括交叉点、拐点和斑点.
角点检测方法大致可以分为两类:基于灰度的和基于轮廓边缘的角点检测算法.基于灰度的检测算法是利用图像灰度的一阶偏导来检测角点.早期Moravec[4]提出的Moravec算子直接从原始图像上检测角点,这种方法速度较快但对噪声非常敏感.从Moravec的思想出发,Harris等[5]提出了著名的Harris检测算法,为后续的研究奠定了基石.Harris检测器有很多优点,例如旋转不变性和对部分仿射变换具有不变性,但是它对尺度很敏感,且不具备几何尺度不变性,检测到的角点类型也有局限[6],只对“L”型角点有很好的检测性能.随着多尺度和多方向灰度变化信息的引入,一些较为稳定的检测器如log-gabor小波[7]和剪切波[8]被广泛地渗透到边缘和角点检测中.基于边缘轮廓的检测算法主要通过分析图像边缘性质来检测角点.首先提取原始图像的边缘轮廓,然后从边缘轮廓中提取闭合或者非闭合的轮廓曲线,最后通过计算边缘线上的曲率值,利用多边形近似搜索交叉点或者梯度方向变化来提取角点.Mokhtarian等[9]采用曲率尺度空间(Curvature Scale Space, CSS)的检测算法,该理论采用大尺度追踪小尺度定位的方法来筛选候选角点,有较好的检测性能,但存在3个问题:一是用二阶导数计算曲率会对曲线的局部变化和曲线上的噪声敏感;二是需要选取合适的高斯尺度平滑边缘轮廓曲线;三是需要选择合适的全局门限.Mohammad等[10]提出了弦到点距离累加(Chord-to-point Distance Accumulation, CPDA)技术,该算法利用曲率乘积能增强一些角点的准确率,然而也会把另外一些弱角点去除,门限选择是根据经验,也会影响检测结果的准确率.He等[11]提出了自适应曲率门限算法,该算法虽然克服了CSS算法的门限选择问题,但仍存在对噪声敏感和尺度选择的问题,因此这类方法还存在改进空间.
Gabor滤波器[12]拥有和脊椎动物视觉皮层感受野响应近似相似的性质,若将一副图像分解为局部对称和反对称的基函数,正好与Gabor函数近似,且通过旋转、平移、尺度变化形成的Gabor函数族,能够近似表征一副图像,常被用于指纹识别[13]、特征提取[14]和人脸识别[15]等领域,因此可以被用来平滑图像和提取多个方向的灰度变化信息.为了缓解噪声的影响和提高角点的定位准确率,本文将边缘曲率与图像幅值响应的自相关特征值结合起来,利用自相关矩阵特征值与曲率之积建立角点测度进而提取角点,从而抑制边缘噪声并增强角点处的幅值响应,有效地提高了角点的定位准确性和噪声的鲁棒性.
1二维Gabor滤波器及角点检测算法
1.1二维Gabor滤波器
在空间域中,二维连续的Gabor滤波器是由正弦平面波调制的高斯函数.Pellegrino等[16]指出Gabor 滤波器的虚部能够很好地提取图像像素各个方向的灰度变化信息.Gabor 滤波器虚部的定义式为

x′=xcosθ+ysinθ,
(1)
y′=-xsinθ+ycosθ.
其中,γ,η分别为沿x轴和y轴方向的锐度,通过设置不同的γ,η值,可以改变滤波器的形状.f是滤波器的中心频率,θ是调制平面波与高斯主轴沿逆时针方向的旋转角度.
对一幅输入图像,Gabor滤波器虚部幅值响应,可以通过滤波器与图像卷积得到,即

(2)
在实际中,图像绝大多数是离散的二维信号,需要将连续的滤波器离散化.图像特征提取需要获得像素各个方向的灰度变化信息,所以采用沿着不同方向的滤波器平滑图像,离散化的图像沿着θk方向的Gabor滤波器虚部幅值响应为

(3)
1.2边缘线上的角点测度
基于边缘轮廓的角点检测对边缘曲线的局部微小变化和噪声敏感,而且利用Canny[17]边缘检测器抽取的边缘有断裂[9],会导致虚假角点的产生,因此需要对边缘进行填充,获得较为完整的边缘轮廓.图1(a)给出了部分边缘检测结果图,先对边缘缺口进行标记,如图1(b)中“∘”标记,当两个缺口之间的位置小于等于3个像素时,直接连接.边缘填充后的结果图如图1(c)所示.
对于每条边缘I(x(u),y(u)),x(u),y(u)分别是曲线的水平竖直分量,计算其上每个像素点的曲率为
(4)
其中,xu=x(u)⊗g′(u),xuu=x(u)⊗g″(u),“⊗”为卷积符号,g(u)为高斯函数,g′(u)和g″(u)分别为其一阶和二阶导数,这样便得到了边缘线像素点的曲率.角点处的曲率为局部极大值,直线上像素曲率为0.
实际中,决定边缘像素点是否是角点不但与该点的曲率值有关,而且与其邻域有关.文中利用Gabor滤波器的虚部对边缘及其邻域像素进行平滑处理(假设窗口l大小为3×3),得到边缘及其邻域像素的N个方向的梯度响应,构造9×N大小的矩阵M:
(5)
其中ζ(m,n,k)为式(3)定义的幅值响应,则像素I(m,n)幅值响应的自相关矩阵为
Σ(I)=MT(I)M(I).
(6)
从式(6)可以看出,自相关矩阵是实对称的,所以对应的特征值均为非负实数,且每个像素对应K个特征值(λ1,λ2,…,λK).文献[18]指出,特征值的大小能说明该像素点所在位置,特征值均很大,表示像素点处灰度变化剧烈,判定为角点;特征值有大有小,则为边缘点;特征值均很小,则为同质区域点.计算每个像素的归一化特征值,即
(7)
则新的角点测度γ(i)定义为
γ(i)=κ(i)R(i).
(8)

图2比较了3种测度在测试图像中的性能.测试图像如图2(a)所示,边缘轮廓由Canny边缘检测器得到,如图2(b)所示,测试图像角点如图2(c)所示.3种角点测度结果由图2(d)~(f) 所示.边缘曲率对边缘曲线的微小变化及噪声比较敏感,其角点测度在边缘位置有明显的锯齿效应,而自相关矩阵特征值性能更差一些.新的角点测度将二者相乘,减轻了边缘锯齿效应,如果给出合适的阈值,将会检测到准确的角点.1.3角点检测算法流程
本文提出的利用曲率和相关矩阵的角点检测算法由以下6个步骤构成.
(1) 利用Canny边缘轮廓检测器提取图像边缘并填充缺口,得到较为完整的边缘轮廓.
(2) 计算边缘线上像素点的曲率值κ(u).
(3) 利用Gabor滤波器的虚部平滑图像边缘得到边缘像素及其邻域的多个方向梯度幅值响应,构造局部自相关矩阵Σ(I),计算对应的归一化特征值η(i),得到角点准则函数R(i).
(4) 将曲率值与角点准则函数的乘积作为边缘像素的角点测度γ(i).
(5) 若γ(i)大于预先设定的阈值T,则判定为角点.
(6) 用像素的窗对候选角点进行非极大值抑制,即在邻近边缘像素内,只保留测度值最大的点,并把它标记为角点.
2结果与分析
为了验证利用曲率和相关矩阵的角点检测算法的检测性能,以积木图和实验室图(如图3所示)为例,采用Harris[5],CPDA[10],He&Yung[11]算法及本文提出算法进行角点检测并比较各个算法的检测性能.
使用20幅图像在无噪声和加高斯噪声下计算平均检测率来测试算法的参数.首先对Gabor滤波器参数进行选择,如表1所示.通过比较两种情况下平均检测率,得出Gabor滤波器参数为γ=0.55,η=0.552,方向K取81.然后考虑滤波器窗长l对实验结果的影响,如表2所示,当窗长l大小为6时,邻域大小为6×6,检测率最高,所以本文取窗长为6,邻域大小为6×6来计算自相关矩阵.最后确定阈值T以及非极大值抑制窗口w,如表3所示,阈值取为0.6,非极大值抑制窗口取为5×5.
Harris算法程序来自Matlab自带程序,CPDA和He&Yung算法程序分别由文献[10]和[11]提供.参考角点图如图4所示,积木图和实验室图的参考角点数分别为59和249.无噪声条件下4种算法对积木图像的检测结果如图5所示.

表 2 Gabor邻域窗长的选择
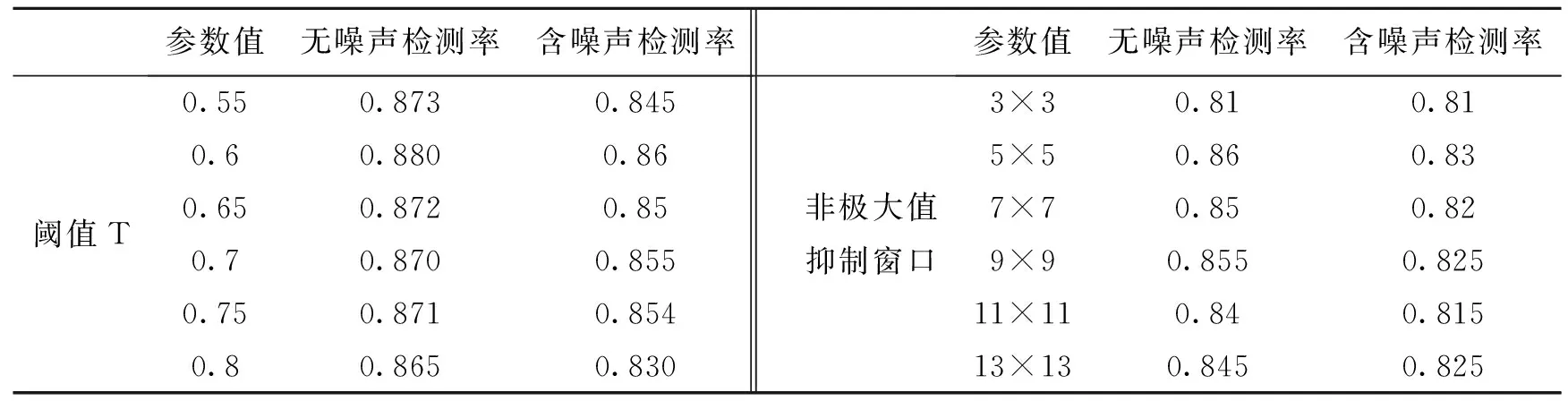
表 3 阈值T和非极大值抑制窗w的选取
为了比较算法的噪声鲁棒性,对积木图加入了方差为100的高斯噪声,检测结果如图6所示.
本文采用文献[10]提出的平均重复率Ravg和定位误差Lerror来分析不同检测器的性能.平均重复率表示测试图与真实图角点的匹配率,定义为
Ravg=0.5×Nr×(1/N0+1/Nc).
(9)
其中Nr为重复的角点数,N0为真实角点数,Nc为检测器在测试图上检测到的角点数.当检测到的角点与真实角点的位置小于4个像素时,Nr取为1,以此类推.定位误差Lerror表示测试图与真实图角点的偏离程度,定义为
(10)
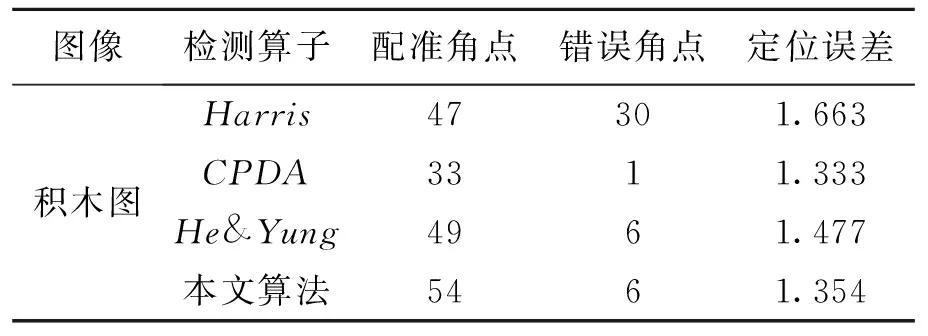
表 5 加入噪声积木图的匹配结果
从表4~5可以看出,与Harris算法相比,其他3种算法的检测性能更好一些,在噪声方面,CPDA算法的定位误差最小,但它丢失的角点数最多.实验室图像结构较为复杂,每种算法丢失和错误角点数目较多,因此没有对其进行加噪检测.经计算,所提算法的平均配准角点数提高了19.6%和25.6%,平均定位误差降低了6.5%和9.2%.
3结束语
根据图像的边缘轮廓,本文提出一种基于曲率和相关矩阵的角点检测算法.该算法利用Gabor滤波器虚部平滑图像,得到了各个方向的灰度变化信息,通过将曲率与角点准则函数值的乘积做为角点测度,有效地对角点进行了定位并缓解了噪声的影响.通过对比实验和数据分析,本算法在配准角点数和定位误差上优于其他3种算法.
参考文献(References):
[1]KAFAIM,ANL,BHANUB.Referencefacegraphforfacerecognition[J].IEEETransactionsonInformationForensics&Security,2014(9):2132-2143.
[2]孟繁杰,郭宝龙.使用兴趣点局部分布特征及多示例学习的图像检索方法[J].西安电子科技大学学报,2011,38(2):47-53.
MENGFanjie,GUOBaolong.Imageretrievalbyusinglocaldistributionfeaturesofinterestpointsandmultiple-instancelearning[J].JournalofXidianUniversity,2011,38(2):47-53.
[3]赵璐璐,耿国华,王小凤,等.基于未标定多幅图的三维重建算法[J].计算机应用,2012,32(10):2802-2805.
ZHAOLulu,GENGGuohua,WANGXiaofeng,etal.Threedimensionalreconstructionalgorithmbasedonuncalibratedmultipleimages[J].JournalofComputerApplications,2012,32(10):2802-2805.
[4]MORAVECHP.Obstacleavoidanceandnavigationintherealworldbyaseeingrobotrover[D].California:StanfordUniversity,1980.
[5]HARRISC,STEPHENSM.Acombinedcornerandedgedetector[C]//AlveyVisionConferencePlesseyResearchRokeManor,UK,1988,15:50.
[6]WANGH,BRADYM.Real-timecornerdetectionalgorithmformotionestimation[J].ImageandVisionComputing,1995,13(9):695-703.
[7]GAOXT,SATTARF,VENKATESWARLUR.Multiscalecornerdetectionofgraylevelimagesbasedonlog-gaborwavelettransform[J].IEEEInternationalConferenceonAcoustics,Speech&SignalProcessing,2007,1(7):868-875.
[8]YIS,LABATED,EASLEYGR,etal.Ashearletapproachtoedgeanalysisanddetection[J].IEEETransactionsonImageProcessing,2009,18(5):929-941.
[9]MOKHTARIANF,SUOMELAR.Robustimagecornerdetectionthroughcurvaturescalespace[J].IEEETransactionsonPatternAnalysis&MachineIntelligence,998,20(12):1376-1381.
[10]AWRANGJEBM,LUG.Robustimagecornerdetectionbasedonthechord-to-pointdistanceaccumulationtechnique[J].IEEETransactionsonMultimedia,2008,10(6):1059-1072.
[11]HEXC,YUNGNHC.Cornerdetectorbasedonglobalandlocalcurvatureproperties[J].OpticalEngineering,2008,47(5):057008.
[12]DAUGMANJG.Uncertaintyrelationforresolutioninspace,spatialfrequency,andorientationoptimizedbytwo-dimensionalvisualcorticalfilters[J].JournaloftheOpticalSocietyofAmerica,1985,2(7):1160-1169.
[13]毛元,冯桂,汤继生.采用八方向Gabor滤波的指纹识别算法 [J].华侨大学学报:自然科学版,2013,34(2):151-155.
MAOYuan,FENGGui,TANGJisheng.FingerprintrecognitionalgorithmbasedontheeightdirectionsGaborfilter[J].JournalofHuaqiaoUniversity:NaturalScience,2013,34(2):151-155.
[14]闫勇刚,欧阳健飞,马祥,等.基于2-DGabor滤波器的光学定穴体表特征提取方法[J].红外与激光工程,2014,43(5):1685-1689.
YANYonggang,OUYANGJianfei,MAXiang,etal.Featureextractionofanatomicallandmarkusing2-DGaborfiltersforlocalizingacupoints[J].InfraredandLaserEngineering,2014,43(5):1685-1689.
[15]刘晓旻,章毓晋.基于Gabor直方图特征和MVBoost的人脸表情识别[J].计算机研究与发展,2015,44(7):1089-1096.
LIUXiaomin,ZHANGYujin.FacialexpressionrecognitionbasedonGaborhistogramfeatureandMVBoost[J].JournalofComputerResearchandDevelopment,2015,44(7):1089-1096.
[16]PELLEGRINOF,VANZELLAW,TORREV.Edgedetectionrevisited[J].IEEETransactionsonSystems,ManandCybernetics,PartB:Cybernetics,2004,34(3):1500-1518.
[17]CANNYJ.Acomputationalapproachtoedgedetection[J].IEEETransactionsonPatternAnalysis&MachineIntelligence,1986,8(6):679-698.
[18]赵万金,龚声蓉,刘纯平,等.一种自适应的Harris角点检测算法[J].计算机工程,2008,34(10):212-214.
ZHAOWanjin,GONGShengrong,LIUChunping,etal.AdaptiveHarriscornerdetectionalgorithm[J].ComputerEngineering,2008,34(10):212-214.
[19]屠礼芬,彭祺,仲思东.一种适应相机抖动的运动目标检测方法[J].电子与信息学报,2013,35(8):1914-1920.
TULifen,PENGQi,ZHONGSidong.Amovingobjectdetectionmethodadaptedtocamerajittering[J].JournalofElectronics&InformationTechnology,2013,35(8):1914-1920.
编辑:武晖;校对:师琅
文章编号:1006-8341(2016)02-0262-07
DOI:10.13338/j.issn.1006-8341.2016.02.022
收稿日期:2015-10-20
基金项目:陕西省教育厅科研计划资助项目(14JK1319);西安工程大学控制科学与工程学科群建设经费资助项目(107090811)
通讯作者:李云红(1974—),女,满族,辽宁省锦州市人,西安工程大学教授,研究方向为红外热像技术及信号与信息处理.E-mail:hitlyunhong@163.com
中图分类号:TP 391.4
文献标识码:A
Corner detection with curvature and relation matrix
LIYunhong,ZHAOQiang,CHENShuangshuang
(School of Electronic and Information, Xi′an Polytechnic University, Xi′an 710048, China)
Abstract:In order to improve the positioning accuracy and suppress noise, the corner detection method based on curvature and relation matrix is proposed by using multi-direction Gabor filters. Firstly, Canny edge contour detector is used to extract edge map and fill gaps. Secondly, the curvature of edge pixels is calculate. Then the imaginary parts of Gabor filter is used to smooth the input image and build the relation matrix of edge pixel and its neighbour, the multiplication of the corner criterion function value computed by normalized eigenvalue of relation matrix and the edge pixel′s curvature is served as corner measure. Finally, use the non-maximum suppression to select the candidate corner. The experiment results contained with noise and noise-free show that the proposed method can suppress noise effectively compared with Harris, CPDA, He&Yung algorithms, and the average matched corner number increases by about 19.6% and 25.6% respectively, and the positioning error reduces by about 6.5% and 9.2%, respectively.
Key words:Gabor filter; curvature; relation matrix; normalized eigenvalue; non-maximum suppression
引文格式:李云红,赵强,陈双双.利用曲率和相关矩阵的角点检测算法[J].纺织高校基础科学学报,2016,29(2):262-268.
LI Yunhong,ZHAO Qiang,CHEN Shuangshuang.Corner detection with curvature and relation matrix[J].Basic Sciences Journal of Textile Universities,2016,29(2):262-268.
