基于粒子滤波的动态自回归预测模型方法
2016-07-04张海兵
张海兵
(昆明船舶设备研究试验中心 第5室,云南 昆明 650051)
基于粒子滤波的动态自回归预测模型方法
张海兵
(昆明船舶设备研究试验中心 第5室,云南 昆明 650051)
摘要针对自回归模型以固定历史观测序列建模,模型不能随时间序列新的观测值实时更新,导致预测中对序列趋势变化适应性差,预测精度低的问题,提出以粒子滤波动态优化调整自回归模型的方法,通过对模型参数蒙特卡洛采样得到粒子,以粒子描述模型状态变量的演变,采用递推贝叶斯方法估计粒子权重,由粒子及其权重近似模型参数的后验滤波值,从而随观测序列的动态获得不断更新模型参数,提高了模型预测结果的精确性,并能给出预测结果的置信区间。最后以NASA艾姆斯中心锂离子电池试验数据为例,验证了该方法的有效性。
关键词时间序列;自回归模型;粒子滤波;动态更新
时间序列预测是指根据事物过去已知的状态观测值,构建事物发展的规律模型,以此推测事物的未来状态。自回归(AR)模型完全基于时间序列自身,以自身历史数据的变化来预测自身未来的发展,具有模型输入少、简单方便等特点,被广泛应用于时间序列预测建模[1-2]。然而AR模型以固定历史观测序列建模,模型在预测过程不发生改变,是一种定常模型,但时间序列通常是动态发展和演化的,这种模型的固定性和数据的动态发展性导致AR模型外推预测精度随预测步数的增加降低。虽然AR模型可利用包括新的观测值在内的现有全部观测序列重新建模,但重复工作量大,计算代价昂贵,突出表现在长周期时间序列预测中。文献[3]分析了AR模型参数估计的时变性与预测模型的定常性之间的矛盾,提出基于卡尔曼滤波的AR模型方法以实时更新其参数估值。文献[4]构建了机场道路使用性能的自回归移动平均模型,并以卡尔曼滤波实现模型的动态更新,提高了预测精度。然而卡尔曼滤波要求模型线性、噪声高斯分布假设等,在实际应用中受到了限制[5]。为此,本文提出基于粒子滤波的动态AR模型预测方法,利用粒子滤波的递推更新思想,随着观测值的不断获得对AR模型参数进行贝叶斯后验滤波估计,以此最优估计值更新AR模型并外推生成预测数据,达到AR模型对动态观测序列的实时跟踪,提高模型预测的精确性,并且该方法具有适用范围广、计算简单易实现等优点。
1时间序列自回归建模
时间序列y的自回归模型可表示为
yt=θ1yt-1+θ1yt-2+…+θpyt-p+εt
(1)
其中,p为模型阶数;θ为模型参数;εt为模型残差,εt~N(0,σ2)。若已知模型阶数p和参数Θ=[θ1,θ2,…,θp],则将历史观测值Y=[yt-1,yt-2,…,yt-p]代入模型外推即可得到t时刻的预测值yt。因此,时间序列自回归建模包括模型定阶和模型参数求解两方面内容。
1.1模型定阶
AR模型阶数太小会导致模型不能充分反映时间序列的统计规律;阶数过大不仅会降低参数估计的计算速度,且易产生过拟合,降低模型推广能力。BIC定阶准则由日本学者Akaike和E.J.Haman提出,以最小信息为测度,并考虑了样本数对模型平滑性的影响[6],其描述如下
(2)

1.2模型参数求解
AR模型参数求解的方法主要有相关矩估计、最大似然估计、最小二乘估计等。最小二乘法求解简单可靠,其原理如下:由式(1)可知,p阶自回归模型的误差方程为
εt=θ1yt-1+θ2yt-2+…+θpyt-p-yt
(3)
(4)
由该误差方程组可求得 的最小二乘解为
(5)

由上述AR建模过程可知,模型参数由一段固定历史观测序列根据一定的准则确定,反映的是历史观测值的最优时间依存规律。当时间序列观测值不断动态获得,就需要预测模型也能随观测值实时更新,否则以旧的预测模型对序列新观测值进行预测,精度必然会有所损失。
2粒子滤波原理
系统的状态方程和观测方程可表示为[7]
xk=fk(xk-1,wk)
(6)
yk=hk(xk,uk)
(7)
其中,xk为系统在k时刻的状态变量;yk为xk的观测值;wk为系统噪声;uk为观测噪声;f(·)和h(·)为已知函数。
对上述状态方程和观测方程作统计描述,可分别得到系统的状态转移概率密度p(xk/xk-1)和观测似然概率密度p(yk/xk)。
若已知系统状态的初始概率密度函数p(x0),则状态递推概率密度可表示为

(8)
状态更新概率密度为
(9)
上述预测和更新方程描述了递推贝叶斯估计的过程,即从k-1时刻得到的后验概率密度p(xk-1/y1:k-1)出发,利用状态模型来递推k时刻xk的先验概率密度p(xk/y1:k-1),当获得k时刻的最新观测值yk,修正先验概率密度,从而得到k时刻的后验概率密度p(xk/y1:k)。粒子滤波运用蒙特卡洛仿真,采用重要性采样的方法,以粒子及其权重的形式近似得到上述状态方程的解[8]。
设g(xk)为状态变量xk的任意函数,q(xk/y1:k)为后验概率密度p(xk/y1:k)的重要性抽样参考分布,则g(xk)的数学期望为
(10)

(11)
最简单易于实现的重要性概率密度函数是使之等于先验概率密度,但概率密度函数重要性采样中粒子经过多次迭代后,会出现退化的现象,需对其做重采样,以增加粒子的多样性。常用重采样方法有多项式重采样、残差重采样、系统重采样等[9]。
3基于粒子滤波的动态自回归模型方法
对于一时间序列,运用第1节方法建立AR模型,此AR模型为时间递推方程,作为粒子滤波方法的状态方程。引入时间序列值的观测噪声,构建粒子滤波观测方程。


(12)
(5)计算参数粒子的均值作为AR模型参数的最优值,利用该优化后的AR模型对t+1时刻的状态值做外推预测;
(6)当获得t+1时刻的观测值,重复步骤(2)~(5),对AR模型进一步做优化更新。
4实例分析
以NASA艾姆斯中心B6号锂离子电池实验数据为例,采用AR模型和本文提出的基于粒子滤波的动态AR模型方法分别对其作剩余寿命预测。其中B6号电池型号为18650Li-ion battery,额定容量2 Ah,在室温下反复充放电次数与实测容量关系如图1所示。设当锂离子电池容量退化至额定容量的70%时视为失效,则从锂离子电池的当前容量值到失效阀值(1.4 Ah)之间的充放电循环次数为锂离子电池的剩余寿命[10-11]。
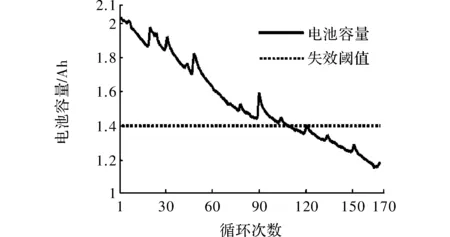
图1 锂离子电池充放电次数与电池容量关系
由图1可知,锂离子电池容量观测数据具有明显的递减趋势,是非平稳时间序列,对其进行平稳化处理,一次差分后结果表明平稳,对该平稳时间序列AR建模,取前80个观测序列值作为模型训练数据,以BIC准则确定模型阶数得如图2所示曲线,由图可知当P=7时BIC指标值最小,因此将该时间序列的AR模型定为7阶,采用最小二乘法计算得7阶AR模型的各参数值为[0.24,0.11,0.11,0.31,0.01,0.05,0.14]。
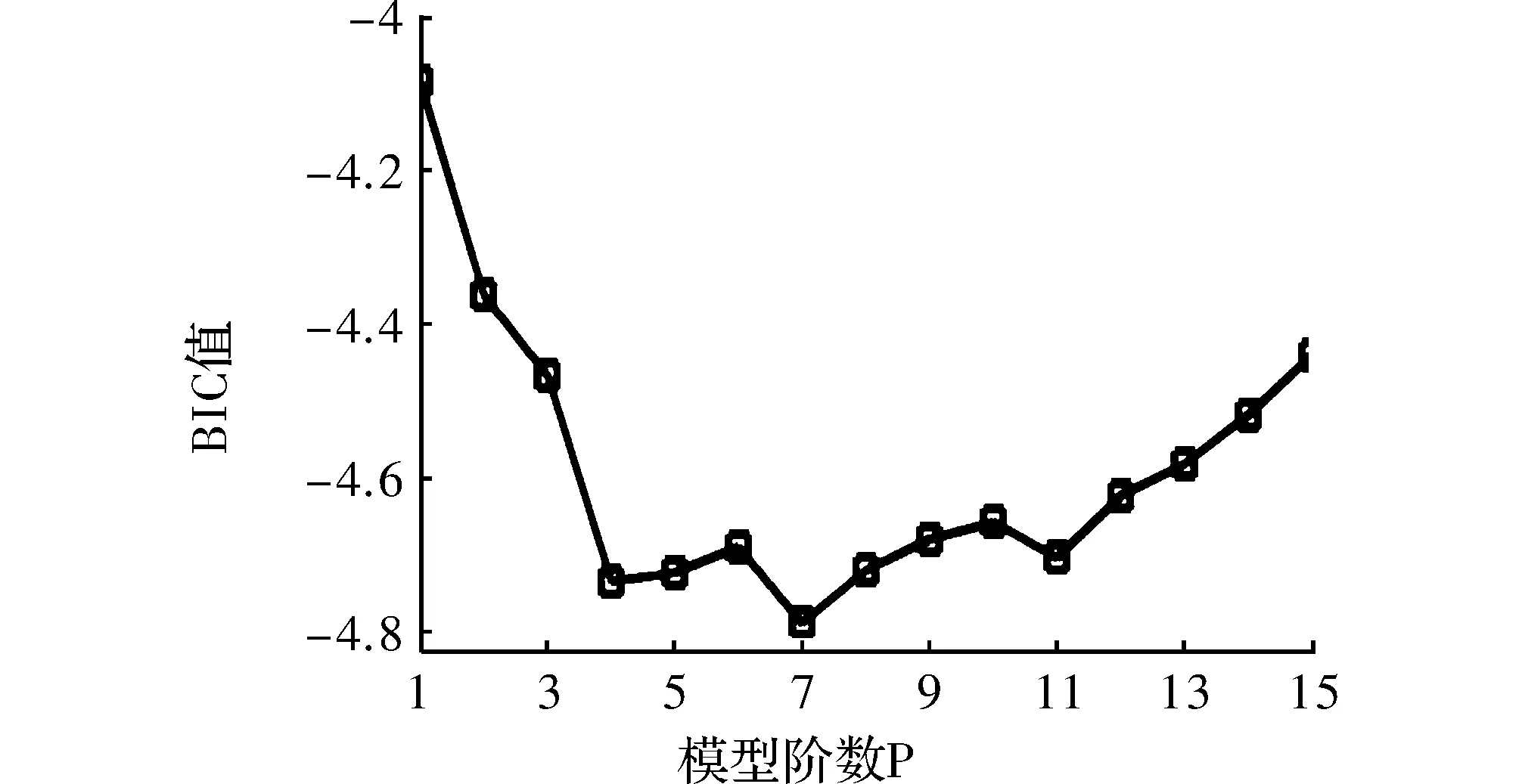
图2 BIC准则定阶结果
以建立好的AR模型对后续的60个值做单步预测,结果如图3所示。计算得AR模型在失效阈值处的寿命预测误差为12次。
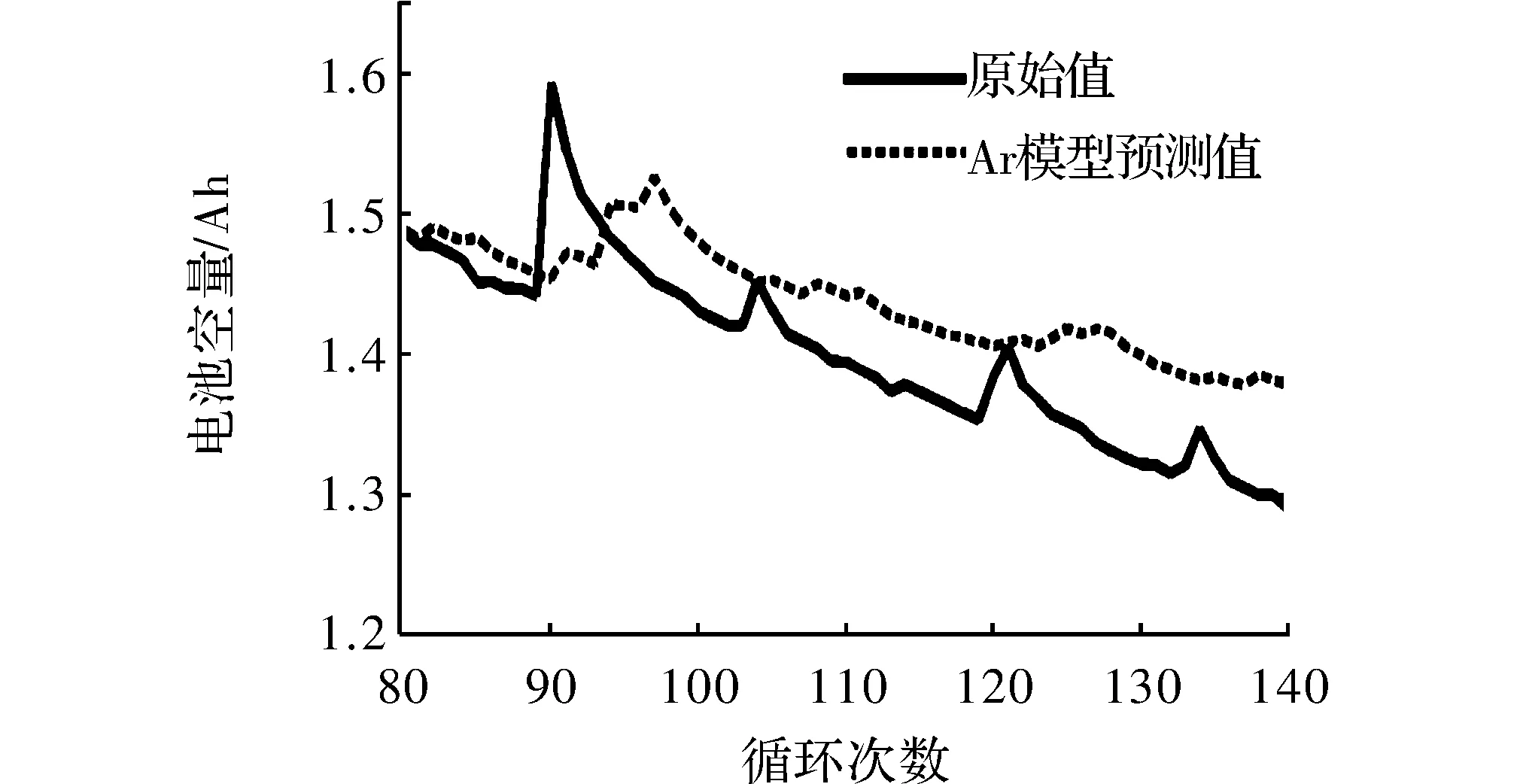
图3 AR模型预测结果

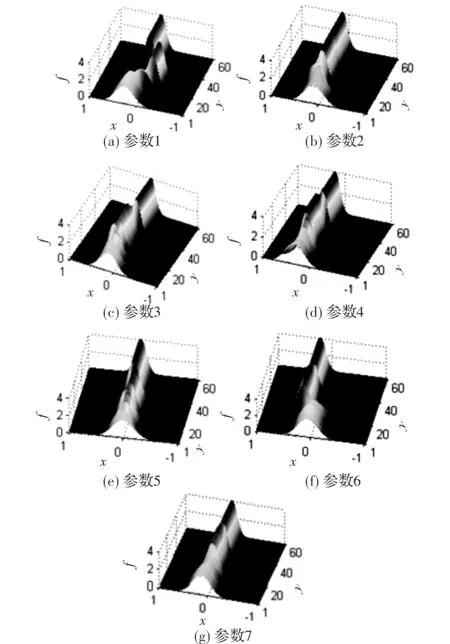
图4 AR模型各参数粒子的核密度更新过程
取参数粒子的均值作为该参数的最优估计,以优化后的AR模型对下一循环电池容量进行预测,结果如图5所示。由图可知,粒子滤波动态更新后的AR模型预测精度显著提高,在失效阈值处的预测误差仅为1次。进一步可根据参数粒子的概率分布计算得电池容量预测结果的90%置信区间。
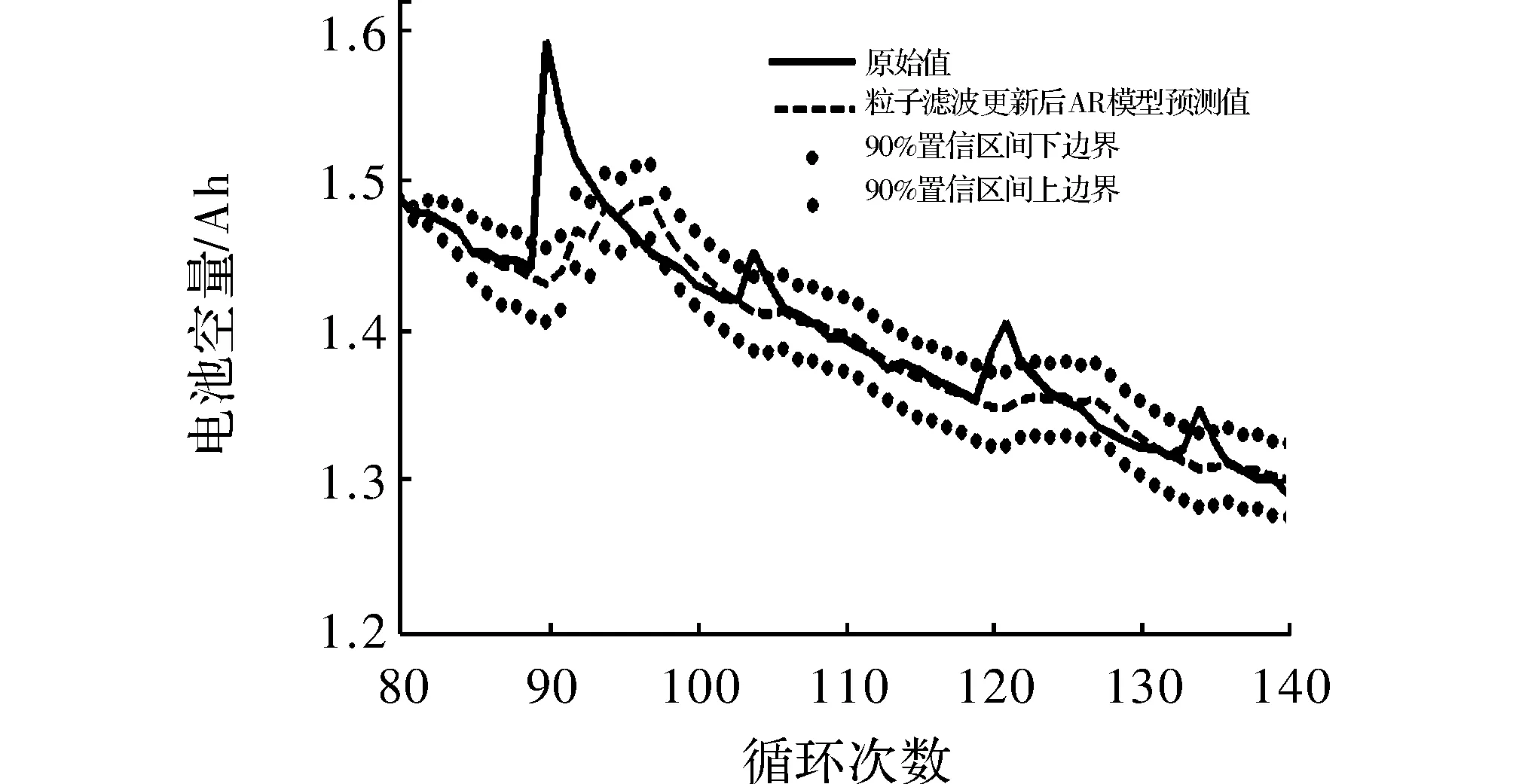
图5 粒子滤波更新后AR模型预测结果
5结束语
提出了一种基于粒子滤波的AR模型预测方法,可随着观测值的动态获得不断更新模型参数,从而做到观测信息的全面利用,提高模型对时间序列动态发展的适应性和预测的精确性,并且该方法还可以给出预测结果的置信区间,为预测结果的评价提供了依据。以NASA艾姆斯中心锂离子电池剩余寿命预测为例,验证了本文方法相对于经典AR模型具有预测结果误差小,预测结果可评价等优点。
参考文献
[1]徐峰,王志芳,王宝圣.AR模型应用于振动信号趋势预测的研究[J].清华大学学报:自然科学版,1999,39(4):57-59.
[2]胡劲松,杨世锡.EMD方法基于AR模型预测的数据延拓与应用[J].振动、测试与诊断,2007,27(2):116-120.
[3]张显云,张勤,王利,等.基于卡尔曼滤波的AR模型及应用[J].测绘通报,2009(11):41-43.
[4]袁捷,唐龙,杜浩.机场道面使用性能的动态自回归预测模型[J].同济大学学报:自然科学版,2015,43(3):399-404.
[5]张萌,陈恳,李娜,等.卡尔曼滤波与粒子滤波之间跟踪模式的优化[J].计算机工程与应用,2012,48(36):129-133.
[6]Jonathan D Cryer, Kung-Sik Chan.时间序列分析及应用[M].2版.潘红宇,译.北京:机械工业出版社,2011.
[7]Georges O,Anne P,Jean D R,et al.The particle filters and their applications[J].Chemometrics and Intelligent Laboratory Systems, 2008,91(1):87-93.
[8]Kemp F. An introduction to sequential monte carlo methods[J].Journal of the Royal Statistical Society, 2003,52(4):694-695.
[9]Hol J D.Resampling in particle filters, Internship report[J].Institutionen For Systemteknik,2004 (614):307.
[10]刘大同,周建宝,郭力萌,等.锂离子电池健康评估和寿命预测综述[J].仪器仪表学报,2015,36(1):1-16.
[11]艾力,房红征,于功敬,等.基于数据驱动的卫星锂离子电池寿命预测方法[J].计算机测量与控制,2015,23(4):1262-1265,1272.
Dynamic Auto-regression Prediction Model Based on Particle Filter
ZHANG Haibing
(Fifth Room,Kunming Marine Equipment Test Research Center, Kunming 650051, China)
AbstractAs to the problem of auto-regressive model built on fixed time series and cannot update with the new value, which result in the poor trend adaptability and low prediction precision, a dynamic model parameter optimization method based on the particle filter is proposed. Firstly, particles are sampled from model parameters to describe the state variables. Further, the weights of particles are calculated using Recursive Bayes estimation method, therefore the posterior filtered estimations can be represented by particles and their weights, and then use them to update the AR model along with the new observe value achieve. The proposed method can improve the predict result accuracy of AR model and give the confidence interval of predict result as well. In the end of the article, effectiveness of the method is verified by lithium-ion battery data tested in NASA’s Ames Research Center.
Keywordstime series; auto-regression model; particle filter; dynamic update
收稿日期:2015-10-23
作者简介:张海兵(1989-),男,硕士,助理工程师。研究方向:动力装备状态监测与故障诊断。
doi:10.16180/j.cnki.issn1007-7820.2016.06.005
中图分类号TP301.6
文献标识码A
文章编号1007-7820(2016)06-015-04