基于GT-drive的整车控制策略研究*
2016-07-01王志红杜长清杨慧萍
王志红 张 飞 杜长清 杨慧萍 刘 云
(武汉理工大学现代汽车零部件技术湖北省重点实验室 汽车零部件技术湖北省协同创新中心1) 武汉 430000) (郑州日产汽车有限公司2) 郑州 450000)
基于GT-drive的整车控制策略研究*
王志红1,2)张飞1)杜长清1)杨慧萍1)刘云1)
(武汉理工大学现代汽车零部件技术湖北省重点实验室汽车零部件技术湖北省协同创新中心1)武汉430000) (郑州日产汽车有限公司2)郑州450000)
摘要:将国内某款乘用车改装成插电式混合动力汽车(PHEV),对其中整车控制策略进行研究设计.根据不同工况控制需求,设计出整车唤醒、动力控制、制动能量回收等策略.应用仿真软件GT-drive进行仿真分析.结果表明,设计的控制策略满足车辆设计指标,以电为主的控制策略下油耗为3.92 L·(100 km)-1,相比较原车型节油48.5%.同时在FTP75工况模拟运行中,很好的实现能量在发动机和电机之间的分配.
关键词:插电式混合动力汽车;整车控制策略;GT-drive
0引言
为应对汽车燃料消耗快速增长及由此引起的能源和环境问题,我国发布了乘用车燃料消耗量第四阶段标准,针对2020年我国乘用车产品平均燃料消耗量达到5 L·(100 km)-1的目标,国内各大汽车整车厂纷纷将眼光投向新能源汽车领域.
作为插电式混合汽车控制系统中重要一部分,整车控制决定了该混合动力汽车的性能.由于PHEV存在两种以上的动力源和多种工作模式,且它们之间又存在复杂的耦合模式,所以必须根据不同的工况对电机和发动机进行合理的能量分配,以达到车辆最佳的动力性能、燃油经济性和排放性能PHEV整车结构[1-2].
1PHEV整车构成
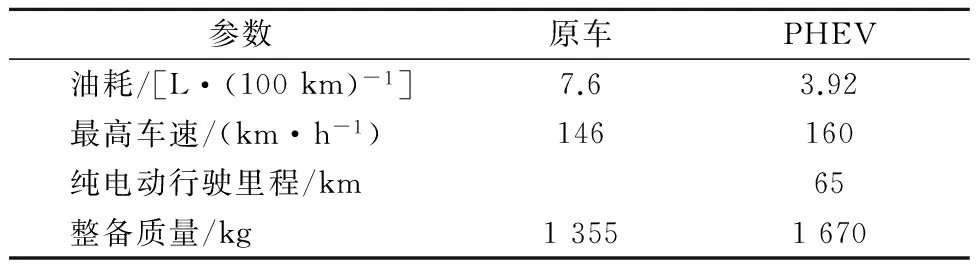
所研究的PHEV是在原有车型的平台上,对其动力系统进行改装.现有结构保留了原先发动机,将五档变速器改为CVT无级变速器,改善驾驶员的操纵方便性和乘员的乘坐舒适性.同时增加牵引电机和辅助电机以及动力电池.在电机的选择上,选用开关磁阻电机,具有启动转矩大,启动电流低、适用于频繁启停及正反向转换运行等工况,整车主要参数见表1.
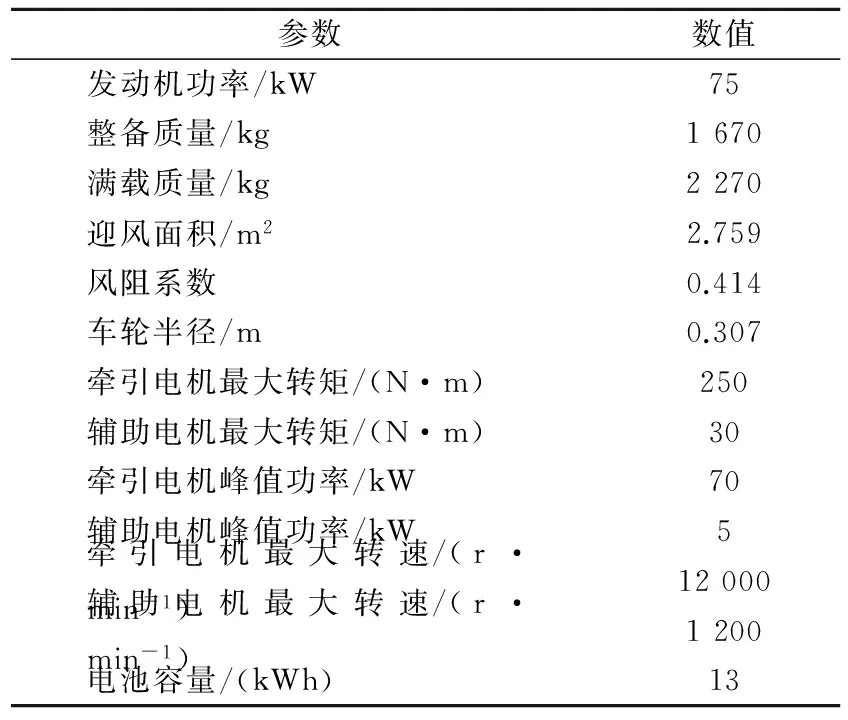
表1 PHEV主要参数
在混合动力系统结构布置方面,PHEV采用并联式混合动力系统,发动机和动力电池作为独立动力源可同时车辆提供动力.整车控制器位于整车架构的顶层,负责接受其他控制器及电器的信号,并对这些信号做出处理,通过计算得出结论,利用CAN总线将这些指令传送给相应的电器模块,然后其他控制器或者电器根据得到的命令进行相应的动作,以此来实现整车的驱动控制、能量管理控制、安全管理控制等功能[3].整车动力系统结见图1.
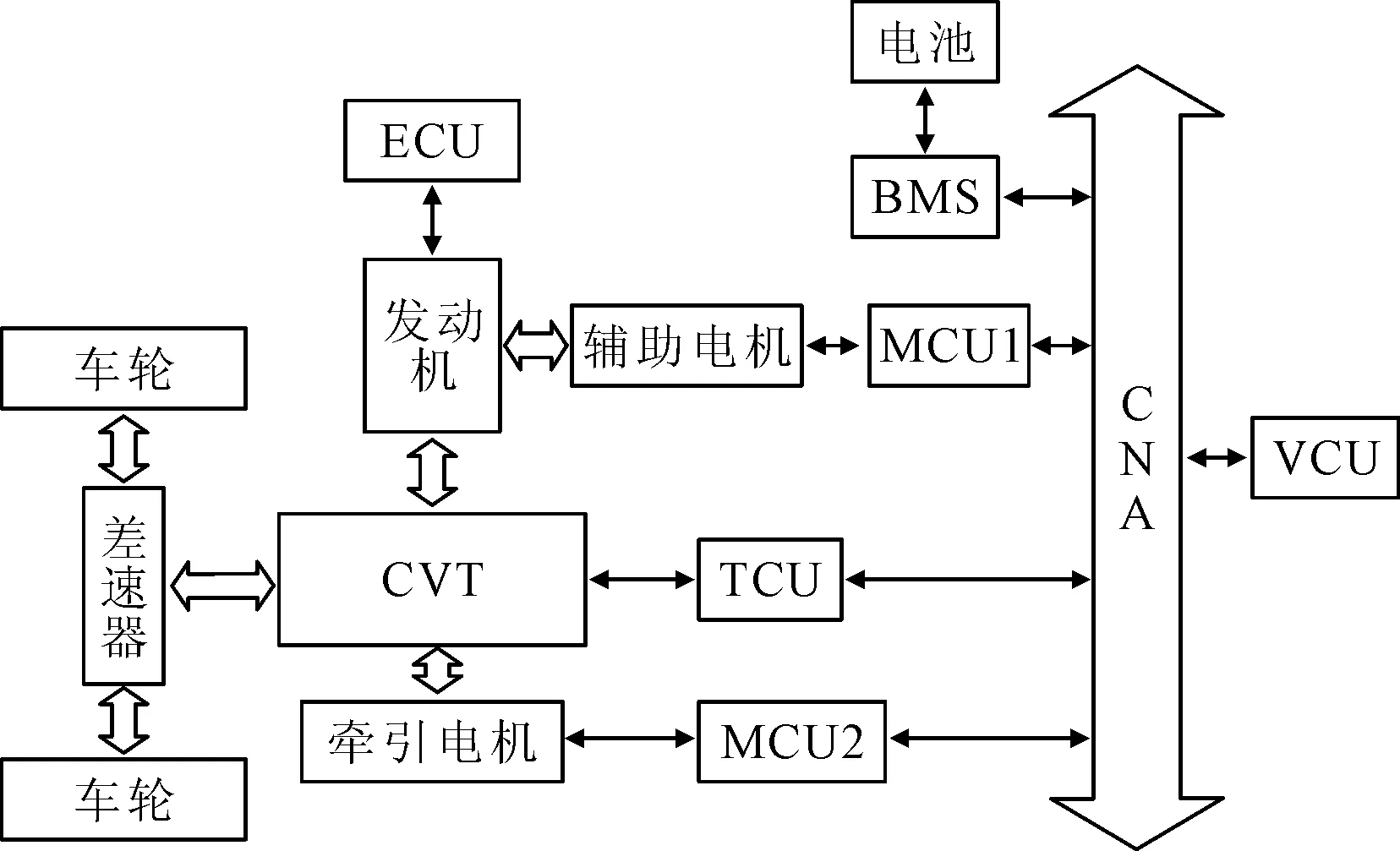
图1 整车动力系统结构图
整车控制器位于整车架构的顶层,负责接受其他控制器及电器的信号,并对这些信号做出处理,通过计算得出结论,利用CAN 总线将这些指令传送给相应的电器模块,然后其他控制器或者电器根据得到的命令进行相应的动作,以此来实现整车的驱动控制、能量管理控制、安全管理控制等功能.
2整车控制策略
合理的整车控制策略,是混合动力汽车获得良好的燃油经济性、动力性和舒适平稳的驾驶性的前提[4].它需要决定进入某个激活的车辆状态(OFF,行车模式、充电模式等),并且根据输入触发条件切换到另一个车辆状态,同时也需要根据车辆不同的需求,在发动机和电机之间合理的分配转矩.
2.1整车系统唤醒控制策略
2.1.1停车充电唤醒控制策略
插电式混合动力系统与传统汽车相比除了增加一个动力源,还具备停车外插充电功能.因此插电式混合动力系统整车唤醒功能除了通过钥匙激活以外,还需考虑通过充电枪激活整车系统.
由图2可知,车辆处于停车静止,此时进行停车充电.当检测到充电枪插入信号时,12 V的弱电会给整车系统上电,充电机、VMS等进行自检,检查系统是否能够正常进行充电,当自检通过时,VMS则会发送“激活高压”指令,当高压激活完成,充电机进行充电.当自检未通过,系统会检测故障并进行判断定级,最终在仪表板上显示.
2.1.2行车模式唤醒控制策略
行走模式唤醒控制策略流程图见图3.
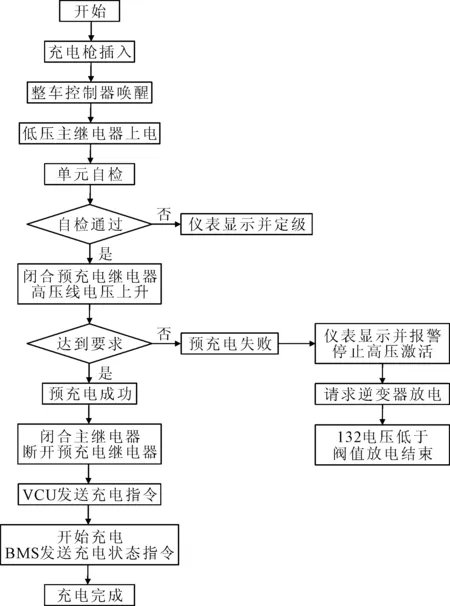
图2 停车充电唤醒控制策略流程图
由图3可知,本文中钥匙有4个位置:LOCK,ACC,ON,START.当钥匙处于ACC时,辅助电器上电(收音机、真空泵等);当钥匙处于ON时,空调、仪表、冷却风扇、水泵等器件上电,并开始自检,为高压激活做准备.高压激活分为两个步骤,首先进行预充电,在预充电过程中会对高压总线电压及其他参数进行实时检测,当检测未通过时,终止预充电;当钥匙处于START时,如果整车准备好(预充电完成),VCU将闭合主继电器,断开预充电继电器,高压激活完成,整车实现唤醒.
2.2整车驱动控制控制策略
当整车已被唤醒时,系统接收驾驶员操作信号并处理,实现整车动驱动控制.与传统汽车驱动控制的不同在于,混合动力系统存在发动机和电机两个动力源,不同行驶工况对应着不同运行模式,如何在发动机和电机之间分配动力以及切换不用运行模式是驱动控制策略的重点[5].
目前混合动力汽车控制策略主要分为规则型控制策略和最优化控制策略.规则型控制策略因控制简单、效果好被广泛应用.为了充分利用电网电能,最大化的减少发动机的使用,设计的PHEV驱动控制策略采用以电为主的规则控制策略,车辆运行的能量主要来自电机,发动机主要在某些特定情况使用.
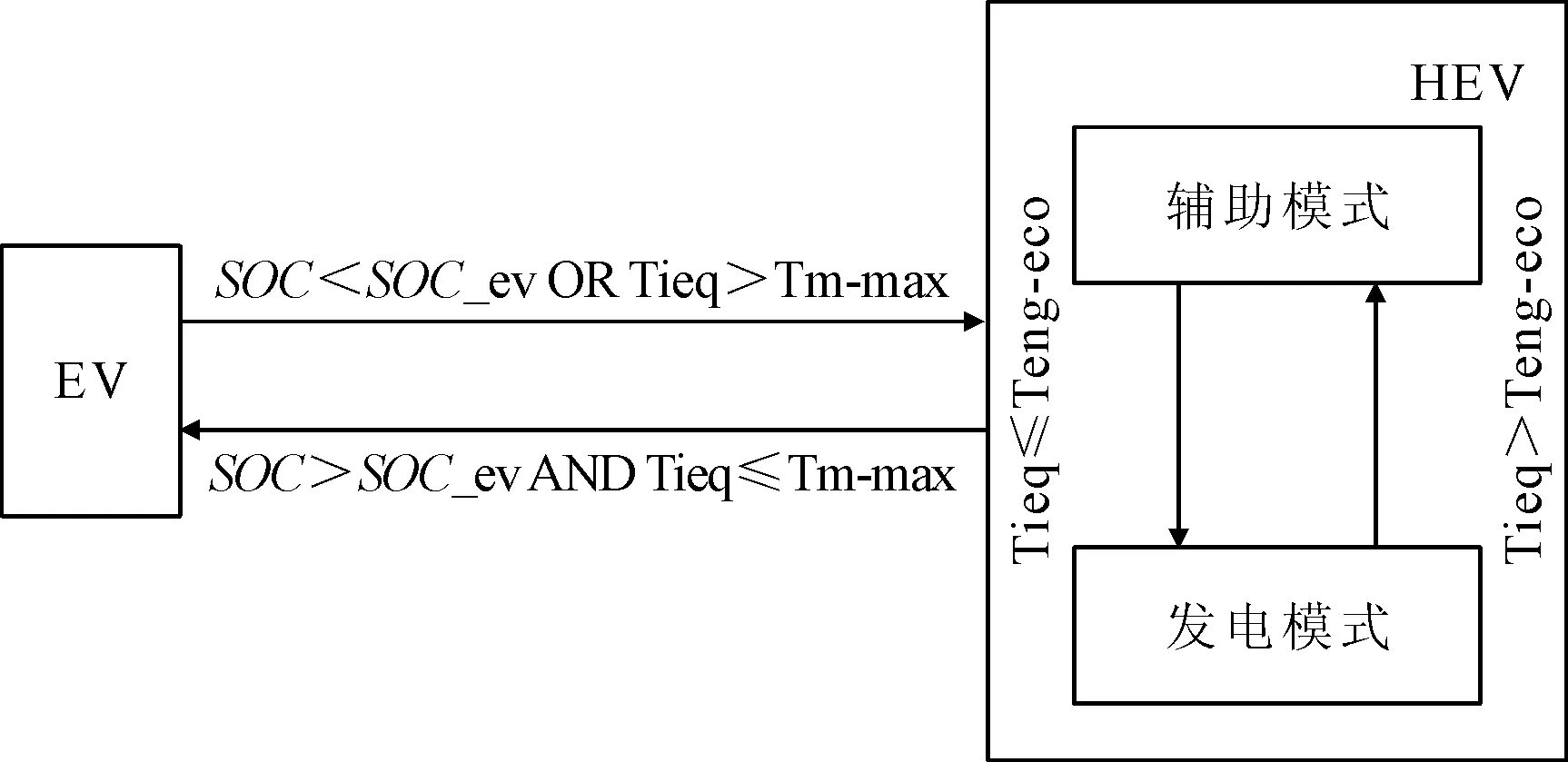
PHEV有3种运行模式:纯电动模式(EV)、混合动力模式(HEV)、制动模式.在HEV中根据电机的作用又可分为辅助模式和发电模式.不同模式切换控制策略如下.
当SOC≤SOCsafe,禁止行车.
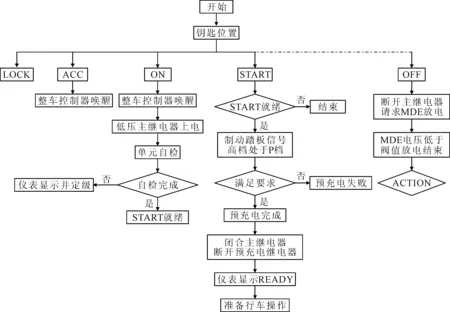
图3 行走模式唤醒控制策略流程图
当SOCsafe 当SOCev≤SOC且Tm-max≥Treq,车辆进入EV模式,发动机关闭,牵引电机工作提供全部驱动力矩.Teng=0,Tm=Treq. 当SOCev≤SOC且Tm-max 若Teng-eco 若Teng-eco≥Treq,车辆进入辅助模式,电机辅助发动机工作,尽可能的多利用电机输出转矩,不同模式切换流程见图4. 图4 运行模式切换 图中:SOCsafe,SOCnor,SOCev分别为车辆安全行驶、正常行驶和EV模式下行驶最低SOC限值;Treq为车辆需求转矩;Tm-max为电机最大转矩;Teng-eco为发动机在经济高效区域转矩. 2.3制动能量回收控制策略 制动能量回收是混合动力系统控制最重要的一部分,在一定程度上决定了整车的动力性和经济性.所谓的制动能量回收是指汽车在制动或滑行时,驱动电机利用车轮的反向拖动,产生一个反向力矩,此时驱动电机转化为发电机,将电能储存在蓄电池,将原本以热能消失的能量回收再利用.整车制动能量回收控制流程见图5. 图5 制动能量回收控制策略流程图 回收制动是为了能量的有效利用,但并不是每个制动过程都会进行,这需要综合考虑制动回收系统寿命、性能等因素[6-7].目前主要以蓄电池SOC值为参考,当电池满电,此时无法承受大电流充电,主电机能够提供的制动转矩及其有限,甚至为零.在这种情况下,发动机将提供全部制动转矩.随着SOC的降低,主电机回收制动产生的制动转矩增大.传动系统将速比设高,减少发动机传递给输出轴的制动转矩.在某一时刻,主电机将会提供全部所需的制动转矩,离合器将会提前断开,保证发动机提供的制动转矩为零. 回收制动能力还受到电机发电能力的限制,制动回收的过程中,制动力矩不能超过电机所能提供的最大力矩[8].这就意味着制动力很大时,单独的电机制动往往不能满足制动需求,需要机械制动和电机制动共同作用. 3仿真分析 目前电动汽车仿真方法分为前向仿真和后向仿真,前向仿真方法适合用于开发硬件在回路系统,而后向仿真适用于控制策略的评估与筛选[9]. GT-drive是GT-suite软件的主要组成部分.GT-drive可以用于车辆的动力性,燃油经济性以及排放性能的仿真,采用模块化 的建模理念使得用户可以便捷的搭建不同 配置的车辆模型,具有复杂完善的求解器,确保计算的快速完成[10]. 为了验证设计的整车控制策略的可靠性和合理性,利用GT-drive仿真软件建立整车后向仿真模型,见图6. 图6 PHEV整车仿真模型 由图6可知,整车动力系统结构采用GT-drive中MECHANICAL模块搭建,如发动机、变速器、电机等;控制系统则利用CONTROL模块进行模拟.模型搭建后,将整车参数输入模型,设置循环工况参数,运行系统. 图7为循环工况车速图.由图7可知,在验证控制策略验证的循环工况选择上,采用路况复杂的FTP75.时长1 874 s,最高车速91.45 km·h-1,平均车速34.1 km·h-1,整个过程存在加速、减速、制动等工况. 图7 循环工况车速图 图8为SOC变化图,图9为电机和发动机功率图.由图8~9可知,车辆启动时SOC值为0.6,电池电量充足,车辆以EV模式运行.启动后SOC会有短暂上升趋势,这是因为车辆进行急加速,需求转矩大于电机最大转矩,此时虽然电量充足,车辆进入HEV模式,发动机提供转矩的同时为蓄电池充电.随后SOC整体呈下降趋势,整车以电消耗为主,发动机作为辅助动力源.在下降的过程中SOC仍然会有少许波动,这是因为制动过程中制动能量回收的缘故.在整个运行工况中,发动机工作区间小,车辆充分利用蓄电池电能提供动力,避免发动机工作,不同模式间的切换迅速且准确. 图8 SOC变化图 图9 电机和发动机功率图 将仿真结果与原车型参数进行对比,见表2. 表2 仿真参数与原车型参数对比 由表2可知,仿真结果得到的PHEV各项都满足要求,其中油耗为3.92 L/(100 km),比原车节油48.5%.由于采用原发动机,增加蓄电池,虽然整车重量增加315 kg,但整车功率也相应增加,故动力性得到一定提高. 4结 束 语 为降低油耗,在传统车型上进行了插电式混合动力汽车改造设计并在车辆运行的不同阶段设计了不同控制策略. 所设计的整车控制策略很好地实现了对车辆的控制.根据以电为主的控制策略仿真结果油耗为3.92 L/(100 km),在循环工况运行中,根据SOC和转矩需求,整车以纯电动模式启动,先后经历发动机驱动并给电池充电、发动机和电机联合驱动、制动能量回收等模式,在切换过程中迅速且准确,满足设定要求,这为后续样机的制作提供了理论基础. 参 考 文 献 [1]王云龙,张洪田.混联式混合动力系统模糊控制器研究[J].武汉理工大学学报(交通科学与工程版),2013,37(4):733-736. [2]TONY M, ANDREW S. Plug-In hybrid electric vehicle energy storage system design[C]. Advanced Automotive Battery Conference,2006. [3]宋雪静.基于双MCU的纯电动汽车整车控制器硬件设计[J].汽车电器,2014(5):33-36. [4]朱敏晔,赵治国,萧蕴诗.基于 MPC555 的 HEV 控制系统开发[J].华东交通大学学报,2007,24(4):101-103. [5]吴剑.并联式混合动力汽车能量管理策略优化研究[D].济南:山东大学,2008. [6]高树健.电动汽车的回收制动控制策略研究及仿真[D].西安:长安大学,2013. [7]林双武.电动汽车制动控制策的略研究 [D].哈尔滨:哈尔滨工业大学,2010. [8]赵国柱.电动汽车回收制动若干关键问题研究[D].南京: 南京航空航天大学,2012. [9]夏青松.电动汽车动力系统设计及仿真研究[D].武汉:武汉理工大学,2007. [10]张睿,孙涛,王凯.基于GT drive某车的动力性与经济性能仿真分析[J].汽车实用技术,2013,27(4):26-29. Research on the Vehicle Control Strategy Based on GT-drive WANG Zhihong1,2)ZHANG Fei1)DU Changqin1)YANG Huiping1)LIU Yun1) (WuhanUniversityofTechnologyHubeiKeyLaboratoryofAdvancedTechnologyforAutomotiveComponents,HubeiCollaborativeInnovationCenterforAutomotiveComponentsTechnology,Wuhan430000,China)1)(ZhengzhouNissanAutomobileCo.Ltd.,Zhengzhou450000,China)2) Abstract:In this study, a conventional vehicle is converted into a Plug-in Hybrid Electric Vehicle (PHEV) and the corresponding vehicle control strategy is designed. According to different driving conditions, the vehicle start-up strategy, powertrain control strategy and braking energy recovery strategy are designed. The software GT-drive is used to model and to simulate the PHEV. The analysis results show that the control strategy of PHEV can meet the requirements of vehicle in different driving conditions and the vehicle has good power performance and fuel economy. In the full use of electric energy, the fuel consumption per 100 km is found to be 3.92 L, which is 48.5% lower than that of the traditional vehicle. Key words:PHEV; vehicle control strategy; GT-drive 收稿日期:2016-04-29 中图法分类号:U469.72 doi:10.3963/j.issn.2095-3844.2016.03.022 王志红(1980- ):男,讲师,主要研究领域为新能源汽车及动力控制 *国家自然科学基金项目资助(51275367)