光纤陀螺温度误差自适应神经模糊补偿方法
2016-07-01冯卡力李安覃方君李峰海军工程大学电气工程学院湖北武汉430033
冯卡力,李安,覃方君,李峰(海军工程大学电气工程学院,湖北武汉430033)
光纤陀螺温度误差自适应神经模糊补偿方法
冯卡力,李安,覃方君,李峰
(海军工程大学电气工程学院,湖北武汉430033)
摘要:依据Shupe热致非互易性理论,研究光纤陀螺温度漂移产生机理,设计了-15℃~50℃温度范围内实验。将自适应神经模糊推理系统和分段建模思想相结合,以实测数据构建训练样本,建立光纤陀螺温度误差自适应神经模糊补偿模型。该模型解决了传统建模方法中模型适配性较差的问题,并有助于缩短陀螺进入稳态的时间。数据计算表明,用所建立的模型进行误差补偿后,温度漂移标准差降低了75. 55%,补偿效果明显。
关键词:控制科学与技术;光纤陀螺;温度漂移;自适应神经模糊推理;误差补偿;分段建模
覃方君(1979—),男,副教授,硕士生导师。E-mail:haig2005@126. com
0 引言
光纤陀螺是一种基于萨格奈克(Sagnac)效应的光电惯性敏感器件。在实际应用中,温度变化使陀螺输出信息中包含较大的温度漂移[1]。温度漂移除了在陀螺使用过程中会影响系统精度外,在陀螺的启动之初也会产生较大的影响。如果在陀螺进入稳态之前,就使用其输出信息进行惯导系统的初始对准,必定会影响惯导的对准时间和对准结果。而若等到陀螺进入稳态后再进行初始对准,则失去了快速启动的优势[2]。因此,对温度影响的处理成为光纤陀螺实用化中不可避免的问题。
为了研究温度对陀螺的特性限制,国内外学者做了大量研究工作。1980年Shupe指出,在干涉型光纤陀螺中,光纤环上存在由温度变化引起的非互易相位误差[3],并推导了该误差的数学表达式。Shupe误差从理论上指出了温度漂移的机理。但单纯依靠Shupe误差方程对温度漂移进行补偿是非常困难的。因为实际的热致非互易相位误差产生是非常复杂的,它与光纤环的绕制方式、温度场的分布及其变化均有关[4]。
本文介绍了Shupe误差方程,阐述了光纤陀螺温度漂移的产生机理,提出了自适应神经模糊推理系统与分段建模思想相结合的建模方法,并采集了-15℃~50℃温度范围内陀螺输出数据。利用陀螺输出数据和本文提出的建模方法建立补偿模型,并利用同温度范围内其他组陀螺数据对该模型进行验证,发现补偿效果明显,方法可行。
1 温度漂移机理分析
光纤陀螺是基于Sagnac效应的光纤Sagnac干涉仪,构成其核心的部件对温度变化敏感,会产生热致非互易相移,导致陀螺输出信息中包含温度漂移。
陀螺启动后,由于内部的光学及电子元件等存在发热效应,会在陀螺内部产生一个变化的温度场,它与光纤的空间位置和时间有关。光纤陀螺仪自身存在缺陷:1)陀螺器件材料性能本身对温度十分敏感;2)周围温度场对陀螺工作状态会产生极大的影响。当环境温度发生变化时,陀螺的温度漂移明显加剧,标度因数的线性度也严重恶化[5 -6]。实测的温度漂移曲线如图1所示。
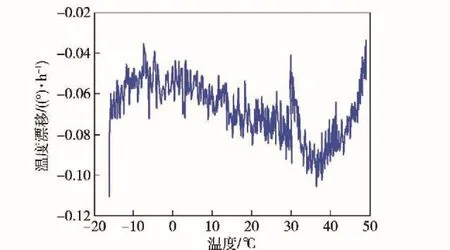
图1 实测温度漂移曲线Fig. 1 The curve of measured temperature drift
由于光纤环中的光纤很长,两束相向传输的光波达到光纤环中某一局部位置存在一个微小时间延迟,使得在同一温度场、不同时刻对光波产生了不同影响,这时两束光波间产生非互异相移。Shupe推导出当两束干涉光分别以顺时针(CW)和逆时针(CCW)方向传输通过长度为L、折射率为n的光纤环时产生的相位延迟[7]分别为

式中:φCW(t)为顺时针光沿光纤环传输产生的相移;φCCW(t)为逆时针光沿光纤环传输产生的相移;β0为光在真空中的传输常数,其值为2π/λ,λ为光波长;c为光在光纤环中传播的速度;z为任一点到端点的距离;ΔT为光纤环z点处的温度分布变化量。
(2)式减(1)式得


根据光的传播理论知识,在折射率为n的介质中,光的传播速度为

式中:c0为光在真空中的速度。因此(4)式可变为

将(6)式按(0,L/2)和(L/2,L)两部分积分得
对(7)式等号右边第2个积分进行变量替换,设

则
将(9)式代入(7)式中,化解后可得到光纤环温度变化产生的热致非互易相位延迟为

(10)式从理论上揭示了光纤陀螺温度漂移产生机理。
此外,光纤陀螺的一些元器件如Y-波导、保偏光纤耦合器等受温度影响时,也会使顺、逆时针传输光之间产生有害的非互易相移[8],从而间接影响光纤陀螺的偏置稳定性。因此,单纯依靠Shupe误差方程对温度漂移进行补偿是非常困难的。
2 补偿模型及实验设计
2. 1 模型分析
非线性系统建模问题是目前学术界研究的热点问题。传统温度建模方法有多项式法、神经网络法、微分(或差分)法及分块系统法等,都取得了一定成果。但在实际工程领域,遇到的一般都是复杂的、多变量的、具有不确定性的非线性系统,采用上述常规的方法往往存在一定的限制,对非线性、复杂的系统适应性较差。
模糊推理系统(FIS)以模糊理论为主要计算工具[9],它可以实现复杂的非线性映射,非常适于表示模糊的经验和知识,但单独的FIS缺乏有效的学习机制。人工神经网络(ANN)是一个能够学习、总结归纳的系统,它能够通过已知的数据来学习和归纳总结,但是在逻辑推理方面它不能很好地表达人脑的推理功能[10]。自适应神经模糊推理系统(ANFIS)是一种采用Takagi-Sugeon模型的模糊推理系统,该系统既有机地结合了FIS和ANN的优势,又弥补了各自的不足[11 -12],使模糊推理系统能够最佳地模拟输入和输出的关系。
基于ANFIS在非线性系统建模上的突出能力,考虑用其对陀螺漂移进行建模。观察图1可以发现,在不同的温度区间,温度对陀螺漂移的影响效果不同。因此,本文提出将ANFIS和分段建模思想相结合的建模方法。根据温度和陀螺漂移的对应关系,分析实测数据后,将温度分成3个区间:-15℃~0℃,0℃~30℃,30℃~50℃.在各个温度区间内利用ANFIS分别建立补偿模型,再通过处理将各分段模型连接起来形成一个完整的模型。
2. 2 模型设计
根据2. 1节的分析,由于在不同的温度区间,温度对陀螺漂移的影响效果不同,因此将自适应神经模糊推理系统和分段建模思想相结合。设计的模型如图2所示。
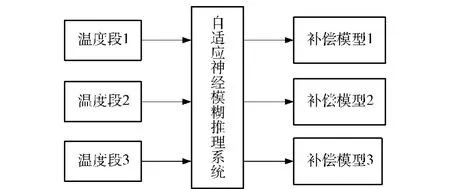
图2 分段建模示意图Fig. 2 Schematic diagram of piecewise modeling
将分段建模得到的3个温度补偿模型按照温度由低到高顺序连接,得到全温度段完整的温度补偿模型。图2中自适应神经模糊推理系统模块的具体结构如图3所示。由于温度和温度变化率都对陀螺漂移产生影响,因此将温度和温度变化率同时作为模糊系统模型的输入,采用两条规则:
1)规则1:
if X is A1and Y is B1then f1= p1X + q1Y + r1;
2)规则2:
if X is A2and Y is B2then f2= p2X + q2Y + r2.
设计模糊系统的结构为5层,如图3所示。
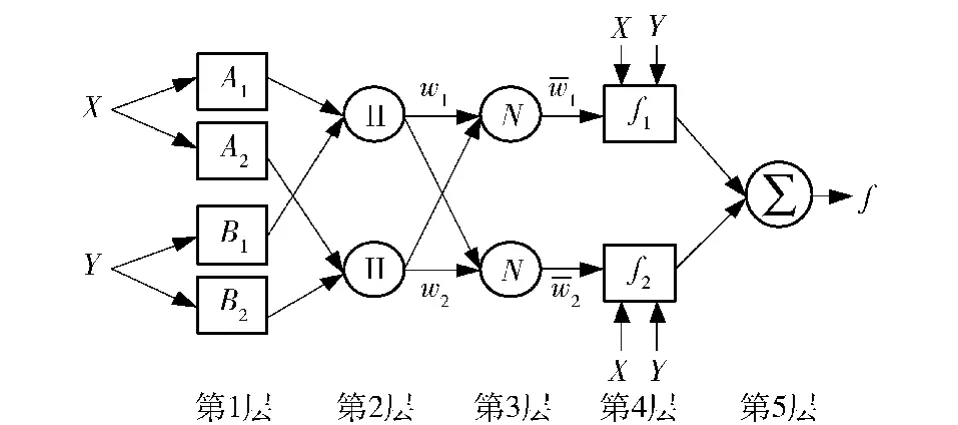
图3 模糊系统结构Fig. 3 Structure of fuzzy system
训练过程分两部分完成,分别为前向阶段和反向阶段。前向阶段过程为:
1)根据采集到的陀螺输出和温度信息数据构造训练数据对((X,Y),z),用于模型的训练。其中X、Y、z分别表示采集的温度、温度变化率和陀螺输出。
对于第j(j = 1,2,…,n)对训练数据对((Xj,Yj),zj),当开始训练时,首先采用钟形函数将温度输入信息模糊化,得

式中:a、b、c为待求的前提参数,该参数决定隶属函数形状。
2)进行模糊运算,其结果为模糊化后温度信息的激励强度:
3)对第2步输出的温度激励强度进行归一化处理,即将作为系统输入变量的温度和温度变化率各自激励归一化,得
4)结合规则1和规则2,完成自适应运算,建立模糊推理结论部分的线性模型为

式中:(p1,q1,r1)和(p2,q2,r2)为第4层两个节点的结论参数。
模糊训练总输出f表示根据输入的温度信息预测的陀螺漂移,其结果为第4步中两个节点输出的总和将(11)式~(14)式代入(15)式得

在前向过程中,首先固定前向参数a、b、c,利用最小二乘法求结论参数矢量θ为

设

式中:L为由n对训练数据对确定的最小二乘方程系数矩阵。根据模拟训练的输出结果与采集的陀螺数据z之间关系,当

值最小时,对应的θ即为结论参数的最优解θ*为

在反向阶段中,结论参数θ已知,利用(15)式和陀螺数据z得到训练误差,将训练误差由输出端反向传递到输入端;采用反向神经网络算法,更新前提参数,从而改变(11)式中的钟形函数形状,得到与输入输出匹配的隶属函数FAi、FBi,确定温度和陀螺漂移的映射关系,最后根据此函数建立陀螺的补偿模型。
2. 3 温度漂移数据采集
实验时将光纤陀螺置于温箱内,甲、乙、丙陀螺的放置方向为前、上、右,在实验过程中固定转台轴,保持陀螺敏感轴方位不变,如图4所示。陀螺仪刻度系数约为0. 024°/ h.

图4 实验温箱Fig. 4 Incubator for experiment
实验流程设定如下:1)设定温箱初始温度为-15℃,保温2 h,关闭温箱,系统上电,开始采集数据;2)采集10 h数据后,陀螺温度稳定在40℃附近,停止采集数据;3)重新启动温箱,40℃保温2 h,然后进入缓慢升温过程,升至50℃,采集5 h陀螺数据,实验结束。实验预先设定的变温方案如图5所示,其中,第1步至第2步期间,温箱处于关闭状态,系统采集陀螺数据;第2步时重新打开温箱,保温2 h,随后进入第3步,即缓慢升温阶段,同时采集陀螺输出。
本文以甲陀螺为例,在得到的陀螺输出中,减去该方向上地球自转角速度分量,并进行50s数据平均,得到的陀螺漂移如图1所示。
3 模型验证
在传统的温度漂移建模方案中,神经网络建模补偿比其他传统方法效果相对较好。为验证本方案的效果,选取神经网络法对照参考,特设计3种数据训练方案:对比方案1,ANN建模;对比方案2,ANFIS建模;本文方法,分段ANFIS建模。

图5 温度控制程序Fig. 5 Temperature control program
本文以温度信息作自变量,以陀螺漂移为因变量建立模型,反映温度和陀螺漂移间的对应关系。在确定的温度下,根据模型给出系统可能的漂移,从而进行补偿。3种训练方案的拟合及补偿效果如图6~图11和表1所示。
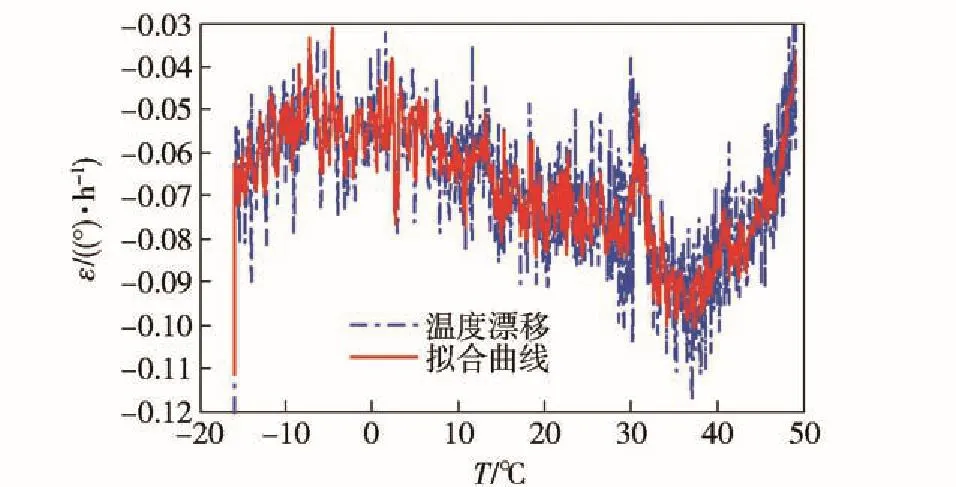
图6 ANN拟合效果Fig. 6 ANN fitting effect
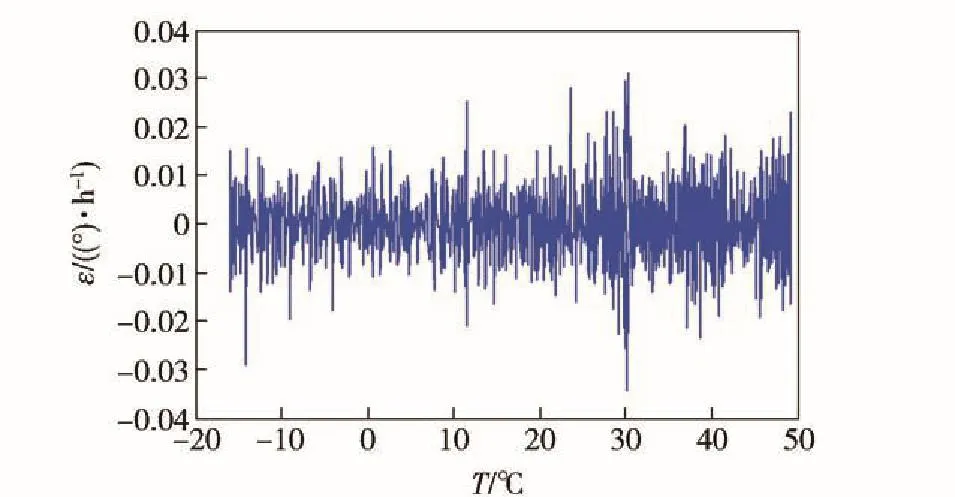
图7 ANN补偿后漂移Fig. 7 Drift after ANN modeling compensation

图8 ANFIS拟合效果Fig. 8 ANFIS fitting effect

图9 ANN补偿后漂移Fig. 9 Drift after ANFIS modeling compensation

图10 分段ANFIS拟合效果Fig. 10 Piecewise ANFIS fitting effect
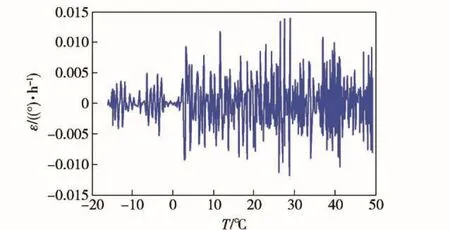
图11 分段ANFIS补偿后漂移Fig. 11 Drift after piecewise ANFIS modeling compensation
根据表1可知,方案2比方案1的补偿效果好,即本文采用的ANFIS比ANN在陀螺漂移建模补偿中具有更好的适配性。对比方案2和本文方案可以发现,利用分段思想建立的ANFIS陀螺漂移补偿模型,其补偿效果优于全温度范围内单一的ANFIS建模。

表1 补偿结果Tab. 1 Compensation results
表1中的补偿效果针对的是建模时采用的训练数据。为验证模型对非训练数据的补偿效果,再随机选取同温度范围内3组数据,用本文方法建立的模型进行补偿验证。验证效果如图12~图17和表2所示,从中可以看出,对于非训练的样本数据,本文建立的模型仍然具有良好的补偿效果。

图12 第1组数据拟合效果Fig. 12 Fitting effect of the first group data
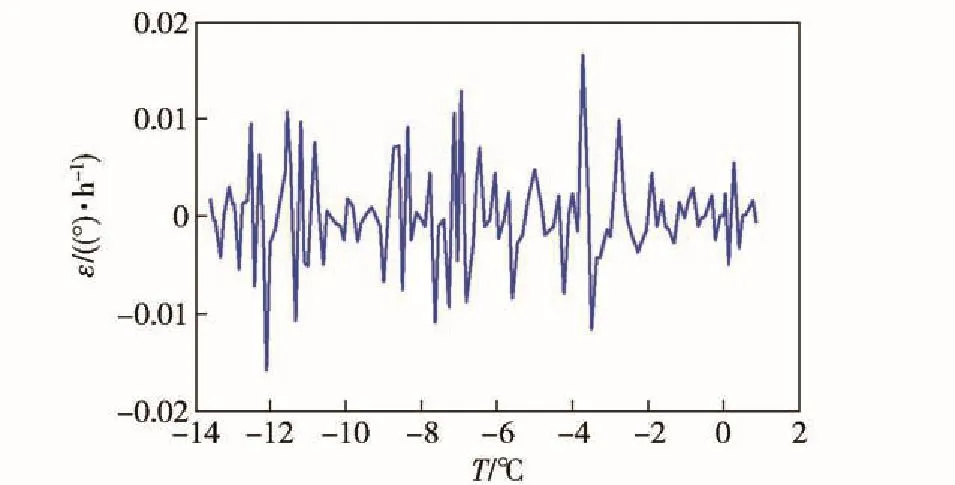
图13 第1组数据补偿后漂移Fig. 13 Drift after compensation of the first group data
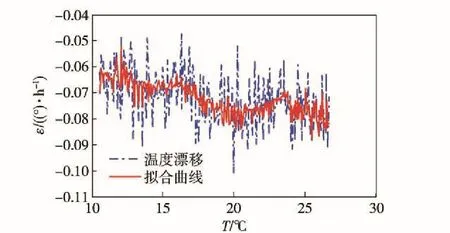
图14 第2组数据拟合效果Fig. 14 Fitting effect of the second group data
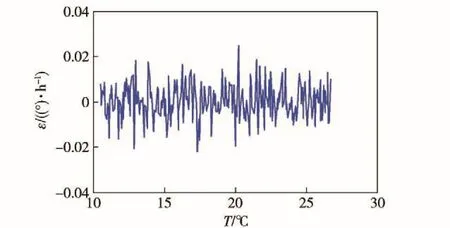
图15 第2组数据补偿后漂移Fig. 15 Drift after compensation of the second group data
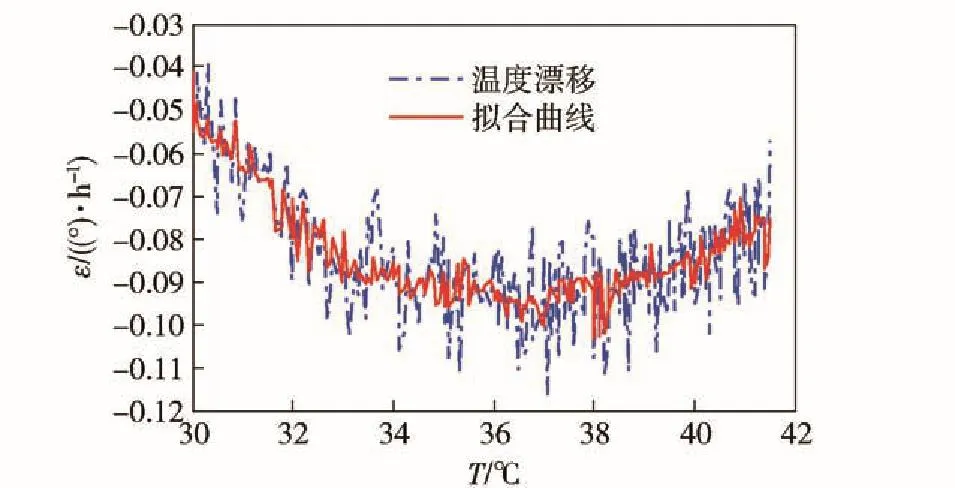
图16 第3组数据拟合效果Fig. 16 Fitting effect of the third group data
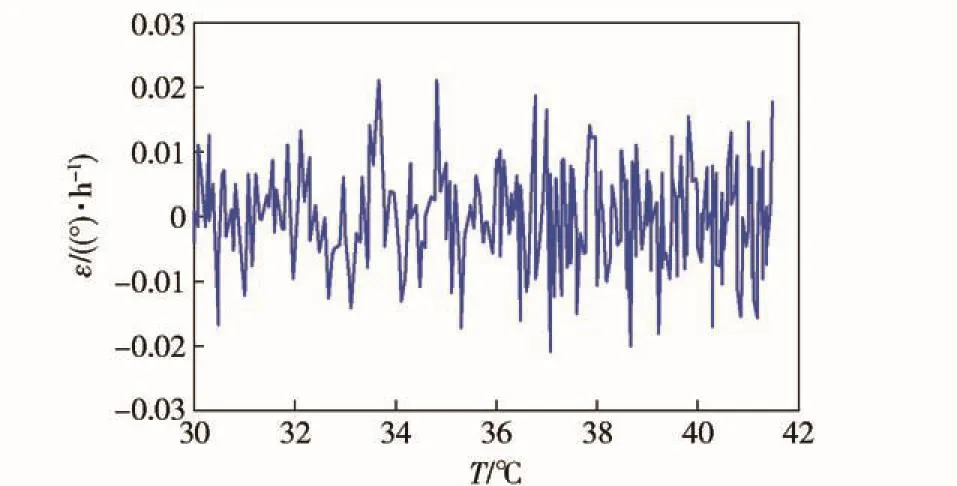
图17 第3组数据补偿后漂移Fig. 17 Drift after compensation of the third group data
4 结论
借助Shupe误差方程,分析了光纤陀螺温度漂移产生机理,从理论上揭示了温度和温度变化率对陀螺漂移的影响。设计了-15℃~50℃温度范围内实验,采用分段建模思想和自适应神经模糊推理系统相结合的方式建立补偿模型,并用所建模型对温度漂移进行补偿。数据计算表明,本文方法较传统的ANN法和单一的ANFIS法补偿效果更好,补偿前温度漂移的标准差为1. 58×10-2°/ h,采用本文模型补偿后温度漂移标准差为3. 863×10-3°/ h,比补偿前减少75. 55%,补偿效果明显,方法切实可行。

表2 验证数据补偿结果Tab. 2 Compensation results of validation data
本文所建立的模型不仅适用于训练数据,对于温度范围内的其他样本数据同样具有良好的补偿效果。良好的补偿效果有助于缩短陀螺进入稳态的时间。
参考文献(References)
[1] 王超,吴刚,凌青,等.光纤陀螺温度漂移与建模预测[J].电光与控制,2015,22(12):40 -44. WANG Chao,WU Gang,LING Qing,et al. Modeling and prediction of fiber optic gyro temperature drift[J]. Electronics Optics and Control,2015,22(12):40 -44.(in Chinese)
[2] 周琪,秦永元,赵长山.光纤陀螺温度漂移误差的模糊补偿方案研究[J].传感技术学报,2010,23(7):926 -930. ZHOU Qi,QIN Yong-yuan,ZHAO Chang-shan. Research on fuzzy compensation method of temperature drift for fiber optical gyro[J]. Chinese Journal of Sensors and Actuators,2010,23(7):926 -930.(in Chinese)
[3] 韩冰,林玉荣,邓正隆.光纤陀螺温度漂移误差的建模与补偿综述[J].中国惯性技术学报,2009,17(2):218 -224. HAN Bing,LIN Yu-rong,DENG Zheng-long. Overview on modeling and compensation of FOG temperature drift[J]. Journal of Chines Inertial Technology,2009,17(2):218 - 224.(in Chinese)
[4] 韩正英,高涵,高业胜,等.光纤环应力分布测试对光纤陀螺性能的影响[J].红外与激光工程,2014,43(12):4128 -4132. HAN Zheng-ying,GAO Han,GAO Ye-sheng,et al. Effect of strain distribution measurement of fiber coil on fog performance [J]. Infrared and Laser Engineering,2014,43(12):4128 -4132.(in Chinese)
[5] 李京书,许江宁,查峰,等.基于六类噪声项拟合的光纤陀螺噪声特性分析方法[J].兵工学报,2013,34(7):835 -839. LI Jing-shu,XU Jiang-ning,ZHA Feng,et al. Analysis method for the noise characteristics of fiber optic gyroscope based on fitting model of six noise items[J]. Acta Armamentarii,2013,34(7):835 -839.(in Chinese)
[6] 冯卡力,李安,覃方君.基于多模型分段拟合的光纤陀螺温度误差补偿方法[J].中国惯性技术学报,2014,22(6):825 -828. FENG Ka-li,LI An,QIN Fang-jun. Temperature error compensation method for FOG based on multi-model piecewise fitting[J]. Journal of Chinese Inertial Technology,2014,22(6):825 -828. (in Chinese)
[7] 吕辰刚,张瑞峰,武星,等.光纤环的热致非互易性噪声理论与实验研究[J].传感技术学报,2009,22(6):798 -802. LYU Chen-gang,ZHANG Rui-feng,WU Xing,et al. A theoretical and experimental study on thermal-induced non-reciprocity noise of fiber optical coil[J]. Chinese Journal of Sensors and Actuators,2009,22(6):798 -802.(in Chinese)
[8] 李锷,颜树华,周春雷,等.光纤陀螺温度漂移与建模补偿[J].半导体光电,2009,30(4):517 -520. LI E,YAN Shu-hua,ZHOU Chun-lei,et al. Modeling and compensation for temperature drift of fiber optic gyroscope[J]. Semiconductor Optoelectronics,2009,30(4):517 - 520.(in Chinese)
[9] 冯小虎,朱家海,谢聂,等.基于ANFIS的激光陀螺晓噪处理研究[J].传感器与微系统,2009,28(1):18 -21. FENG Xiao-hu,ZHU Jia-hai,XIE Nie,et al. Investigation of denoising in laser gyro based on ANFIS[J]. Transducer and Microsystem Technologies,2009,28(1):18 -21.(in Chinese)
[10] 赵曦晶,汪立新,何志昆,等.基于改进模糊推理的光纤陀螺温度漂移建模[J].机械工程学报,2014,50(3):15 -21. ZHAO Xi-jing,WANG Li-xin,HE Zhi-kun,et al. Modeling of temperature drift based on improved fuzzy inference for fiber optic gyroscope[J]. Journal of Mechanical Engineering,2014,50(3):15 -21.(in Chinese)
[11] 张德丰. MATLAB模糊系统设计[M].北京:北京国防工业出版社,2009:24 -40. ZHANG De-feng. Fuzzy system design based on Matlab[M]. Beijing:National Defense Industry Press,2009:24 - 40.(in Chinese)
[12] 刘斌,王常虹,蔡美华.基于自适应神经模糊推理系统的陀螺建模方法[J].中国惯性技术学报,2009,17(4):474 -478. LIU Bin,WANG Chang-hong,CAI Mei-hua. Modeling of gyroscope based on adaptive neuro-fuzzy inference system[J]. Journal of Chinese Inertial Technology,2009,17(4):474 -478.(in Chinese)
Temperature Error Compensation Method Based on Adaptive Neuro Fuzzy Inference for Fiber-optic Gyro
FENG Ka-li,LI An,QIN Fang-jun,LI Feng
(College of Electricity and Information Engineering,Naval University of Engineering,Wuhan 430033,Hubei,China)
Abstract:According to Shupe thermally induced non-reciprocity noise theory,the mechanism of the temperature drift of fiber-optic gyro is researched,and a temperature experiment with range of -15~50℃is designed. A temperature error compensation model based on adaptive neuro fuzzy inference for fiberoptic gyro is established by using the adaptive neuro fuzzy inference system and the piecewise modeling method and constructing the training sample from the measured data. The proposed model is used to solve the problem of poor model matching,and can help to shorten the time of the gyro entering into the steady state. The calculated results show that the standard deviation of the temperature drift is reduced by 75. 55%after compensation with the proposed method.
Key words:control science and technology;fiber-optic gyro;temperature drift;adaptive neuro fuzzy inference;error compensation;piecewise modeling
中图分类号:TG156
文献标志码:A
文章编号:1000-1093(2016)04-0641-07
DOI:10. 3969/ j. issn. 1000-1093. 2016. 04. 010
收稿日期:2015-06-24
基金项目:国防预先研究项目(4010103010101)
作者简介:冯卡力(1991—),男,助教,硕士研究生。E-mail:fengkali@126. com;
