主被动传感器空时对准融合模型目标跟踪技术*
2016-07-21盛丹王国宏孙殿星杨忠
盛丹,王国宏,孙殿星,杨忠
(海军航空工程学院 信息融合研究所,山东 烟台 264001)
探测跟踪技术
主被动传感器空时对准融合模型目标跟踪技术*
盛丹,王国宏,孙殿星,杨忠
(海军航空工程学院 信息融合研究所,山东 烟台264001)
摘要:针对主被动传感器量测的时空不同步和定位的非线性,以提高跟踪精度为目的,构建了空时对准融合跟踪模型。通过牛顿插值法实现了时空量测的同步,并基于融合算法建立了模型的滤波算法。最后,在匀速直线运动目标和机动目标的背景下验证了时空对准融合跟踪模型对目标的跟踪效果,在主被动传感器信息利用、提高精度等方面具有一定的理论和实际意义。
关键词:主被动传感器;牛顿插值法;同步;融合;目标跟踪;粒子滤波
0引言
在激烈的电子侦察与反侦察斗争中,压制干扰[1-3]对传感器的检测、识别、跟踪[4-5]等性能产生了严重的影响,严重制约和限制了传感器的作用范围,甚至对传感器自身的生存造成威胁。多传感器信息融合[6]是一种有效的抗压制干扰途径,目前该方向的研究主要有2方面:一方面是压制干扰下多传感器信息融合的目标检测性能;另一方面是在强压制干扰通过测向交叉定位[7-8]进行目标定位和跟踪。被动传感器可以获得辐射源的方向,因此,严重干扰下可以通过测向交叉定位进行目标定位和跟踪。文献[9]假设目标到雷达基线的距离为常数的条件下研究了传感器的布局问题。文献[10]给出在最小定位模糊区面积准则下多个被动传感器的布站准则。文献[11]将目标到基线的垂直距离与基线长度的比值作为约束条件,通过拉格朗日乘子法求得无源定位系统中的最优交会角。文献[12]给出了2部2D被动传感器在方位和俯仰测角误差不同的情况下,最优交会角与俯仰角的关系。但是,交叉定位的定位精度一般较低,而采用主被动传感器[13]量测信息融合目标跟踪也是一种有效的压制干扰下目标跟踪方法。文献[14]构建了STMHM算法解决了目标的实时跟踪和识别,被动传感器主要用于目标识别。文献[15]研究了如何合理、实时地切换主被动传感器的问题。
1时空校准目标定位
1.1问题描述
采用1部主动传感器(传感器1)和1部被动传感器(传感器2)进行目标跟踪,空中目标为压制干扰机。主被动传感器目标定位如图1所示。
图1 主被动传感器目标定位示意图Fig.1 Diagram of target location with passive and active sensors
1.2时间校准
一般情况下,主被动传感器的采样频率不同,主动传感器的数据率要低于被动传感器,即相同时间内主动传感器获得的数据批数要少于被动传感器,要进行信息的融合,需要首先进行时间和空间对准。假设两部传感器的数据是在同一坐标系下测得的,因此,量测数据在空间上是一致的,只需进行时间校准。
取一段较短时间进行时空对准说明,定义目标出现时被动传感器的量测数据按照0时刻初始化,在相对时间t主动传感器获得量测,假设主、被动传感器的测量间隔分别为T,T*,目标量测空间及融合空间如图2所示。
高职教育的专业建设,直接决定着该专业学生该学什么、学到什么程度和怎么学的问题。所以,专业建设直接规定着工匠精神培育当中的“术”的层面的要求。为此,必须积极推动高水平的专业建设来确保技能型人才的培养方向。
图2 目标量测融合空间Fig.2 Fusion space of target measurements

(1)
(2)
时间对准后,主被动传感器的方位观测得以空间对准,可以采用主动定位、主被动交叉定位、融合定位等方法获得目标的位置估计。
2目标定位算法
根据图1,主动定位获得的目标位置估计为

(3)
主被动传感器交叉定位获得的目标位置估计为

(4)
融合定位采用数据压缩将主动定位与交叉定位结果进行加权融合,融合权重为

(5)

(6)


(7)
融合后协方差为

(8)
定位的效果可以采用定位误差来进行衡量,目标位置的均方根误差为
(9)
结合3种定位方法的定位协方差关系,可以判断融合定位具有较优的定位效果。
3空时对准融合模型的滤波算法
在直角坐标系中,目标状态方程可以采用线性模型,便于预测和滤波,而传感器的量测是在视线坐标下获得的,因此在直角坐标系中建立的量测方程是非线性的,从而在校准空间构建非线性滤波模型,而粒子滤波不受线性化误差或高斯噪声假定的限制,适合于任何环境下的任何状态转化或量测模型。采用融合定位时空时对准融合模型的滤波流程如图3所示。
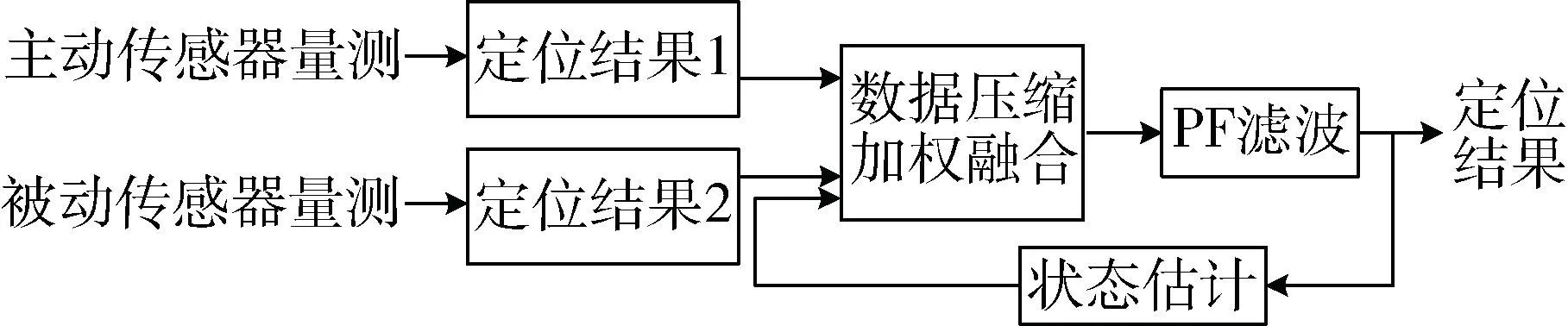
图3 空时对准融合模型滤波算法流程Fig.3 Flow chart of the filtering algorithm of the STFM
目标的状态方程可以表示为
X(k+1)=FX(k)+Γ(k)V(k),
(10)

(11)
量测方程为
Z(k+1)=h(k+1,X(k+1))+W(k+1),
(12)
式中:W(k+1)为0均值高斯量测噪声。
对传感器1,有
h1(k+1,X(k+1))=

(13)

X(k+1))+W1(k+1).
(14)
对传感器2,有

(15)
Z2(k+1)=θ2(k+1)=h2(k+1,X(k+1))+
W2(k+1),
(16)
分别进行传感器1主动定位和传感器1,2交叉定位,并将定位结果通过数据压缩加权融合,所得结果定义为量测,如式(7)所示。
获得目标量测后,可以根据后验概率密度p(X0∶k|Z1∶k)进行采样,由于直接从p(X0:k|Z1∶k)中采样比较困难,通常用重要性概率密度π(X|Z)获取样本值,据此得到k时刻随机样本第i个样本的权重为
(17)
滤波过程中可以近似为

(18)
式中:zi(k+1)为粒子的量测预测。对于时间的增长带来的粒子权值协方差变大的现象,采用重采样的方法将粒子重新排序,将权重大的粒子进行归一化融合。
4仿真分析
假设目标为压制干扰机,主动传感器不受干扰,能够获得目标的距离和方位量测,被动传感器能够获得目标的方位量测,2部传感器位置分别设定为(0,0)km和 (30,0)km,角度量测误差标准差相同,设定为σθ1=σθ2=0.1°,主动传感器的距离量测误差为σr=100m。主动传感器的采样周期为1s,被动传感器的采样周期为0.5s,主被动传感器各量测50个周期。蒙特卡罗仿真100次。
分别验证对匀速直线运动目标和曲线运动目标的跟踪效果。匀速直线运动目标初始位置为(10,25)km,初始速度为(200,0)km。曲线运动目标的初始位置为(10,25)km,初始速度为(300,0)km,加速度设定如表1所示。

表1 曲线运动目标加速度
(1) 时空对准前后3种定位方法的平均误差仿真结果与分析,如表2所示。

表2 时空对准前后定位方法跟踪效果比较
从表2中可以看出:方位距离的定位效果变换不大,这是因为对准时刻是以主动传感器的量测时刻为准进行的。交叉定位的平均定位误差要低于主动传感器的定位误差,这是因为在本试验条件设定下,传感器的布局导致交叉定位的效果优于主动传感器定位效果。从平均误差可以看出融合定位占有明显的优势。
(2) 空时对准后的目标跟踪效果仿真结果及分析。
1) 匀速直线运动目标跟踪效果,见图4,5。
2) 机动目标跟踪效果,见图6,7。
从图5,7可以看出,融合定位方法的总体效果明显优于其他2种方法,不受传感器与目标的布局影响,而交叉定位方法效果受传感器与目标布局影响较大。另外传感器与目标的布局也影响着滤波误差的收敛性。
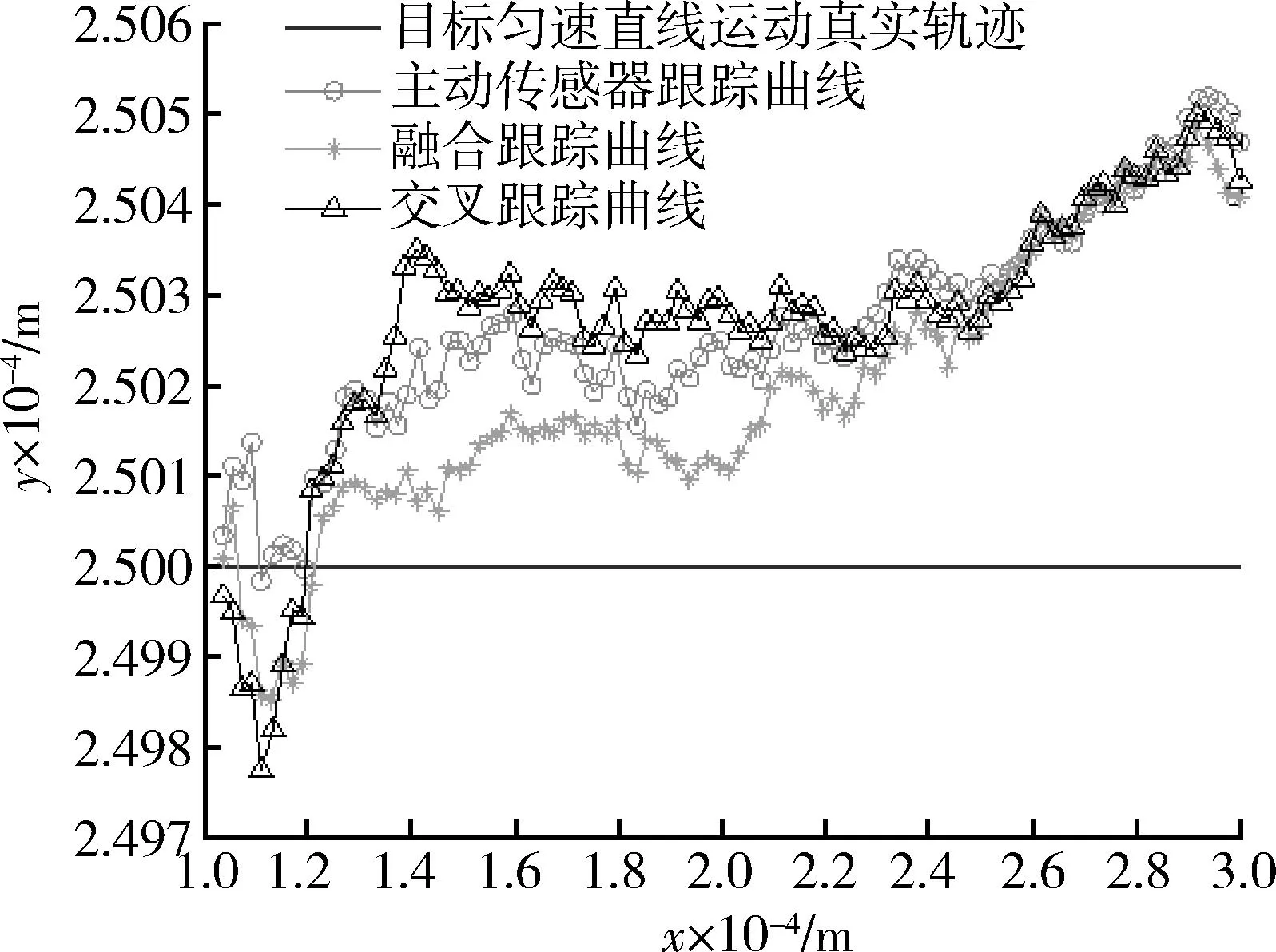
图4 3种方法跟踪效果图Fig.4 Tracking results of three methods
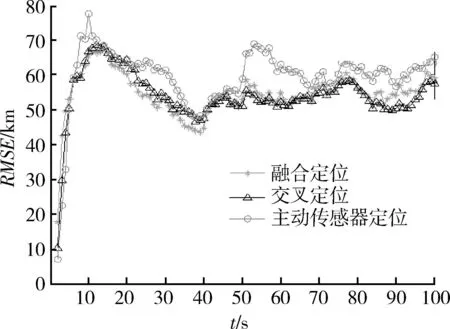
图5 3种跟踪方法距离误差Fig.5 Range errors of the three methods
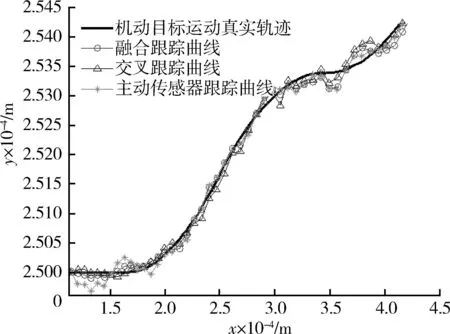
图6 3种方法跟踪效果图Fig.6 Tracking results of three methods
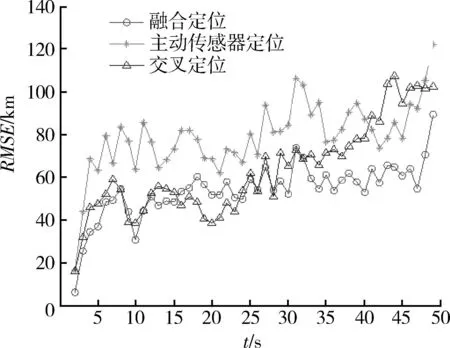
图7 3种跟踪方法距离误差Fig.7 Range errors of the three methods
5结束语
采用主被动传感器对目标进行跟踪时,量测信息往往是不同步的,本文构建了空时对准融合跟踪模型。牛顿插值法实现了主被动传感器量测的同步,融合定位方法能够得到较高的定位精度,建立的模型的滤波算法能够实现机动目标和非机动目标的较精确跟踪。这在主被动传感器目标跟踪时量测信息的融合及跟踪精度的提高等方面都具有一定的实用价值。
参考文献:
[1]JINGJ,WENS.SimulationonDetectionProbabilityLossofOTHRUnderOppressiveActiveJamming[J].AppliedMechanicsandMaterials, 2014, 701: 544-548.
[2]ZHANGQY,CAOB,WANGJ,etal.PolarizationFilteringTechniqueBasedonObliqueProjections[J].ScienceinChina:InformationSciences,2010(5):1056-1066.
[3]王象, 杨建华, 闵涛, 等. 基于雷达对抗试验等效推算的密集压制干扰研究方法[J].宇航学报, 2012 , 33 (2):217-221.
WANGXiang,YANGJian-hua,MINTao,etal.StudyonDensenBarrageJammingBasedonEquivalentReckoningofRadarECMTest[J].JournalofAstronautics,2012,3(2):217-221.
[4]LID,LIUJian-ye,QIAOLi,etal.FaultTolerantNavigationMethodforSatelliteBasedonInformationFusionandUnscentedKalmanfilter[J].JournalofSystemsEn-
gineeringandElectronics, 2010, 21(4):682-687.
[5]YANXue-hua,LIUYun-gang.GlobalPracticalTrackingNonlinearSystemswithbyOutput-FeedbackforUnknownGrowthRate[J].ScienceinChina:TechnologicalSciences,2011, 54(10): 2079-2090.
[6]周卫东,刘萌萌,杨永江.基于多传感器信息融合理论的交互式多模型算法[J].华南理工大学学报:自然科学版,2014,42(9):82-89.
ZHOUWei-dong,LIUMeng-meng,YANGYong-jiang.AnImprovedInteractingMultipleModelAlgorithmBasedonMulti-sensorInformationFusionTheory[J].JournalofSouthChinaUniversityofTechnology:NaturalScienceed, 2014, 42(9):82-89.
[7]HATEMH,KUTLUYILD.PassiveLocalizationofScanningEmitters[J].IEEETransactionsonAerospaceandElectronicSystems,2010,40(5):907-910.
[8]CAOY,Mike,CHENSW.Cross-LayerModelingandSimulationofCircuitReliability[J].IEEETranctionsonComputer-AidedDesignofIntegratedCircuitsandSystems,2014, 33(1):8-23.
[9]修建娟,何友,王国宏.测向交叉定位系统中的交会角研究[J].宇航学报,2005,26(3):282-286.
XIUJian-juan,HEYou,WANGGuo-hong.StudyonCutAngleofDirectionFindingLocationSystem[J].JournalofAstronautics, 2005, 26(3):282-286.
[10]WANGGH,BAIJ,HEY,etal.OptimalDeploymentofMultiplePassiveSensorsintheSenseofMinimumConcentrationEllipse[J].IETProceedingsonRadar,Sonar&Navigation,2009,3(1):8-17.
[11]白晶,王国宏,王娜,等.测向交叉定位系统中的最优交会角研究[J].航空学报,2009,30(2):298-304.
BAIJing,WANGGuo-hong,WANGNa,etal.StudyonOptimumCutAnglesinBearing-onlyLocationSystems[J].JournalofAstronautics, 2009,30(2): 298-304.
[12]王国宏,苏伟,白晶,等.不同量测误差情况下1D和2D被动传感器交叉定位系统最优交会角研究[J].电子学报,2009,37(6):1296-1299.
WANGGuo-hong,SUWei,BAIJing,etal.StudyonOptimalCutAnglein1Dand2DPassiveSensorTriangulationwithDifferentMeasurementErrors[J].ActaElectronicaSinica,2009, 37(6):1296-1299.
[13]吴振辉,董朝阳.主/被动雷达H∞滤波的最小方差数据融合算法[J].系统仿真学报,2006,18(10):769-772.
WUZhen-hui,DONGChao-yang.MinimumMeanVarianceDataFusionAlgorithmUsingH∞FilterBasedonActive/PassiveRadar[J].JournalofSystemSimulation,2006, 18(10):769-772.
[14]芦建辉,陈东锋,万朝江,等.主被动传感器实时信息融合的STMHM算法[J].电子学报,2012,40(9):1740-1745.
LUJian-hui,CHENDong-feng,WANChao-jiang,etal.STMHMAlgorithmofActiveandPassiveSensorsReal-TimeDataFusion[J].ActaElectronicaSinica,2012, 40(9):1740-1745.
[15]单甘霖,张子宁.面向目标跟踪的单平台主被动传感器长期调度[J].系统工程与电子技术,2014,36(3):458-463.SHANGan-lin,ZHANGZi-ning.Non-MyopicSensorSchedulinginaSinglePlatformforTargetTracking[J].SystemsEngineeringandElectronics,2014, 36(3):458-463.
Optimal Target Location with Active and Passive Sensors
SHENG Dan,WANG Guo-hong,SUN Dian-xing,YANG Zhong
(Naval Aeronautical Engineering Institute,Institute of Information Fusion, Shangdong Yantai 264001, China)
Abstract:Aiming at desynchrony of the time and space and the nonlinearity of the measurements, a space-time-fusion tracking (STFM) model is established to improve the tracking precision. With the Newton interpolation, the measurements in different time and space can be synchronic. Then several methods of target position estimation are compared, and based on the best a filtering algorithm of the model is established. Lastly, on the background of uniform linear motion and maneuvering targets, the effect of the STFM is verified and the corresponding conclusion has some theoretical and practical significance in information utilization of active and passive sensors and precision improving.
Key words:active passive sensor; newton interpolation; synchrony; fusion; target tracking; particle filtering
*收稿日期:2015-08-10;修回日期:2015-09-21
基金项目:国家自然科学基金(61179018, 61002006);“泰山学者”建设工程专项经费资助课题
作者简介:盛丹(1983-),女,山东烟台人。博士生,主要研究方向为无源定位、目标跟踪。
通信地址:264001山东省烟台市芝罘区二马路188号航院信息融合研究所E-mail:2855221900@qq.com
doi:10.3969/j.issn.1009-086x.2016.03.019
中图分类号:TN958.93;TP212;TP391.9
文献标志码:A
文章编号:1009-086X(2016)-03-0116-05
