基于粒子滤波改进的VTS微弱目标检测前跟踪算法*
2016-07-12崔威威黄孝鹏匡华星
崔威威,黄孝鹏,2,姚 远,匡华星
(1.中船重工第七二四研究所,南京 211153;2.海军装备研究院博士后科研工作站,北京 100161)
基于粒子滤波改进的VTS微弱目标检测前跟踪算法*
崔威威1,黄孝鹏1,2,姚远1,匡华星1
(1.中船重工第七二四研究所,南京211153;2.海军装备研究院博士后科研工作站,北京100161)
摘要:舰船交通服务系统是民用雷达的信息集成系统,探测微弱目标存在RCS小、回波弱、杂波强等问题,导致信噪比低,难以实现有效检测跟踪。基于粒子滤波的检测前跟踪技术对低信噪比下微弱目标信息积累和探测有良好效果。通过采集单设备实测数据,构建遗忘因子和收敛因子以增加重采样的效率,引入虚拟采样保持粒子的多样性,提升粒子滤波对微弱目标的探测能力。仿真试验表明,改进后的算法可实现舰船交通服务系统对微弱目标的有效探测,并能获得较精准的目标状态估计值。
关键词:舰船交通服务系统,微弱目标,粒子滤波,检测前跟踪
0 引言
舰船交通服务(Vessel Traffic Services,VTS)系统是民用雷达的信息集成系统,在水面交通运输监视管理、海岸警戒防御、港务安全管理有着广泛应用。浮标、无人机、隐身飞行器、小型渔船等微弱目标的探测技术是VTS系统的重要研究内容,系统探测微弱目标时受地形、气象水文变化影响,面临着非线性、非高斯、非稳态,目标密集度高,RCS特征复杂等挑战,存在视频回波信噪比低、强杂波条件下目标探测能力下降等问题。
传统检测后跟踪(Track After Detection,TAD)算法在低信噪比情况下通常存在虚警率高,点航迹关联算法复杂度增长现象,无法实现对微弱目标的有效探测[1 - 2]。检测前跟踪(Track Before Detection,TBD)算法直接使用传感器原始数据,能够满足VTS微弱目标探测信息处理需求。目前,TBD理论和技术研究成果的积累,DSP、FPGA和PPC等高速信号处理器件的发展,以及磁盘阵列存储能力的提升,有效支撑了TBD在VTS系统对微弱目标探测能力提升。
粒子滤波(Particle Filter,PF)基于蒙特卡罗随机采样理论,适合非线性、非高斯随机系统,并具备易实现、目标状态估计精度高等优点,是实现TBD的主要技术途径之一。其核心是从状态空间中获取一定数量的随机样本,当样本数量足够大时,粒子滤波能够无限逼近目标状态分布的真实概率密度,获取目标状态最优估计。该方法已有大量理论和实践成果[2-4]。
为解决基于PF实现的TBD算法应用中存在随机因影响素粒子权重,重采样没有考虑粒子状态收敛、粒子匮乏等问题,本文拟利用单设备采集的实测数据,构建遗忘因子和收敛因子提升重采样的效率,引入虚拟采样保持粒子的多样性,实现对微弱目标的有效探测。
1 粒子滤波的状态转移、运动模型、观测模型
Salmond在2001年首次提出基于粒子滤波的标准检测前跟踪算法(PF-TBD)[5],将目标是否存在加入到粒子状态,结合状态转移矩阵、观测模型,奠定了后续研究基础[6-10,14-16]。
定义变量Ek,En=1、En=0分别表示k时刻目标出现、消失,目标存在的状态转移被建模为二元马尔科夫链,转移矩阵如下定义:
其中Pd、Pb分别表示目标出生、死亡的概率;当粒子进入或走出雷达监视区域,将粒子的状态设置为出生或死亡[5]。
在一定信噪比条件下,使用观测模型描述观测数据传递关系。假定在距离、多普勒和方位上分别存在Nr、Nd、Nb个单元,对于每个分辨单元(i,j,l),观测值zni,j,l按照下式估计:

其中上式表示目标存在,下式表示目标不存在;Sn表示目标的粒子状态,vni,j,l表示服从零均值、方差为σ2的独立同分布瑞利背景噪声,hijA(Sn)表示分辨单元受粒子Sn的影响程度:

式中R、D、B是与距离分辨率、多普勒分辨率和方位分辨率相关的常数,Lr、Ld、Lb是传输损失系数,rn、dn、bn可由粒子状态向量线性部分计算得出:

假设背景噪声服从高斯分布,那么单个像素目标在和不存在时观测值似然函数分别按照下式定义:

2 基于粒子滤波改进的微弱目标检测前跟踪算法
Rutten在Salmond、Boers[4]等人的研究基础上,于2004年提出了优效粒子滤波检测前跟踪(EPF-TBD)[7],将目标是否出现和目标状态估计分离,使所有粒子都用于估计目标状态;在其后续研究中,并指出EPF-TBD在滤波性能和效率方面均优于Salmond的PF-TBD算法[8-9]。
结合Kalman滤波完成粒子状态更新,实验分析了EPF-TBD粒子初始化、采样、权重计算和重采样等各要素对粒子滤波效率性能的影响,特别针对原重采样算法仅利用归一化后的权重,没有考虑单个粒子滤波收敛速度精度、随机因素影响。基于粒子的收敛速度和精度可以滤波次数估计[11]以及遗忘因子能降低随机性因素影响[12],构建收敛因子、遗忘因子来改善粒子滤波的重采样效率,提高积累的检测似然比和跟踪精度。
本文引入遗忘因子降低随机因素造成计算似然比波动现象,通过单步Markov加权计算得到n时刻目标的第i个粒子当前似然比检测值[12]:


当w0=0.8、w1=8时,表示目标出现的过程;w0=8、w1=0.8时表示目标消失过程。计算可知ρ'最大取值0.673 6,对应ρ取值2.063 5,能保证检测不延迟3个周期。
马平认为[11]目标误差估计可以按照下式进行估计:

其中:

对于慢速目标,状态转移矩阵Fn近似一个常数矩阵,本文以雷达天线周期T作为近似值:

由于观测噪声协方差矩阵Ri是一个区间数矩阵,对于一个有限次数的滤波过程,存在一个矩阵满足,代入上式得到:

P0和初始化时粒子采样的距离方位、雷达的观测精度有关,协方差矩阵P-10及其特征值在迭代计算的过程中难以跟踪分析;收敛因子应当只和当前粒子生存周期n、参数ε相关,本文按照下式定义收敛因子:

本文选取ε=1,重采样时粒子的收敛因子和归一化后权重相乘,将再次归一化的结果作为重采样的依据,提高重采样的效率。
针对重采样因复制权重高的粒子导致粒子匮乏,提出了虚拟采样保持粒子多样性。在重采样时,记录被重采样的粒子存储位置作为索引信息,重采样结束后在没有被索引的存储位置初始化新生粒子,并将新生粒子的位置添加到索引信息,进而避免了粒子复制,保持粒子多样性,其过程如图1、图2所示。

图1 初始化索引
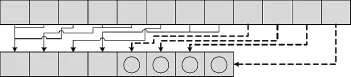
图2 重采样时更新索引空间
其中第1行矩形表示索引空间,第2行矩形为对应的粒子存储空间;内部包含圆环的存储位置表示新生粒子;虚线箭头表示新增加的索引,指向新生粒子。
3 仿真分析
本文采集当长江河道存在遮挡时VTS监视大桥站Altlas雷达的30个周期视频,分析EPF改进算法对微弱目标的检测和跟踪性能。
定义信噪比值为:

其中P是目标幅度值,PB表示背景噪声均值,σ是背景噪声方差根。本文选取的雷达视频信噪比的值实时发生变化。

图3 目标初始位置

图4 第30个周期的位置

图5 目标背景相对幅度值

图6 VTS视频信噪比
图3和图4表示目标初始运动的位置和第30个周期位置,其中x轴表示方位(分辨率0.15°),y轴表示距离(分辨率7.5 m);图5和图6表示视频内目标的信噪比在1.6左右。
考虑到VTS面临目标密度高、目标自主行驶、目标速度较慢等复杂实际运动情况,不易实现全程全方位目标检测,本文在河道内选取一块区域进行目标检测,在目标中心位置2.4°、60 m空间范围和[-2.5,2.5]速度范围内均匀初始化粒子状态,设置160个粒子,并选取河道内一块船只较少的区域统计背景噪声均值和方差根。
选取积累信噪比(重采样后粒子检测似然比均值)和跟踪精度作为算法主要评价指标,分别统计20次传统EPF-TBD、改进后的EPF-TBD算法的指标均值进行比较,如图7~图9所示。

图7 积累似然比值

图8 方位误差

图9 距离误差

图10 跟踪效果
由图7可知,传统EPF-TBD算法积累似然比值在2附近波动较大,积累效果不明显。算法改进后历经15个周期似然比值在6附近波动,能稳定判断目标存在。由图8和图9可知,传统EPF-TBD算法的方位、x-y坐标距离精度在1°、25 m波动。算法改进后的跟踪精度随着积累逐步提升,历经15个周期,方位、x-y坐标距离精度分别在0.4°、12 m波动。图10显示经对比分析,改进算法后,微弱目标检测能力得到明显提升。
4 结论
为提升对微弱目标的探测能力,本文通过构建收敛因子、遗忘因子、虚拟采样对传统算法进行改进,并利用实测数据验证了改进算法对低信噪比下微弱目标探测效果明显。由于强杂波环境或者交叉、追越、并行等复杂运动状态下微弱目标的探测更为复杂,该算法的有效性有待进一步研究,同时其在动平台、多平台协同条件下对微弱目标的探测能力提升也有待深入探究。
参考文献:
[1]樊玲.微弱目标检测前跟踪[D].成都:电子科技大学,2014.
[2]龚亚信.基于粒子滤波的微弱目标检测前跟踪算法研究[D].长沙:国防科技大学,2009.
[3]SALMOND D J. Mixture reduction algorithms for point and extended object tracking in clutter[J]. IEEE Transactions on Aerospace and Electronic Systems,2009,5(2):667-685.
[4]BOERS Y,DRIESSEN H. Particle filter based track before detect algorithms[C]//Proceeding of SPIE 2003,Signal and Data Processing of Small Targets,2003:128-137.
[5]SALMOND D J,BIRCH H. A particle filter for track-before-detect[C]//Proceedings of the American Control Conference. Washington,USA,2001:3755-3760.
[6]BOERS Y,SALMOND D. Target tracking:algorithms and applications[J]. IEEE Proceedings Radar,Sonar and Navigation,2005,152(5):289-290.
[7]RUTTEN M G,GORDON N J,MASKELL S. Particle-based track-before-detect in Rayleigh noise[C]//Proceedings of SPIE- Signal and Data Processing of Small Targets 2004,Orlando,FL,United States,2004:509-519.
[8]DAVEY S J,RUTTEN M G,B CHEUNG. A comparison of detection performance for several track-before-detect algorithms[J]. Eurasip Journal on Advances in Signal Processing,2007:22-37.
[9]DAVEY S J,RUTTEN M G. A comparison of three algorithms for tracking dim targets[C]//Proceedings of the Information,Decision and Control,2007:342-347.
[10]SALMOND D J. Mixture Reduction Algorithms for Point and Extended Object Tracking in Clutter[J]. IEEE Transactions on Aerospace and Electronic Systems,2009,45(2):667-685.
[11]马平.卡尔曼算法的滤波速度[J].山东师大学报(自然科学版),1997,12(3):127-132.
[12]田俊林,付承毓,唐涛,等.过程噪声方差实时补偿的非定轨目标跟踪[J].光电工程,2012(1):68-73.
[13]BOERS Y,DRIESSEN J N. A track before detect approach for extended objects[C]//Information Fusion,2006 9th International Conference on Digital Object Identifier,2006:1-7.
[14]DAVEY S J. Histogram PMHT with particles[C]//Proceedings of the 14th International Conference on Information Fusion Chicago,USA:ISIF,2011:779-786.
[15]HABTEMARIAM B K,THARMARASA R,KIRUBARAJAN T. Multi-target track before detect with MIMO radars
[C]//Proceedings of the IEEE Aerospace Conference,Big Sky,Montana,USA:IEEE,2010:1-9.
[16]朱瑞奇,齐乃新,张胜修,等.一种基于粒子滤波的改进红外目标跟踪算法[J].四川兵工学报,2014,25(3):133-136.
[17]梁新华,潘泉,杨峰,等.基于两级采样的粒子滤波检测前跟踪算法[J].系统工程与电子技术,2011,33(9):1921-1926.
An Improved PF- TBD Algorithm for VTS System Dim Objects Detection
CUI Wei-wei1,HUANG Xiao-peng1,2,YAO Yuan1,KUANG Hua-xing1
(1.No.724 Research Institute of CSIC,Nanjing 211153,China;2.Postdoctoral Research Station,Naval Academy of Armament,Beijing 100161,China)
Abstract:VTS(Vessel Traffic Services)system is a very important civil Radar surveillance furnishment,which is challenged by various problem especially when monitoring objects with small RCS in a low SNR or strong noise scene;Track before detection(TBD)algorithm based upon Particle filter (PF)takes advantage for its adaption in solving non-linear,non-Gaussian or unsteady state problems,especially when detecting and tracking dim object in a low SNR scene. In this paper synthetic sample strategy,fading factor and convergence factor are integrated to improve sampling performance and keep diversity of the particle. Analysis and experiment proves that this promoted algorithm can detect and track faint target in VTS radar video and approximate target’s status more precisely compared with original EPF-TBD algorithm at cost of a few more computing burden.
Key words:vessel traffic services system,dim target,particle filter,track before detection
中图分类号:TP391
文献标识码:A
文章编号:1002-0640(2016)05-0141-04
收稿日期:2015-03-05修回日期:2015-04-07
*基金项目:船舶工业国防科技预研基金资助项目(13J3⋆⋆⋆)
作者简介:崔威威(1987-),男,河南开封人,硕士,工程师。研究方向:雷达数据处理。
