汽车主动安全的防碰撞技术研究现状
2016-05-17广东工业大学信息工程学院吴海生吴黎明王桂棠何瑞进
广东工业大学信息工程学院 吴海生 吴黎明 王桂棠 何瑞进
汽车主动安全的防碰撞技术研究现状
广东工业大学信息工程学院 吴海生 吴黎明 王桂棠 何瑞进
【摘要】汽车防碰撞技术作为汽车主动安全系统的主要研究方向之一,一直受到研究者们的高度重视。在防碰撞技术研究中,具有视场广、信息量大、功能多的机器视觉已经代替信息量单一的微波雷达成为研究重点。本文重点介绍在汽车主动防撞技术研究中,基于机器视觉的运动目标检测算法,并对粒子滤波算法和Mean Shift算法进行对比分析。
【关键词】防碰撞;主动安全;机器视觉;检测算法
0 引言
据报载,全世界每年因交通事故死亡的人数约130万,交通事故是“世界第一公害”,这已成为世界范围内的共识[1][2]。据美国联邦公路局相关统计数字显示,在各种交通事故中,因换道操作引起的事故占9%,车道偏离引起的占23%,十字交叉路口抢行的占25%,而追尾碰撞的高达28%[3]。研究数据表明,如果能准确地进行安全预警为驾驶员采取避撞措施避免碰撞赢得足够的反应时间,可以避免62%追尾碰撞[4]。可见防追尾碰撞技术在汽车主动安全技术研发的重要性。
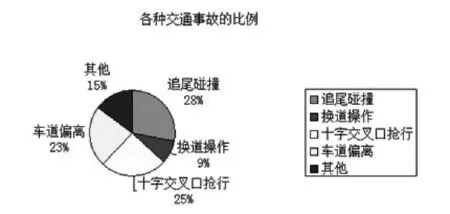
图1 各种交通事故所占比例
1 测距技术
在汽车防碰撞应用技术研发过程中,车辆间距离的准确判断是技术实现的基础。目前在汽车安全系统中应用较多的测距技术有激光、超声波、微波和机器视觉,这四种测距方式的性能比较如表1所示。
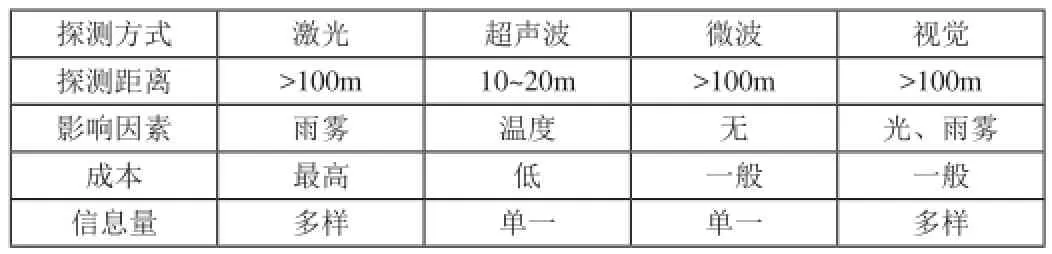
表1 四种测距方式比较
激光雷达在目标探测中可以捕获目标距离、方位、高度、速度、姿态形状等重要信息,在GOOGLE等无人汽车中作为核心距离传感器得到应用[5]。但是激光雷达容易受到粉尘、雨雾等工作环境因素影响,且成本高,目前远距激光测距仪单价在20万元以上[6]。
超声波具备方向性好,穿透力强等特点,且硬件成本低廉。但是超声波传递速度受介质的密度和稳定影响,且传播速度较慢。因此常用于测量精度不高、量程较短的场景中。
微波又称毫米波。微波雷达探测距离远、精度高,同时可以实现多目标跟踪且不受工作环境因素影响,微波雷达在汽车主动安全方面已得到普遍的应用。但微波雷达获取的信息量过于单一,难以满足防碰撞系统对环境信息多样化的要求。
机器视觉系统是由摄像机将被摄取目标转换成图像信号,通过图像处理系统进行各种算法运算从而提取目标的特征信息。机器视觉对环境信息获取能力强,即可以实现目标的跟踪和测量[7],为防追尾碰撞提供技术依据,同时在车道偏离预警[8]、盲区检测[9]等领域得到广泛应用。虽然机器视觉系统对工作环境较为敏感,如强光、雨雾天气等会影响视觉检测效果;但是由于机器视觉具有视场广、运行速度快、信息量大、功能多等优点,在汽车主动安全技术研究已得到广泛应用,是目前主动防碰撞系统研究的主要技术手段之一。
2 防撞模型
预警碰撞模型主要分为安全时间模型和安全距离模型两类[10]。安全时间模型主要以 TTC(Time to Collision)为研究对象 ,由日本东京农工大学首创,即TTC 模型[11];而安全距离模型主要以车辆之间的实际距离为研究对象,按研究思路不同又可以分为固定车距模型、运动学模型和驾驶员模型等[12]。在这两种模型的基础上又相继提出基于概率、减速度等指标的改进模型。其中基于避免冲突的最大减速度模型DRAC(Deceleration Rate to Avoid Crash)相对实用性更强。
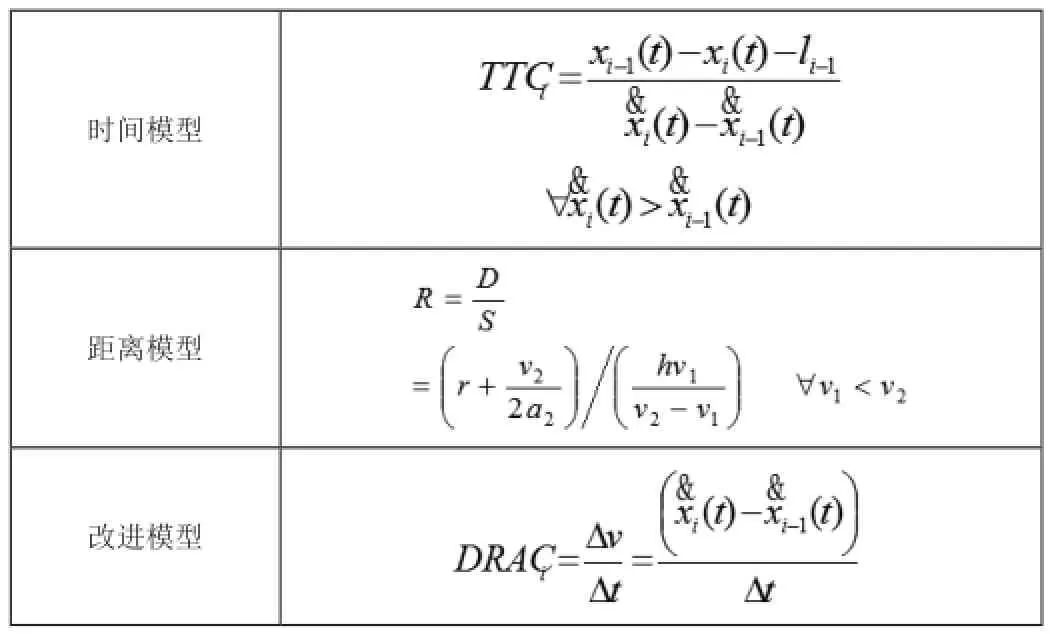
表2 预警碰撞模型
表2中,TTCi是第i辆车的追尾碰撞时间;xi-1(t)是t时刻i-1车的位置;xi(t)是t时刻i车的位置;i-1(t)是t时刻i-1车的速度;i(t)是t时刻i车的速度。在距离模型中,v1、a1和v2、a2前后车的速度和加速度,车间距为h;后车反应时间为r,实际制动距离为D,从产生冲突到发生碰撞的距离记为S,R是制动距离比。DRACi是第i辆车为避免碰撞冲突所采取的减速度;是两车的运动时间差,即TTC值。
3 运动目标检测跟踪算法
在防碰撞研究中,对运动目标的检测是算法研究的重中之重。对运动目标的经典检测跟踪算法有光流法[13]、时域差分法(又称帧差法)[14]和背景减除法[15]。经典的算法难以解决运动目标检测中出现的遮挡、阴影等问题,而且鲁棒性较差、检测效率低,难以满足汽车主动防碰撞系统智能化的检测需求。目前基于视觉的防撞技术研究中对运动目标的常用检测算法有:粒子滤波算法[16]和Mean Shift算法[17]。
3.1粒子滤波算法
粒子滤波算法是一种用来对非线性动态系统的目标概率分布进行逼近的新技术,在视觉目标跟踪研究领域得到广泛应用。粒子滤波算法具有灵活、易于实现、并行化、应用前景广阔以及有效处理非线性问题等特点。其基本思想是构造一个基于样本的后验概率密度函数。假设动态系统状态空间模型如下所示:
其中,函数f(x,v)、h(x,n)可以是线性也可以是非线性的;x为系统状态变量,y为系统测量变量,v、n分别代表系统噪声和测量噪声。
假设系统状态x服从一阶马尔可夫过程,系统状态x与量测变量y相互独立,初始状态x0的先验分布为p(x0)。从p(x0:k/y0:k)中抽取N 个独立同分布的样本{xi0:k;i =1,…,N},状态的后验概率密度(Posteriori probability density)可以用经验分布逼近为:
式中δ(g)表示狄拉克函数。
在实际应用中,后验概率密度常常是多变量、非标准概率,因此需要基于先验条件描述目标状态对应的加权值ω,再利用加权和的形式描述目标状态的后验概率密度,如式:
式中,加权值ωk(x0:k)称为重要性权值。
重要性分布函数为:

选取重要性函数的准则是使重要性权值的方差最小。
粒子滤波算法的一个主要问题是退化问题,即经过几步迭代以后,除了极少数粒子外,其他的粒子权值小到可以忽略不计的程度。针对粒子滤波的退化现象,主要的解决方法有两种。一是选择好的重要密度函数;二是使用重采样技术。通过重采样去除权值较小的粒子并复制权值较大的粒子。粒子滤波跟踪算法具有较强的稳定性、鲁棒性以及抗遮挡能力。但是粒子滤波跟踪算法采样依旧是基于全局搜索采样,其算法效率有待提升。
3.2Mean Shift算法
Mean Shift即均值漂移,其概率密度分布最大的方向即漂移的方向。Mean Shift算法是利用核密度估计方法,对给定d维空间Rd中n个样本点集S=﹛xi,i=1,…,n﹜,利用核函数k(x)和函数窗宽h,在x点处的进行概率密度估计,为确定漂移方向提供基础。基于核函数的无参数密度估计如式:
核函数直方图:

目标密度函数:
其中,b(xi):R→{1,…,m}是将坐标为xi的像素的量化值,m是直方图阶数;u是直方图索引。相似度函数:
式中加权因子wi为:
Mean Shift目标跟踪算法的运行步骤如下。
Step1:初始化y0的目标密度函数pu(y1);
Step2:计算加权因子wi,并根据迭代公式更新位置y1;
Step3:根据更新的位置信息计算其目标密度函数pu(y1)及相似度ρ(y1)。如果有ρ(y1)< ρ(y0),则y1=(y0+y1)/2重新计算相似度ρ(y1);如果‖y0+y1‖<ε,则停止;否则y0=y1,回到step2。
Mean Shift目标跟踪算法避免了全局搜索,极大提升了算法运行效率。在实际应用中快速的模式匹配能更好满足对目标跟踪实时性的要求。除此之外,采用核函数颜色直方图对目标进行建模,对目标一定程度的形变干扰不敏感,识别准确度高。由于Mean算法基于密度估计进行局部有效的搜索,但是也造成Mean Shift算法对处理目标遮挡等问题能力不强。
3.3算法研究趋势
无论粒子滤波还是均值漂移算法,都针对运动目标检测跟踪具体出现的问题提出有效的解决方法,同时也暴露了单个算法本身的缺陷,难以兼顾检测准确性及效率。对于实用性要求较高的防碰撞技术研究过程中,更多精力集中在多算法融合,提升算法整体检测的准确性和检测效率。董慧芬等人提出基于自适应卡尔曼滤波与Mean Shift算法相结合,很好解决了背景图像阴影和遮挡对目标跟踪造成的干扰问题[18];廖逸琪则基于目标特征检测融合蚁群算法实现对运动目标的轨迹跟踪[19];张广秀则基于小波变换实现汽车前向防撞技术研究[20]。
4 总结
汽车主动防碰撞技术研究从开始的车与车之间的防碰撞扩展到后来车与人的防撞,甚至要求具备一定程度的路线规划及决策能力,其探测手段也从原来微波雷达转向检测能力更强的视觉技术。而在算法研究上,更加趋向多算法融合。深度学习作为机器学习领域一个新的研究方向,也逐渐在汽车防碰撞技术研究中得到推广应用。
参考文献
[1]刘志强,赵艳萍,汪澎.道路交通安全工程[M].北京:高等教育出版社,2012.
[2]涂孝军.面向驾驶员辅助系统的换道意图辨识方法研究[D].江苏大学,2015.
[3]王家恩.基于视觉的驾驶员横向辅助系统关键技术研究[D].合肥工业大学,2013.
[4]戴荣军,周俊,王海清.新型主动防撞安全预警距离模型[J].农业装备与车辆工程,2014(8):42-47.
[5]无人驾驶汽车的“眼睛”,变得更加锐利了[J].电子世界,2015(18).
[6]无人驾驶汽车“眼睛”LIDAR成本降低[EB/OL].http://news. zol.com.cn/538/5388238.html,2015-09-08.
[7]刘铭.基于ORB算法的双目视觉测量与跟踪研究[D].哈尔滨工业大学,2014.
[8]许伦辉,罗强,夏新海,胡三根.车道偏离预警系统中偏离时间的估算方法[J].华南理工大学学报,2014,42(3):59-65.
[9]杨思思.基于单目视觉的车辆盲区预警系统的研究及实现[D].浙江大学,2015.
[10]王建强,迟瑞娟,张磊等.适应驾驶员特性的汽车追尾报警-避撞算法研究[J].公路交通科技,2009,26(1):7-12.
[11]Yoshida H,Awano S,Nagai M,et al.Target following brake control for collision avoidance assist of active interface vehicle[C].2006 International Joint Conference,IEEE,2006:4436-4439.
[12]于广鹏,谭德荣,马福霞.汽车防碰撞预警/碰撞算法研究现状及分析[J].山东理工大学学报,2014,28(6):1-5.
[13]袁国武,陈志强,龚健等.一种结合光流法与三帧差分法的运动目标检测算法[J].小型微型计算机系统,2013,3(3):668-671.
[14]陈春雨,姚秋香,乔玉龙.基于帧差法和边缘检测法的视频分割算法[J].济南大学学报,2012,26(1):31-36.
[15]王小平,张丽杰,常佶.基于单高斯背景模型运动目标检测方法的改进[J].计算机工程与应用,2009,45(21):118-120.
[16]陈丁.基于视觉的汽车列车行驶轨迹测量系统[D].东南大学,2014.
[17]刘晴,唐林波,赵保军,孙景乐.改进的Mean Shift目标跟踪算法[J].系统工程与电子技术,2013,35(6):1318-1323.
[18]董慧芬,董保磊,丁小芳,张振.基于相关区域分层的改进Mean Shift目标跟踪算法[J].计算机应用,2014,34(S2):286-290.
[19]廖逸琪.多摄像机下多目标跟踪相关技术研究[D].南京理工大学,2015.
[20]张广秀.基于视觉的汽车前向防碰撞技术研究[D].河北工业大学,2008.
吴海生(1989—),男,硕士,主要研究方向:嵌入式系统、图像处理。
吴黎明(1962—),男,硕士生导师,教授,主要研究方向:光机电一体化,嵌入式系统、测控技术。
王桂棠(1964—),男,硕士生导师,教授,主要研究方向:嵌入式、机器视觉、物联网等科学技术在智能制造中的应用研究和开发。
何瑞进(1990—),男,硕士,主要研究方向:嵌入式系统,通信与信息系统。
作者简介:
基金项目:广州市科技计划项目(201300000002);广东省省级科技计划项目(2015A030401088)。